一种基于任务流的空压系统控制方法
本发明涉及空压系统设计及优化领域,尤其是涉及一种基于任务流的空压系统控制方法。
背景技术:
1、空压系统是工业生产中不可缺少的一部分,也是工厂能耗大户。优化空压系统控制方法可以大大降低其在生产过程中的总能耗,这对于助于国家双碳战略具有重要意义。空压系统的控制优化通常依赖于给定的负荷表进行开停优化,这无法做到对空压机更细致的控制,如调整空压机的输出压力等,也无法适应目前任务流模式,也称为智能排程软件在工业生产中的大规模应用。
2、因此,目前空压系统的控制优化还存在以下需要改进的技术方向:
3、细致控制空压机的输出压力:目前的控制方法无法对空压机的输出压力进行精确调整,需要研究更精细的控制方法。
4、适应目前任务流模式:空压系统的控制优化需要适应目前工业生产中的智能排程软件大规模应用,需要研究与智能排程软件的协同控制方法,以实现更高效的生产。
5、减少总能耗:虽然优化空压系统控制可以降低总能耗,但仍需进一步研究控制方法,以实现更大程度的能耗降低,这对于国家双碳战略具有重要意义。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷中的至少一种而提供一种基于任务流的空压系统控制方法,对于任务流可以在考虑开停损失的情况下进行高效地全局优化,也可以针对临时任务进行即时优化,相比以往的空压系统控制优化,做到更细致、更灵活。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供一种基于任务流的空压系统控制方法,包括以下步骤:
4、s1:对用气端任务流模式进行建模,根据空压系统任务流模型,采用改进哈里斯鹰算法对空压系统控制策略进行优化;
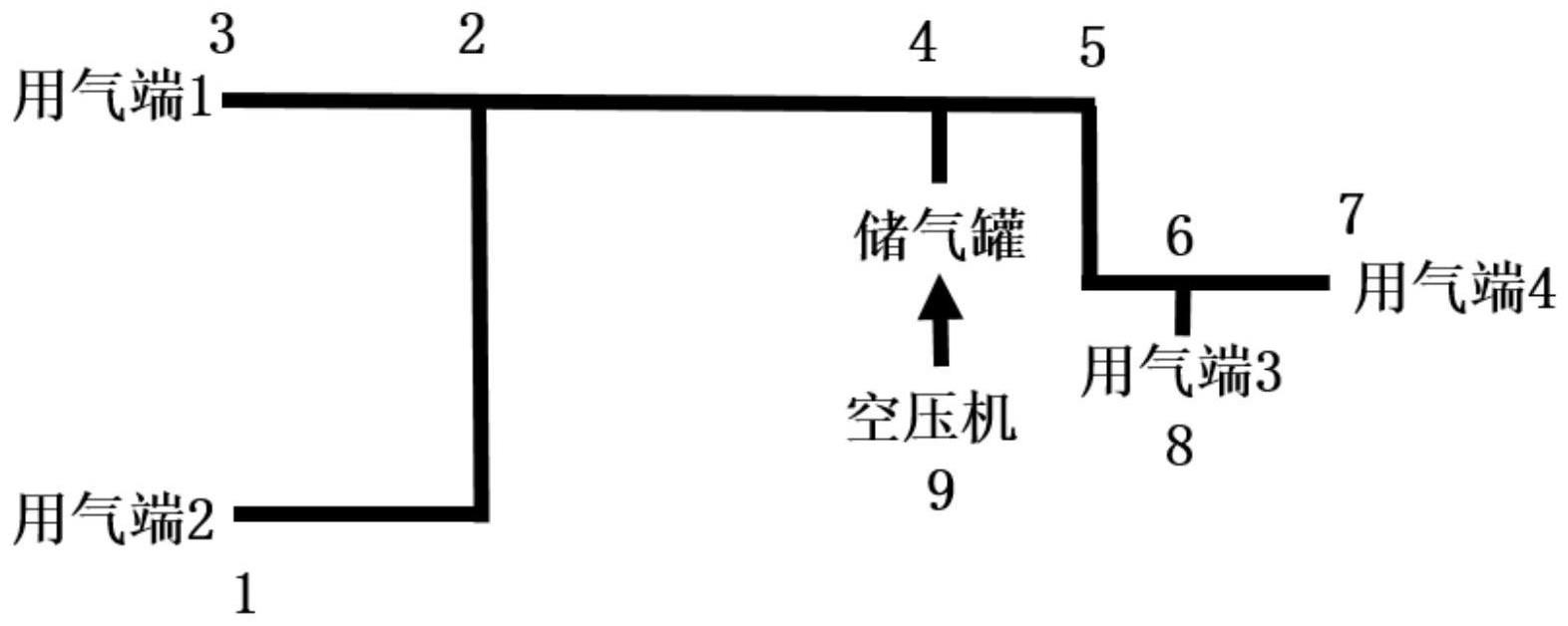
5、s2:构建空压系统模型,其中空压系统由空压机、储气罐、管网三部分组成;
6、s3:初始化改进哈里斯鹰算法的全局变量;
7、s4:通过反向映射优化原始哈里斯鹰的种群初始化;
8、s5:对初始化后的哈里斯鹰种群进行迭代优化;
9、s6:对优化后种群中的个体执行变量隔离下的分区精英主义策略;
10、s7:完成迭代过程,使用历史最佳个体的优化变量去控制空压系统的储气罐输出压力、各个空压机的开停时间与输出压力。
11、进一步地,s1中,对用气端任务流模式进行建模过程中,具体包括:
12、假定某一时刻,某用气端提交用气任务如下:
13、
14、其中,useri表示第i个用气端,表示useri在第j个时刻的用气需求,h表示此时任务流的最大时刻;
15、对1时~h时,有n个用气端的任务流模型如下:
16、
17、进一步地,s2中,构建空压系统模型过程中,包括:
18、根据空压系统管网拓扑结构搭建管网;
19、通过计算单管压降,得到用气端管道输出压力;
20、所述单管压降通过整体法计算,公式如下:
21、
22、其中:
23、
24、
25、
26、
27、其中:q_m为单管结构体参数质量流量,d为单管结构体参数管道内径,ρ为单管结构体参数进气端密度,v为气体速度,nodeinmu为单管结构体参数进气端动力黏度,re为雷诺数,1e6为科学计数法,表示10的6次方,zeta为单管结构体参数局部阻力系数,k为单管结构体参数管内粗糙度,δh为单管结构体参数绝对高差,g为重力常量,取9.8;
28、其中,空压机能耗为:
29、
30、其中,w为空压机能耗,γ为绝热系数,对于空气取1.4,r为气体常数,对于空气取287,tin为进口温度,pin为进口压力,取0.1kpa,ηs为等熵效率,取0.8,pout为出口压力,为空气质量流量。
31、进一步地,s3中,所述哈里斯鹰算法的全局变量包括哈里斯鹰个数search_num、维度dim、变量区间上限ub和下限lb、最大迭代次数max_iter;
32、其中,每一个哈里斯鹰对应为一条空压系统控制策略,所述空压系统控制策略包括储气罐输出压力、空压机开停时间;
33、初始化改进哈里斯鹰算法的全局变量过程中,将空压机输出压力作为优化变量:
34、
35、其中,为优化变量向量,tankn表示n号储气罐,表示n号储气罐的输出压力,cn表示n号空压机,表示n号空压机的开启时间,表示n号空压机的关停时间,表示n号空压机的输出压力;
36、其中,作为时间变量,采用以下小数方式表示:
37、
38、其中,hh=0,…,24,表示小时,mm=0,…,59,表示分钟。
39、进一步地,s4中,通过反向映射优化原始哈里斯鹰的种群初始化的过程中包括:
40、s4-1,依据哈里斯鹰个数search_num、维度dim、变量区间上限ub和下限lb随机生成优化种群,如公式(4)所示:
41、popr=random(search_num,dim)*(ub-lb)+lb(4)
42、其中,pop_r为随机生成的优化种群,random()为随机生成一个0到1区间内的服从于均匀分布的随机小数,random(search_num,dim)为随机生成一个行数为search_num,列数为dim的随机小数矩阵;
43、s4-2,计算popr中每一个个体的适应度值,即每一条空压系统控制策略所产生的总能耗,如公式(5)所示:
44、
45、其中,fitness()为空压系统总能耗计算函数,即适应度计算函数,为popr的第i条控制策略,fitr为随机种群适应度,为第i条控制策略的总能耗,即第i条控制策略的适应度值;
46、根据公式(6)生成反向种群,并根据公式(7)计算反向种群的适应度值,公式(6)如下所示:
47、
48、其中,popo为生成的反向种群;
49、公式(7)为:
50、
51、其中,fito为反向种群适应度,为第i条反向总群的适应度值;
52、s4-3,将随机种群适应度fitr和反向种群适应度fito合并为fitr~o,将随机种群popr和反向种群popo合并为popr~o,r~o表示将反向种群纵向拼接在随机种群之后,对fitr~o进行排序,选取总能耗最低的search_num条控制策略,组合成亟待迭代的初始化种群pop。
53、进一步地,s4中,对初始化后的哈里斯鹰种群进行迭代优化过程中包括:
54、通过公式(8)计算得到的e值的大小选择不同的进化策略:
55、
56、其中,cur_iter为当前迭代次数,e0是一个(-1,1)内的随机数。
57、进一步地,s4中,选择不同的进化策略的过程中:
58、当e的绝对值大于或等于1时,此时个体选择公式(9)所示的进化策略:
59、
60、其中,为进化后代,为当前最佳个体,为当前个体,为随机选择的个体,e为自然常数,q,r1,r2,r3,r4为(0,1)内的随机小数,为当前群体的平均位置,为当前个体与最佳个体的绝对距离,与计算公式如下:
61、
62、
63、进一步地,s4中,选择不同的进化策略的过程中:
64、当e小于1时,执行开发策略,所述开发策略包含具体四种策略,通过一个(0,1)内的随机小数r_select与e值的大小来决定执行哪一种进化策略:
65、(1)r_select大于等于0.5,且e的绝对值大于等于0.5,此时执行公式(10)所示的进化策略;
66、
67、其中,r5为(0,1)内的随机小数,为当前最佳个体和当前个体的距离;
68、(2)r_select大于等于0.5,且e的绝对值小于0.5,此时执行公式(11)所示的进化策略;
69、
70、(3)r_select小于0.5,且e的绝对值大于等于0.5,此时执行公式(12)所示的进化策略;
71、
72、其中,r6为(0,1)内的随机小数;
73、(4)r_select小于0.5,且e的绝对值小于0.5,此时执行公式(13)所示的进化策略;
74、
75、其中,r7为(0,1)内的随机小数。
76、进一步地,s5中,执行变量隔离下的分区精英主义策略过程包括:
77、对于储气罐的输出压力,采用基于乐维飞行的扰动策略,具体采用如下公式:
78、
79、其中,为一个0-1之间的随机小数组成的dim维向量,lf(dim)由下式求得:
80、
81、
82、其中,u,v为0-1之间的随机小数,γ为伽马函数,β取值为1.5;
83、具体执行精英主义策略时,采用如下公式:
84、
85、进一步地,s5中,执行变量隔离下的分区精英主义策略过程还包括:
86、空压机的输出压力采用差分进化策略,对于空压机的输出压力与开停时间,采用差分进化策略,公式如下:
87、
88、其中,ind1,ind2,ind3,ind4,ind5,ind6为0-search_num之间的随机整数;
89、具体执行精英主义策略时,采用如下公式:
90、
91、与现有技术相比,本发明具有以下技术优势:
92、a)空压系统优化变量区间不同,例如储气罐输出压力上下限通常在600-900,而空压机开停时间在0-24,且只有两位小数,因此,空压系统控制优化变量空间是一个不均匀的非连续的变量空间,这意味着原始哈里斯鹰算法所依赖的随机生成初始种群不适用用于空压系统控制优化问题。因为随机生成的初始种群无法均匀分布于不均匀的非连续空压系统控制优化变量空间。随机生成的初始种群会导致原始哈里斯鹰算法在优化过程中种群局限于局部搜索,无法做到真正意义上的全局搜索,造成过早收敛,无法搜索到最低能耗。因此,本发明引入反向映射进行种群初始化,通过反向映射,可以利用优化变量先验信息,将群体均匀地映射在空压系统优化变量空间中,防止群体陷入局部最佳与迭代过早收敛,提升本发明对空压系统控制策略的优化效果。
93、b)在基于任务流的空压系统控制优化的迭代过程中,占用计算时间最多的是适应度计算,即在该控制策略下空压系统总能耗的计算。原始哈里斯鹰算法中,在技术方案s5的(3)(4)中,设置了乐维即时搜索策略,即通过乐维飞行策略即时生成一个新的个体,并计算其适应度值,与当前个体的适应度值进行对比,如果新个体的适应度值小于当前个体的适应度值,即保留乐维飞行策略生成的新个体。但是该方法并不适用于空压系统控制优化。原因如下:
94、(1)乐维飞行策略并不适用于空压系统控制优化。乐维飞行策略本质上是假设优化变量服从于均匀分布,以此生成一系列随机小数以进行局部搜索。但是空压系统控制优化变量空间并不是均匀分布的,因此乐维飞行策略并不适用于空压系统控制优化。
95、(2)原始哈里斯鹰算法中需要在每一次迭代的即时精英主义中计算4次适应度值,这无疑是耗时且低效的,不符合空压系统实际应用场景。
96、因此,本发明基于优化变量的性质对迭代结构进行修改,取消即时精英主义,与其他改进方法搭配使用,化繁为简,提升本发明落地应用的有效性。
97、c)由于空压系统优化变量空间由于变量性质、区间的各不相同,具有非均匀、非连续的特点。据此,本发明提出变量隔离下的差分精英搜索策略,提升进化策略的更新颗粒度,有效解决原始哈里斯鹰算法中乐维飞行策略在非均匀非连续优化变量空间下难以发挥作用的痛点,提升改进哈里斯鹰算法的局部搜索能力。针对储气罐输出压力变量,由于其变量空间具有连续性,且需要随机扰动以进行局部搜索,所以本发明采用乐维飞行以提升储气罐压力变量的局部搜索能力。针对开停时间这种离散变量,本发明采用差分局部搜索策略,以增加空压机开停时间的局部搜索能力。
98、d)本发明提出的任务流模型有助于空压系统控制优化方法的实际落地。在实际工程中,通常是由用气端提交用气任务至空压站,空压站统筹规划空压机、储气罐等设备的各项操作。以往的涉及空压系统控制优化的发明中,并没有考虑实际的任务流情况,这会导致无法及时有效地处理实际工程中的空压系统的优化控制问题。因此,本发明结合实际工程,提出基于任务流的空压系统控制优化,建立空压系统任务流模型,有效解决难以落地的痛点,并且该任务流模型具有较强的可扩展性,可接入自动排程软件。
- 还没有人留言评论。精彩留言会获得点赞!