一种融合信号液压马达故障诊断方法及系统
本发明属于融合信号液压马达故障诊断,尤其涉及一种融合信号液压马达故障诊断方法。
背景技术:
1、液压舵机是航空航天、潜艇和船舶等领域常用的机械设备,对转向和维持稳定性有着至关重要的作用。液压马达作为舵机液压系统的执行元件,其工作性能决定着整个舵机系统的安全稳定的运行,因此,采用简单有效的故障诊断方法对液压系统的正常运行有着重要意义。传统的液压马达故障诊断方法对经验知识的依赖性较强,并且存在故障特征提取困难的问题。有研究者通过采集液压马达运行时的振动信号或声音信号,结合机器学习进行故障诊断。振动信号具有较高的信噪比和灵敏度,声音传感器可非接触采集,且声音信号具有更高的带宽,采集的频率范围更广,常用于故障诊断方法中。zhu和jiang等对液压柱塞泵的振动信号进行监测,并利用小波变换对振动信号进行分解重构提取时域和频域等故障特征,结合卷积神经网络实现了对液压柱塞泵不同故障的分类。wang和liu利用经验模态分解获得振动信号的模态函数分量,进而计算时频矩阵的熵,最后利用随机森林对离心泵进行了故障诊断。加速度传感器的灵敏度是固定值,对早期的故障识别不够精确,且振动信号具有强烈的非线性和非平稳性,对传感器采集信号产生了较大的影响。声音传感器具有无损安装和非接触式测量的优点,且灵敏度更高,被多数学者应用于故障诊断的数据采集中。tang等对基于音频信号分析的机械故障诊断进行了综述,分析了使用音频信号所具有的优点,并总结了基于音频信号故障诊断的发展前景。mian等通过采集不同故障状态下轴承的声音信号并提取信号的音质特征,最后利用支持向量机算法实现了轴承故障诊断。声音信号中包含了很多环境中的干扰噪音,要提高声音信号的信噪比就需要进行分解降噪处理。分解的层数较少难以达到去噪效果,分解层数较多会减少信号中的有用信息,影响诊断准确率。
2、由于液压系统的故障存在不确定性和隐秘性的特点,对故障点的分析较复杂,仅通过单一的信号源或故障特征难以准确识别液压系统存在的故障。为了保证内曲线径向柱塞式液压马达的稳定运行,及时准确的实现故障监测,有学者提出基于多源传感器融合特征的故障诊断方法,并取得了较为理想的效果。li等为检测有杆泵系统的故障类型,提出了一种基于指示图的傅里叶描述子和图形特征的多特征融合故障诊断模型,增强了特征的鲁棒性,并验证了多输入特征融合模型比单输入特征模型的诊断准确率更高。tang等利用液压柱塞泵的振动信号、压力信号和声音信号,结合卷积神经网络(cnn)提出了一种自适应学习率的液压柱塞泵故障诊断方法。通过连续小波变换将三种原始信号转换成二维时频图像,并利用cnn模型识别出了不同的故障类型。karabacak等[9]为降低蜗杆齿轮箱的磨损和故障风险,通过对正常和故障转子的振动、声音和热图像数据进行处理,利用人工神经网络(ann)和支持向量机(svm)对时域、频域和热图像特征进行奇异、对偶或三重形式的提取,实现了对蜗杆齿轮箱的磨损故障诊断。long等提出了一种基于adaboost的多传感器信息驱动电机故障诊断方法。利用希尔伯特变换和傅里叶变换提取所采集电机的电流、磁和振动信号的频域特征,并利用adaboost模型进行训练和诊断。这种故障诊断方法具有较高的鲁棒性和泛化能力。通过上述文献分析可知,利用多信号融合显然比单一信号具有更高的诊断识别准确率,但是对原始信号的处理较复杂,而且结合神经网络和adaboost算法等传统机器学习的故障诊断方法,内存占用较大且运算时间长,故障识别率不高。
3、传统的gbdt和adaboost等机器学习算法是对boosting算法的实现,存在鲁棒性较差和诊断效率低的缺点。xgboost和lightgbm算法是基于gbdt算法的提升,梯度提升树算法解决了传统算法训练时间长、故障识别率低的问题,是目前使用最广泛的故障诊断方法。xiang和wang等分别利用快速傅里叶换和支持向量机算法对原始数据进行处理,进而结合xgboost模型对特征重要度排序和诊断,提高了对滚动轴承故障诊断的准确率。wu和zhang等为提高风力发电机故障诊断的准确性和可靠性,建立了xgboost故障识别模型,并将诊断结果与支持向量机和adaboost算法进行了对比,结果表明xgboost算法具有更高的分类准确率。上述学者的研究表明xgboost算法比传统机器学习算法具有更高的故障诊断准确率,并且广泛应用于各类机械设备的故障诊断中。但是xgboost算法遍历数据的方式限制了运算的速度,降低了故障诊断的效率。而lightgbm算法能够在保证准确率的情况下提升数据运算的效率,并被广泛应用于齿轮箱、滚动轴承和液压马达的故障诊断中。tang等针对传统机器学习算法在风力发电机齿轮箱故障诊断中效率和精度低的问题,研究了lightgbm算法在风电齿轮箱故障诊断中的应用。进一步证实了lightgbm算法比传统算法的检测精度更高,并且具有更低的误报率和漏检率。guo等将小波降噪算法和lightgbm模型结合对液压马达基座螺栓松动故障进行了诊断,并和传统机器学习算法进行对比,结果显示lightgbm算法具有更高的诊断效率。xu等为解决传统的基于深度学习算法的故障诊断模型训练时间长、诊断效率低等问题,提出了一种卷积神经网络和lightgbm相结合的滚动轴承故障诊断方法。并通过构造数据集验证了lightgbm模型的诊断效率和准确率优于其他模型。
4、从上述文献可知,振动传感器的灵敏度是固定值,对早期的故障识别不够精确,且振动信号具有强烈的非线性和非平稳性,对传感器采集信号产生了较大的影响。声音信号中包含了很多环境中的干扰噪音,要提高声音信号的信噪比就需要进行分解降噪处理。分解的层数较少难以达到去噪效果,分解层数较多会减少信号中的有用信息,影响诊断准确率。采用单信号进行故障诊断识别率不高,而采用信号融合方法可将两种传感器的优点结合起来,利用不同传感器对故障敏感频段以提高故障识别率。对于现有的多源传感器融合的方法,有文献证实了比单信号特征模型具有更高的诊断效果。但对于原始数据的转换和特征的提取较为麻烦,而且多是基于传统的gbdt和adaboost算法进行的故障识别,这种方法故障诊断模型训练时间长、诊断效率低。
5、通过上述分析,现有技术存在的问题及缺陷为:
6、仅通过单一的信号源或故障特征识别液压马达的故障,受制于液压马达系统故障存在的不确定性和隐秘性特点,故障识别结果准确性差;
7、采用单一信号源结合gbdt和adaboost等机器学习算法开展液压马达故障识别,诊断过程鲁棒性和效率均较低。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种融合信号液压马达故障诊断方法。
2、本发明是这样实现的,一种融合信号液压马达故障诊断方法包括:
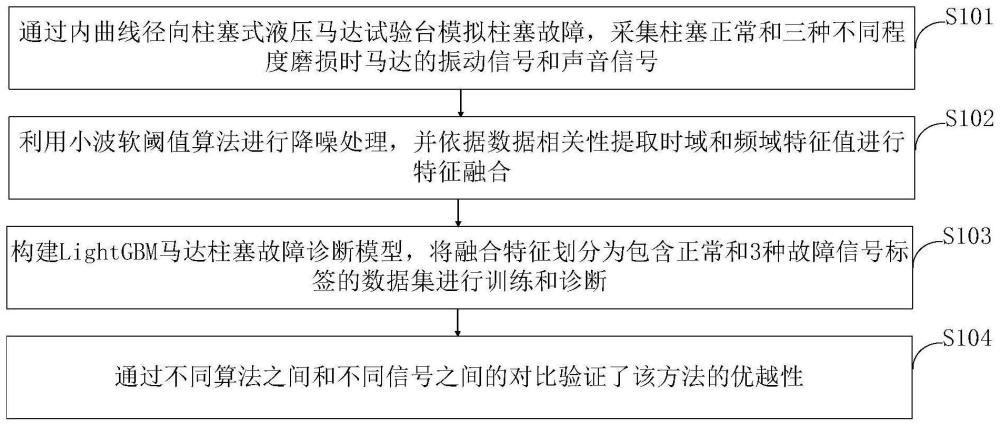
3、步骤一,通过内曲线径向柱塞式液压马达试验台模拟柱塞故障,采集柱塞正常和三种不同程度磨损时马达的振动信号和声音信号;
4、步骤二,利用小波软阈值算法进行降噪处理,并依据数据相关性提取时域和频域特征值进行特征融合;
5、步骤三,构建lightgbm马达柱塞故障诊断模型,将融合特征划分为包含正常和3种故障信号标签的数据集进行训练和诊断;
6、步骤四,通过不同算法之间和不同信号之间的对比验证了该方法的优越性。
7、进一步,所述通过内曲线径向柱塞式液压马达试验台模拟柱塞故障方法如下:
8、内曲线径向柱塞液压马达其结构主要由定子、转子、输出轴、柱塞和滚珠组成;定子曲线由6个均匀分布的作用弧段组成,10个柱塞等间距分布于转子周围;当马达工作时,高压油通过配油轴进入到转子高压腔,产生较大的压力推动柱塞沿轴径向向外伸出,使滚珠与内曲线导轨接触产生相互作用力,其中切向分力带动转子连续旋转而输出扭矩;同时将处于低压区柱塞腔内的液压油通过配油轴低压油口排出,通过不断地通入高压油排出低压油来实现马达连续工作;
9、定子和转子之间的振动主要是由柱塞组件引起的,由柱塞马达结构图可知,有2个柱塞是处于同一个位置,典型的振动频率主要为:
10、
11、式中,n为液压马达的转速,p为内曲线的个数,q为柱塞的个数;对于其中一个柱塞的频率可表示为
12、
13、进一步,所述依据数据相关性提取时域和频域特征值进行特征融合方法如下:
14、(1)特征选取
15、经过去噪后的信号在python中进行数据相关性可视化处理,依据特征重要度从振动信号和声音信号数据中共选取了均值、均方根、峰值指标、标准差、波形指标、脉冲指标等6种时域特征和幅值谱均值、幅值谱标准差、频率重心、谱幅值偏斜度、频率标准差、频率偏斜度等6种频域特征;
16、(2)模型评估方法
17、混淆矩阵是评价模型性能的常用指标,它能反映预测结果和真实情况之间的关系,模型评估中常选用accuracy、precision、recall和f1-score等4种指标进行评价;
18、各评价指标表达式为:
19、
20、
21、
22、
23、pr曲线roc曲线是用于评估分类器性能的技术和工具,它可以计算预测结果的准确性和可靠性;在pr曲线中,是将recall和precision绘制在同一条曲线上;roc曲线通过将分类器的真正率(tpr)和假正率(fpr)绘制在一条曲线上,可直观地比较分类器的性能;tpr和fpr可表示为:
24、
25、
26、(3)诊断方法流程
27、试验台搭建与信号采集:搭建内曲线径向故障诊断试验台,对柱塞进行三种不同深度磨损,利用振动加速度传感器和pcb声音传感器采集不同故障时马达的振动和声音信号;
28、信号去噪与特征提取:分别对振动信号和声音信号利用小波算法进行去噪,并利用数学方法提取时域和频域特征;
29、信号特征融合:采用特征融合方法将振动信号和声音信号的特征值进行融合;
30、模型训练与故障诊断:将振动信号数据、声音信号数据和融合信号特征数据集分别划分为训练集和测试集,输入到故障诊断模型中进行训练和诊断,并设置最大深度防止出现过拟合。
31、进一步,所述采集柱塞正常和三种不同程度磨损时马达的振动信号和声音信号方法如下:
32、1)实验方法;
33、2)数据处理;
34、3)特征选取。
35、进一步,所述实验方法:
36、本发明搭建了内曲线径向柱塞式液压马达故障诊断实验平台,模拟柱塞结构不同磨损深度的故障类型,该试验台由故障模拟系统和数据采集系统组成:
37、柱塞故障模拟试验台,利用内曲线径向柱塞式液压马达模拟故障,pcb声音传感器安装在液压马达外侧25cm处,振动加速度传感器以磁吸的方式安装在液压马达的后端盖上,x轴与马达的径向相同,转速传感器安装在液压马达轴向外侧4mm处;
38、数据采集系统,pc端通过以太网连接数据采集卡接收和储存数据;转速显示仪可以实时显示液压马达的转速,保证每次实验的转速相同,排除无关因素的干扰,提高实验结果的准确性;实验时通过伺服控制系统控制液压油源供给稳定的流量,保证液压马达转速稳定在300r/min;设置数据采集系统的采样频率为2000hz,采集柱塞正常和三种不同程度磨损故障时的振动和声音信号,每组实验数据采集6分钟。
39、进一步,所述数据处理方法:
40、通过振动传感器和声音传感器获取的实验数据通常包含有噪声信号的干扰,尤其声音传感器的检测频率低,对环境中的声音较为敏感;因此,依据柱塞磨损故障信号的特点,选用小波软阈值算法对振动和声音信号进行分解与重构,以达到对原始信号的去噪效果;软阈值函数可表示为:
41、
42、通过小波软阈值去噪后的信号为时域信号,为更好的观察信号的特点和提取频域特征,选择快速傅里叶变换(fft)将信号变换为频域表示,其傅里叶变换及其逆变换公式分别为:
43、
44、
45、通过频域对比可以看出,经过小波软阈值去噪后信号中的毛刺减少,从而反应了信号的清洁度得到了提高,达到了去噪效果;本发明采用内曲线径向柱塞式液压马达,柱塞数量为10,壳体内曲线为6,实验转速为300r/min;从图6的对比中可以看出,振动传感器对液压马达转速的半倍频较为敏感,声音传感器对液压马达转速的一倍和二倍频率较为敏感,且对单个柱塞的频率响应效果更好;考虑到振动传感器和声音传感器对柱塞故障具有不同的响应频率,本发明结合振动和声音信号各自的优点,对两种信号的特征值进行融合,以此提高对液压马达柱塞故障的诊断精确度。
46、进一步,所述特征选取方法:
47、利用内曲线径向柱塞液压马达实验台模拟柱塞故障,采集柱塞不同状态下的振动和声音信号;采集频率设置为2000hz,每组数据采集6分钟,每组数据共720000个采样点,依次选取4000个采样点生成一个样本,共有180个样本,训练集和测试集的样本数量分别为80%和20%;
48、时域和频域特征是反应液压马达运行状态的常用指标;利用振动和声音传感器采集柱塞正常和不同磨损时的信号,经过小波软阈值去噪后,采用数学方法分别提取每组数据的时域和频域特征值各11类;生成振动信号和声音信号特征值数据集,并进行数据集相关性分析:
49、数据相关性热力图反应了数据之间的关联信息,图中正相关和负相关数值越大越能反应液压马达运行状态信息;依据热力图选取了均方根值、方根幅值、标准差、峰值指标、波形指标、谱幅值均值、谱幅值标准差、谱幅值偏斜度、谱幅值峭度、频率偏斜度等10类振动信号特征值;选取了均方根值、方根幅值、峰值、标准差、峰值指标、脉冲指标、谱幅值均值、谱幅值标准差、频率重心、频率标准差等10类声音信号特征值;最后将每组正常和故障特征值按照对应的数据标签进行横向融合,不改变样本数量,只增加了数据集长度。
50、进一步,所述将融合特征划分为包含正常和3种故障信号标签的数据集进行训练和诊断方法:
51、(1)数据预分类与可视化;
52、(2)模型评估。
53、进一步,所述数据预分类与可视化方法:
54、为了预先观察融合信号数据相对于振动和声音信号的分类效果,利用t-sne算法将数据进行可视化处理;从图中可以看出,振动信号的分类具有一定的聚集性,但聚集点太多,没有将同类别的样本聚集在一起;对声音信号的分类离散性较强,不同类型的数据点融合在了一起,分类效果较差;对于融合信号的分类可以看出,不同类型的数据点几乎完全分开,样本之间的交叉点少,分类效果更好。
55、进一步,所述模型评估方法:
56、adaboost算法是在boosting算法的基础上的改进,具有较高的有效性和实用性;gbdt算法是一种梯度提升迭代决策树算法,xgboost和lightgbm算法是基于gbdt的改进,也是最受欢迎的决策树提升算法,具有更高的学习效率;本发明通过对比四种算法分别对融合信号、振动信号和声音信号的分类精确度,来验证lightgbm算法的高效性和对融合信号数据的分类效果;
57、不同模型的诊断结果,传统的adaboost算法分效果较差,对三种数据集的诊断精确度都低于其他三种算法10%以上;gbdt、xgboost和lightgbm算法对三种数据集的分类效果相差不大,但lightgbm算法的诊断精确度要高0.17%-0.33%,并且三种算法对融合数据集的诊断结果精确度更高,adaboost算法的训练时间最短,但是它的诊断精确度较低;gbdt、xgboost和lightgbm算法诊断精确度相差不多,但lightgbm比gbdt和xgboost算法的训练时间分别缩短了6倍和3倍,因此,lightgbm算法具有更高的诊断精确度和更高的效率;
58、利用小波软阈值算法对振动信号和声音信号进行去噪处理,提取特征值依据数据标签对应融合,生成融合信号数据集,每种数据集包含正常和三种故障类型,但不改变样本数量;lightgbm模型对融合信号、振动信号和声音信号的故障诊断结果,并引入accuracy、precision、recall和f1-score作为分类性能的评价指标;利用lightgbm模型对三种数据集进行训练和诊断,通过对比可以看出对融合数据集的诊断精确度比振动和声音信号分别提高4.86%和14.59%;对融合数据集precision、recall和f1-score的诊断结果也都比振动和声音数据集提高了4.5%-13.25%不等;
59、roc和pr曲线是用于评估机器学习算法对一个给定数据集的分类性能,每个数据集都包含固定数目的正样本和负样本,曲线下的面积越大说明机器学习算法对数据集的分类性能越好;fpr是指实际为负样本被预测为正样本的概率,tpr是指实际为正样本被预测为负样本的概率;precision是指被预测为正的样本占正样本的比例,recall是指正样本中被预测为正样本的比例;基于lightgbm算法对振动、声音和融合信号数据集的分类效果,lightgbm算法对声音数据集的分类效果最差,对融合数据集的分类效果远高于振动和声音数据集。
60、本发明的另一目的在于提供一种融合信号液压马达故障诊断系统,包括:
61、故障模拟组件:包括一个内曲线径向柱塞式液压马达试验台,用于模拟柱塞的正常状态和不同程度的磨损故障,并采集相应的振动和声音信号;
62、信号处理组件模块:利用小波软阈值算法对采集到的信号进行降噪处理,提高信号质量以供后续分析;
63、特征提取与融合模块:基于数据相关性分析,从处理后的时域和频域信号中提取特征值,并进行特征融合,形成用于故障诊断的综合特征集;
64、故障诊断模型模块:构建一个基于lightgbm算法的马达柱塞故障诊断模型,使用包含正常及三种故障信号标签的融合特征数据集进行模型训练和诊断;
65、性能验证组件模块:包含用于评估和验证诊断模型性能的工具,如混淆矩阵、pr曲线和roc曲线,以及进行不同算法和信号类型的对比分析,验证所提方法的有效性和优越性。
66、进一步,包括一个内曲线径向柱塞式液压马达试验台,用于模拟柱塞的正常和不同程度的磨损故障,同时配备振动和声音信号采集装置,用于采集马达在各种状态下的相应信号。
67、进一步,包括一个信号处理模块,利用小波软阈值算法对采集的振动和声音信号进行降噪处理,提高信号质量以便于更准确地进行故障诊断。
68、进一步,包括一个特征提取和融合模块,用于基于数据相关性分析,从降噪后的振动和声音信号中提取时域和频域特征值,并进行特征融合,形成用于故障诊断的综合特征集。
69、进一步,包括一个基于lightgbm算法的马达柱塞故障诊断模型构建模块,用于训练和诊断包含正常和三种故障信号标签的融合特征数据集,从而实现对液压马达柱塞故障的精确诊断。
70、进一步,包括一个模型评估与验证模块,利用混淆矩阵、pr曲线和roc曲线等评估工具,对诊断模型的性能进行评估和验证,包括准确性、精确度、召回率和f1-score等指标的计算,以及通过不同算法和信号类型的对比分析,验证诊断方法的优越性。
71、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
72、第一、本发明提供的一种融合信号液压马达故障诊断方法。通过内曲线径向柱塞式液压马达试验台模拟柱塞故障,采集柱塞正常和三种不同程度磨损时马达的振动信号和声音信号,利用小波软阈值算法进行降噪处理,并依据数据相关性和特征重要度进行特征选择,提取时域和频域特征值进行特征融合。构建lightgbm马达柱塞故障诊断模型,将融合特征划分为包含正常和3种故障信号标签的数据集进行训练和诊断,最后通过不同算法之间和不同信号之间的对比验证了该方法的优越性。本发明提出的融合特征的故障诊断方法,解决了使用单一传感器采集数据诊断精确度不高的问题,使用两种不同的信号进行诊断,可将不同传感器的故障信息结合,增加故障特征以提高故障识别率。采用lightgbm建立故障诊断模型,在保证分类精度的前提下,既减少了运行内存占用又提高了模型训练时间,极大提高了故障诊断效率。
73、结果显示:lightgbm算法比adaboost、gbdt和xgboost算法诊断精确度提升了0.17%-0.33%;lightgbm模型下对融合信号的诊断比振动和声音信号的诊断精确度分别提高了4.86%和14.59%。
74、第二,本发明提供的一种融合信号液压马达故障诊断方法。通过内曲线径向柱塞式液压马达试验台模拟柱塞故障,采集柱塞正常和三种不同程度磨损时马达的振动信号和声音信号,利用小波软阈值算法进行降噪处理,并依据数据相关性和特征重要度进行特征选择,提取时域和频域特征值进行特征融合。构建lightgbm马达柱塞故障诊断模型,将融合特征划分为包含正常和3种故障信号标签的数据集进行训练和诊断,最后通过不同算法之间和不同信号之间的对比验证了该方法的优越性。本发明提出的融合特征的故障诊断方法,解决了使用单一传感器采集数据诊断精确度不高的问题,使用两种不同的信号进行诊断,可将不同传感器的故障信息结合,增加故障特征以提高故障识别率。采用lightgbm建立故障诊断模型,在保证分类精度的前提下,既减少了运行内存占用又提高了模型训练时间,极大提高了故障诊断效率。
75、结果显示:lightgbm算法比adaboost、gbdt和xgboost算法诊断精确度提升了0.17%-0.33%;lightgbm模型下对融合信号的诊断比振动和声音信号的诊断精确度分别提高了4.86%和14.59%。
76、第三,本发明的技术方案转化后的预期收益和商业价值为:a)受制于液压马达系统故障的不确定性和隐秘性特点,仅通过单一的信号源或故障特征难以准确识别液压马达存在的故障。融合信号故障诊断方法结合了声音和振动传感器各自的优点,包含的故障信息量更多,特征提取和融合更简单、诊断结果更可靠;b)选取声音和振动信号中影响因素最大的均方根、标准差等10个特征值,采用同类标签拼接进行特征融合形成新的特征向量,样本向量故障信息含量更高、更明显;c)利用融合样本向量结合lightgbm算法模型,能够进行多线程并行计算,节省了计算机内存的占用,并极大的降低了诊断时间,提高了对柱塞马达的故障识别性能。
77、本发明的技术方案填补了国内外业内技术空白:a)本发明提供了一种基于lightgbm算法识别声音-振动融合信号特征的内曲线柱塞式液压马达柱塞磨损故障的诊断方法,为柱塞式液压马达的故障诊断开辟了一条可行的技术路线;b)基于机器学习的故障诊断方法被广泛应用于轴承和齿轮等旋转机械中,但是对于柱塞马达尤其是内曲线径向柱塞式液压马达的诊断,在现有国内外的文献中未见有应用。
78、第四,本发明提供的融合信号液压马达故障诊断方法的显著技术进步可以概括如下:
79、1.故障模拟与实验数据的精准获取
80、故障模拟的真实性:通过内曲线径向柱塞式液压马达试验台模拟柱塞故障,可以精准地模拟实际工作中出现的故障情况,从而获得更接近真实情况的试验数据。
81、多维度数据采集:采集振动信号和声音信号,结合两种不同的信号类型,提高了故障诊断的准确性和可靠性。
82、2.高效的信号处理和特征融合
83、去噪算法的应用:使用小波软阈值算法进行降噪处理,有效去除信号中的噪声,提高了信号的质量。
84、特征融合的创新:利用时域和频域特征值进行特征融合,增强了模型的诊断能力,确保了故障诊断的全面性和深度。
85、3.利用先进的机器学习模型
86、lightgbm模型的应用:构建基于lightgbm的马达柱塞故障诊断模型,该模型具有高效率和高精度的特点,适用于处理大规模数据。
87、模型训练与诊断的优化:将融合特征划分为包含正常和3种故障信号标签的数据集进行训练,提高了模型的泛化能力和诊断准确率。
88、4.系统性能的全面验证
89、综合算法比较:通过不同算法之间的对比,验证了所提方法的优越性,确保了方法的先进性和有效性。
90、信号类型的综合分析:不同信号之间的对比分析进一步验证了特征融合在提高诊断准确性方面的重要性。
91、本发明提供的融合信号液压马达故障诊断方法的显著技术进步主要体现在提高故障诊断的准确性、可靠性和效率方面,通过综合利用多种信号、先进的信号处理方法和机器学习模型,显著提升了液压马达故障诊断的性能。
- 还没有人留言评论。精彩留言会获得点赞!