工程机械控制方法及工程机械与流程
本发明涉及工程机械,尤其涉及一种工程机械控制方法及工程机械。
背景技术:
1、在挖掘机械施工过程中,特别是在隧道挖掘、马路边开挖沟槽、整机正常回转、周边有架空电线等复杂工况下,很容易因为视野范围受限或机手操作失误等多种原因,意外造成自来水管道、燃气管道、电缆管道、架空高压线以及周边固定设施的严重损坏,甚至还可能出现人员伤亡等严重事故。
2、为此,现有技术中通过在动臂顶端安装测距装置,检测工作装置与障碍物的距离,当距离小于设定范围时,挖掘机发动机进入怠速状态,挖掘机驱动系统停止输出。此技术尽管在一定程度上可以避免工作装置与障碍物碰撞,但整个挖掘机驱动系统停止输出,使得挖掘机行走系统、斗杆和铲斗的运动均受到了限制,不利于挖掘机作业的灵活性。
3、因此,亟需一种工程机械控制方法及工程机械,以解决上述技术问题。
技术实现思路
1、本发明的目的在于提出一种工程机械控制方法及工程机械,能够在发动机始终处于工作状态的前提下降低执行部件的运动速度,避免执行部件与障碍物碰撞。
2、为达此目的,本发明采用以下技术方案:
3、工程机械控制方法,包括如下步骤:
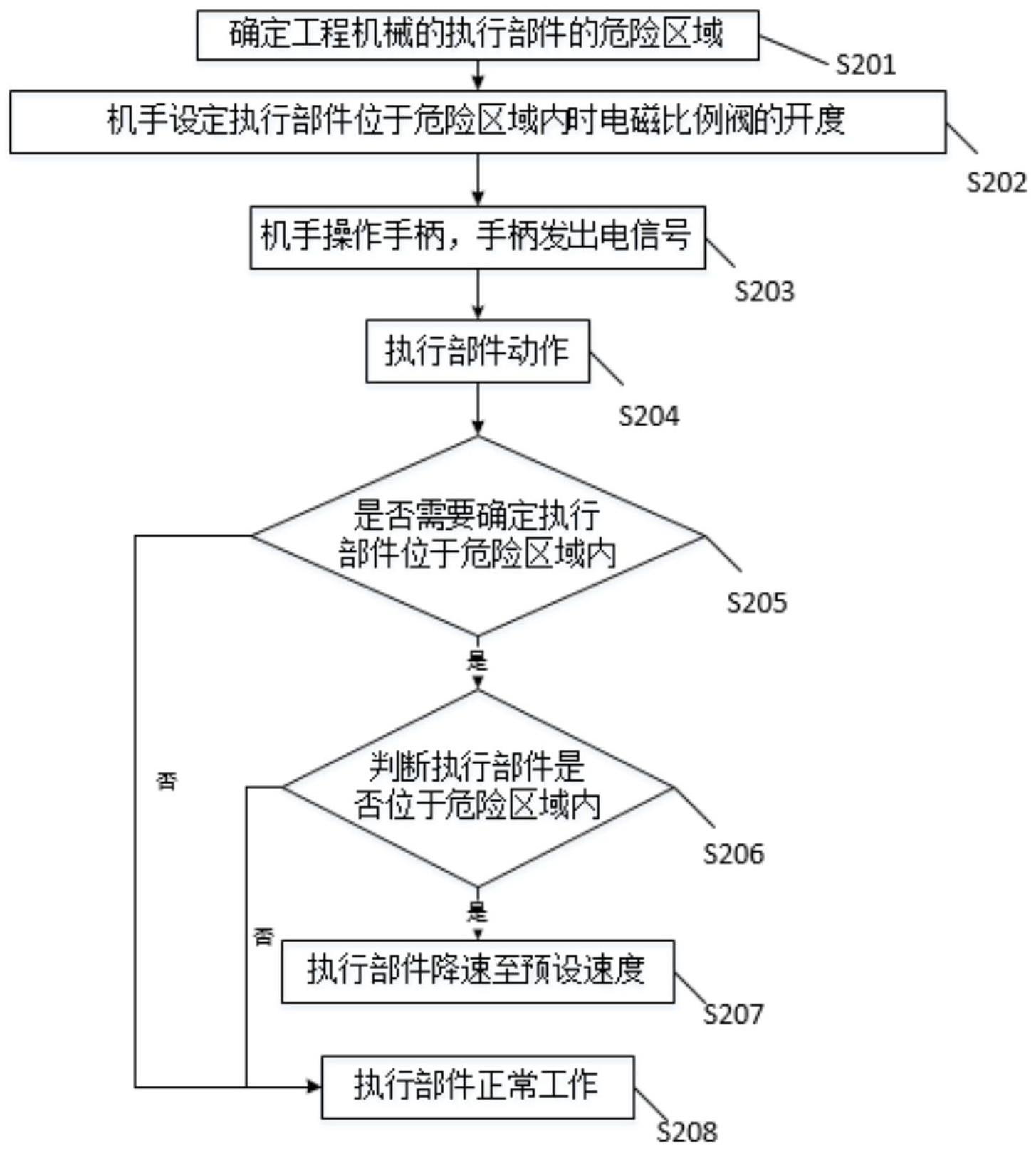
4、确定工程机械的执行部件的危险区域;
5、若执行部件在作动过程中进入危险区域,则调节电磁比例阀的开度以降低进入执行部件油缸的流量使执行部件的运动速度降低,并实时检测执行部件是否远离危险区域,若判定执行部件远离危险区域,则控制电磁比例阀的开度为全开,进入执行部件油缸的流量为最大值,执行部件按照最大速度动作。
6、作为上述工程机械控制方法的一种优选技术方案,确定工程机械的执行部件的危险区域包括:
7、设定执行部件油缸安全举升的举升行程极限值h1和执行部件油缸低速举升的低速行程极限值h2,其中h2>h1,且低速行程极限值h2小于举升行程最大值h3,举升行程极限值h1与低速行程极限值h2之间的行程区间为危险区间,执行部件油缸的危险区间对应的执行部件的作动区域即为危险区域。
8、作为上述工程机械控制方法的一种优选技术方案,设定举升高度为h,则h=ax-b,其中,x为油缸行程,a、b为常数;
9、预设的危险区域高度范围为(h1,h2),则对应的油缸行程范围为(x1,x2)。
10、作为上述工程机械控制方法的一种优选技术方案,在确定工程机械的执行部件的危险区域前,设定执行部件在进入危险区域后限定电磁比例阀的开度以降低执行部件在危险区域内的速度。
11、作为上述工程机械控制方法的一种优选技术方案,执行部件在进入危险区域后,限定电磁比例阀的开度以降低执行部件在危险区域内的速度。
12、作为上述工程机械控制方法的一种优选技术方案,执行部件的位置与危险区域的极限位置重叠后,进入执行部件油缸的流量为0,其中极限位置是指危险区域边界中执行部件与障碍物产生碰撞的位置。
13、作为上述工程机械控制方法的一种优选技术方案,工程机械的执行部件未进入危险区域时,则执行部件的运动速度与手柄档位呈正相关。
14、作为上述工程机械控制方法的一种优选技术方案,所述执行部件包括动臂、铲斗或斗杆。
15、本发明还提供了一种工程机械,其特征在于,使用上述任一项所述的工程机械控制方法进行工作。
16、作为上述工程机械的一种优选技术方案,所述工程机械包括挖掘机、装载机、打桩机、液压起重机、液压升降平台或高空作业车。
17、本发明有益效果:
18、在本实施例提供的工程机械控制方法中,通过执行部件与限位危险区域之间的关系,以控制执行部件的运动速度,这样能够防止执行部件在工作过程中因速度较快而与障碍物碰撞。工程机械能够在容易碰撞的区域进行工作,保证在工程机械整体不停机的前提下保护执行部件。由于执行部件的运动速度降低是通过改变电磁比例阀的开度用于降低进入执行部件油缸内的油液流量实现的,这样能够避免其他部件动作受到影响,实现精确控制执行部件的运动速度的目的。需要说明的是,危险区域可为一个或者多个,但是危险区域应位于执行部件工作区域范围内,以确保执行部件安全工作。
技术特征:
1.工程机械控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的工程机械控制方法,其特征在于,确定工程机械的执行部件的危险区域包括:
3.根据权利要求1所述的工程机械控制方法,其特征在于,设定举升高度为h,则h=ax-b,其中,x为油缸行程,a、b为常数;
4.根据权利要求1所述的工程机械控制方法,其特征在于,在确定工程机械的执行部件的危险区域前,设定执行部件在进入危险区域后限定电磁比例阀的开度以降低执行部件在危险区域内的速度。
5.根据权利要求1所述的工程机械控制方法,其特征在于,执行部件在进入危险区域后,限定电磁比例阀的开度以降低执行部件在危险区域内的速度。
6.根据权利要求1-5任一项所述的工程机械控制方法,其特征在于,执行部件的位置与危险区域的极限位置重叠后,进入执行部件油缸的流量为0,其中极限位置是指危险区域边界中执行部件与障碍物产生碰撞的位置。
7.根据权利要求1所述的工程机械控制方法,其特征在于,工程机械的执行部件未进入危险区域时,则执行部件的运动速度与手柄档位呈正相关。
8.根据权利要求1所述的工程机械控制方法,其特征在于,所述执行部件包括动臂、铲斗或斗杆。
9.工程机械,其特征在于,使用如权利要求1-8任一项所述的工程机械控制方法进行工作。
10.根据权利要求9所述的工程机械,其特征在于,所述工程机械包括挖掘机、装载机、打桩机、液压起重机、液压升降平台或高空作业车。
技术总结
本发明涉及工程机械技术领域,尤其涉及一种工程机械控制方法及工程机械。方法包括确定工程机械的执行部件的危险区域;若执行部件在作动过程中进入危险区域,则调节电磁比例阀的开度以降低进入执行部件油缸的流量以使执行部件的运动速度降低,并实时检测执行部件是否远离危险区域,若判定执行部件远离危险区域,则控制电磁比例阀的开度为全开,进入执行部件油缸的流量为最大值,执行部件按照最大速度动作。能够防止执行部件在工作过程中因速度较快而与障碍物碰撞。保证在工程机械整体不停机的前提下保护执行部件。降低进入执行部件油缸内油液流量能够避免其他部件动作受到影响,实现精确控制执行部件的运动速度的目的。
技术研发人员:张建永,徐荣滨,孙冬冬
受保护的技术使用者:山东临工工程机械有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!