一种具有自传感功能的柔性驱动器及控制方法
本申请涉及柔性驱动,尤其涉及一种具有自传感功能的柔性驱动器及控制方法。
背景技术:
1、柔性驱动器具有柔顺性好、适应性高、质量轻、便于人机交互等优点,广泛应用在农业采摘、医疗康复、复杂场景探测等领域。柔性驱动器的高柔顺性也导致难以精确感知自身的变形。目前,大部分柔性驱动器通过表面贴附传感器或图像识别等方式感知自身变形量,这种借助外界传感器感知自身变形的方式,极大地限制柔性驱动器的应用场景。为此,本申请提出一种具有自传感功能的柔性驱动器及其控制方法。
技术实现思路
1、本申请的目的是针对以上问题,提供一种具有自传感功能的柔性驱动器及控制方法。
2、第一方面,本申请提供一种具有自传感功能的柔性驱动器,包括:
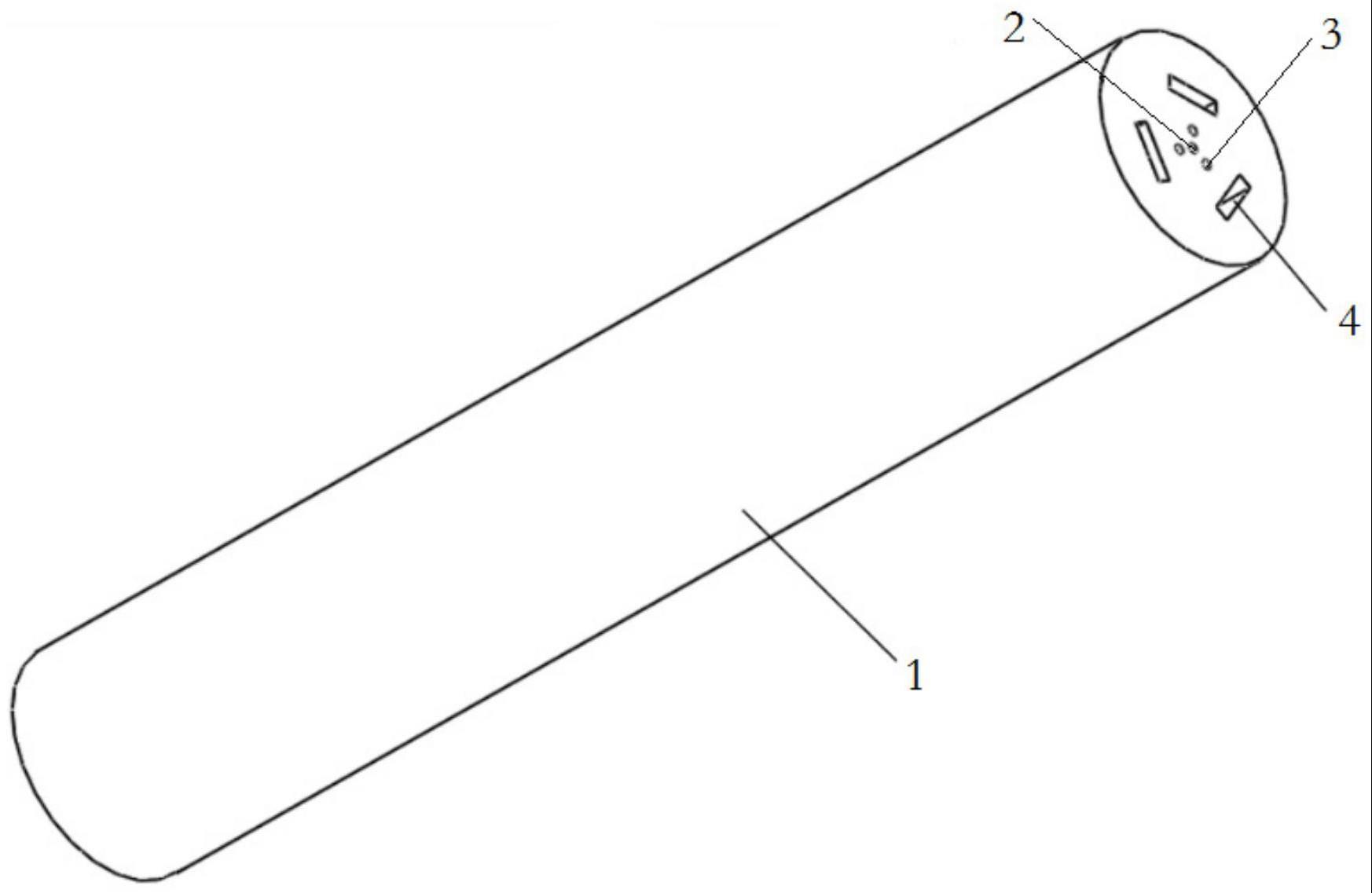
3、沿第一方向延伸的柔性基体,所述柔性基体内设有沿所述第一方向延伸的一个中心流道、环绕所述中心流道设置的多个周边流道和多个气体通道;所述中心流道和所述周边流道内均填充有导电液体;
4、多个电阻测量装置,所述中心流道和各所述周边流道分别与所述电阻测量装置一一对应连接,所述电阻测量装置用于测量与之相连的所述中心流道/所述周边流道内的导电液体的电阻值;
5、多个气管,所述气管与所述气体通道一一对应连接,所述气管用于为与之相连的所述气体通道供气,以调节所述气体通道内的气体压力。
6、根据本申请某些实施例提供的技术方案,所有的所述周边流道在标准面上的投影均匀分布在第一圆周上;所有的所述气体通道在所述标准面上的投影均匀分布在第二圆周上;所述第一圆周和所述第二圆周同心。
7、根据本申请某些实施例提供的技术方案,所述第一圆周的直径小于所述第二圆周的直径。
8、根据本申请某些实施例提供的技术方案,所述周边流道的数量与所述气体通道的数量相等。
9、根据本申请某些实施例提供的技术方案,相互邻近的一对所述周边流道和所述气体通道在所述标准面上的投影的直线距离,等于所述第二圆周和所述第一圆周的半径差。
10、根据本申请某些实施例提供的技术方案,所述周边流道的数量和所述气体通道的数量均为三个;三个所述气体通道的长度相等;三个所述周边流道和所述中心流道的长度均相等。
11、第二方面,本申请还提供一种如上所述的具有自传感功能的柔性驱动器的控制方法,所述方法包括如下步骤:
12、获取第一初始数据;所述第一初始数据为所述中心流道沿所述第一方向的初始长度;
13、获取目标数据集;所述目标数据集包括目标拉伸变形量、目标弯曲方位角和目标弯曲角度;
14、获取各所述周边流道和所述中心流道内的导电液体的电阻值,得到电阻数据集;所述电阻数据集包括四个实时电阻值;
15、根据所述电阻数据集和所述第一初始数据计算得到实时数据集;所述实时数据集包括实时拉伸变形量,实时弯曲方位角和实时弯曲角度;
16、根据所述实时测量数据集和所述目标数据集控制各所述气管为与之相连的所述气体通道充气或放气。
17、根据本申请某些实施例提供的技术方案,所述实时拉伸变形量δl0为所述中心流道的实时拉伸变形量,其计算公式为:
18、
19、其中,r0为中心流道内的导电液体的实时电阻值;v0为中心流道内填充的导电液体的体积;ρ为导电液体的电阻率;l0为中心流道沿第一方向的初始长度。
20、根据本申请某些实施例提供的技术方案,所述实时弯曲方位角φ的计算公式为:
21、
22、其中,δl0为中心流道的实时拉伸变形量,δl1、δl2、δl3分别为三个周边流道的实时总变形量;δl1、δl2、δl3分别由如下计算公式得到:
23、
24、
25、
26、其中,r1、r2、r3分别为三个周边流道内导电液体的实时电阻值;v1、v2、v3分别为三个周边流道内填充的导电液体的体积;l1、l2、l3分别为三个周边流道沿第一方向的初始长度。
27、根据本申请某些实施例提供的技术方案,所述实时弯曲角度θ的计算公式为:
28、
29、其中,r0为第一圆周的半径。
30、与现有技术相比,本申请的有益效果:本申请提供的具有自传感功能的柔性驱动器,通过控制各气管对应的阀门来为各个气体通道供气以调整各个气体通道内压力的大小,从而可以实现柔性基体的拉伸变形和全方位弯曲变形;在柔性驱动器变形的同时,各电阻测量装置可以实时测量各流道内导电液体电阻值的变化,通过各电阻值的变化可以识别柔性基体的变形量;本实施例提供的具有自传感功能的柔性驱动器,不需要借助外界传感器,其利用柔性变形时微流道中导电液体的电阻值发生变化的原理,依靠内嵌在自身的传感部分来实时感知自身变形,并对驱动控制提供反馈,该柔性驱动器实现了驱动传感一体化,提高了柔性驱动器的适用性。
技术特征:
1.一种具有自传感功能的柔性驱动器,其特征在于,包括:
2.根据权利要求1所述的具有自传感功能的柔性驱动器,其特征在于,所有的所述周边流道(3)在标准面上的投影均匀分布在第一圆周上;所有的所述气体通道(4)在所述标准面上的投影均匀分布在第二圆周上;所述第一圆周和所述第二圆周同心。
3.根据权利要求2所述的具有自传感功能的柔性驱动器,其特征在于,所述第一圆周的直径小于所述第二圆周的直径。
4.根据权利要求3所述的具有自传感功能的柔性驱动器,其特征在于,所述周边流道(3)的数量与所述气体通道(4)的数量相等。
5.根据权利要求4所述的具有自传感功能的柔性驱动器,其特征在于,相互邻近的一对所述周边流道(3)和所述气体通道(4)在所述标准面上的投影的直线距离,等于所述第二圆周和所述第一圆周的半径差。
6.根据权利要求5所述的具有自传感功能的柔性驱动器,其特征在于,所述周边流道(3)的数量和所述气体通道(4)的数量均为三个;三个所述气体通道(4)的长度相等;三个所述周边流道(3)和所述中心流道(2)的长度均相等。
7.一种如权利要求6所述的具有自传感功能的柔性驱动器的控制方法,其特征在于,所述方法包括如下步骤:
8.根据权利要求7所述的具有自传感功能的柔性驱动器的控制方法,其特征在于,所述实时拉伸变形量δl0为所述中心流道的实时拉伸变形量,其计算公式为:
9.根据权利要求8所述的具有自传感功能的柔性驱动器的控制方法,其特征在于,所述实时弯曲方位角φ的计算公式为:
10.根据权利要求9所述的具有自传感功能的柔性驱动器的控制方法,其特征在于,所述实时弯曲角度θ的计算公式为:
技术总结
本申请提供一种具有自传感功能的柔性驱动器及控制方法,柔性驱动器包括:沿第一方向延伸的柔性基体,柔性基体内设有沿第一方向延伸的一个中心流道、环绕中心流道设置的多个周边流道和多个气体通道;中心流道和周边流道内均填充有导电液体;多个电阻测量装置,中心流道和各周边流道分别与电阻测量装置一一对应连接,电阻测量装置用于测量与之相连的中心流道/周边流道内的导电液体的电阻值;多个气管,气管与气体通道一一对应连接,所述气管用于为与之相连的气体通道供气,以调节气体通道内的气体压力。本申请无需借助外界传感器,其依靠内嵌在自身的传感部分来实时感知自身变形,实现了驱动传感一体化,提高了柔性驱动器的适用性。
技术研发人员:李金嵘,郑方超,王帅杰,史宝军,李涛
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!