油缸连接结构及液压泵控腿足机器人的制作方法
本申请涉及机器人,尤其是涉及一种油缸连接结构及液压泵控腿足机器人。
背景技术:
1、随着智能装备发展,机器人在人们工作生活中应用越来越广泛。机器人有轮式和腿足式,其中腿足式机器人由于对地形的适应性更好,因此在巡检等场景应用广泛。
2、相关技术见申请号为202222609655.1的专利,其公开了一种液压泵控防爆四足机器人,包括液压结构和机械结构;机械结构包括防爆仓和腿足组件,腿足组件包括侧摆单元、髋单元和膝单元;液压结构包括蓄能器和驱动单元,驱动单元包括依次连接的伺服电机、液压泵和液压缸;每个侧摆单元、髋单元或膝单元分别由一个驱动单元进行控制。
3、针对上述相关技术,液压泵与液压缸之间通过柔性油管连接,机器人在行走过程中柔性油管可能发生缠绕或被外界异物钩挂,影响机器人的稳定运行。
技术实现思路
1、为了改善目前液压泵控机器人的油管可能发生缠绕或被外界异物钩挂而影响机器人稳定运行的问题,本申请提供一种油缸连接结构及液压泵控腿足机器人。
2、第一方面,本申请提供的一种油缸连接结构采用如下的技术方案:
3、一种油缸连接结构,包括板体、液压泵和油缸,液压泵、油缸分别与板体固定连接,板体开设有贯穿性的出油孔和进油孔,出油孔和进油孔用于直接连通液压泵和油缸。
4、通过采用上述技术方案,液压泵和油缸通过设计在板体上的出油孔和进油孔连通,取消了油管的使用,减少出现油管缠绕的可能性。由于利用进出油孔取代了原来的油管,减少了液压油的传动距离,提升油缸相应速度。此外,还能够增加机器人在易燃易爆环境下工作的防爆性能。
5、第二方面,本申请提供的一种液压泵控腿足机器人采用如下的技术方案:
6、一种液压泵控腿足机器人,包括控制总成和腿足总成,控制总成包括舱体、控制单元和液压泵,腿足总成包括油缸,舱体侧壁开设有贯穿性的出油孔和进油孔,出油孔和进油孔用于直接连通液压泵和油缸。
7、通过采用上述技术方案,控制单元控制液压泵对油缸进行供油作业,油缸带动腿足总成运动,从而合适的机器人移动行走。由于液压泵和油缸通过舱体侧壁的出油孔和进油孔直接连通,减少了油管的使用,降低了机器人行走过程中油管缠绕或被异物钩挂引起的运行故障可能性,提高了机器人运行稳定性。由于利用进出油孔取代了原来的油管,减少了液压油的传动距离,提升油缸相应速度。此外,还能够增加机器人在易燃易爆环境下工作的防爆性能。
8、综上,本申请包括以下有益技术效果:1、通过舱体侧壁的出油孔和进油孔直接连通液压泵和油缸,减少了油管的使用,降低了机器人行走过程中油管缠绕或被异物钩挂引起的运行故障可能性,提高了机器人运行稳定性;2、由于利用进出油孔取代了原来的油管,减少了液压油的传动距离,提升油缸相应速度。
技术特征:
1.一种油缸连接结构,包括板体、液压泵和油缸,液压泵、油缸分别与板体固定连接,其特征在于:板体开设有贯穿性的出油孔和进油孔,出油孔和进油孔用于直接连通液压泵和油缸。
2.根据权利要求1所述的油缸连接结构,其特征在于:出油孔和进油孔两端周围设有密封圈。
3.根据权利要求2所述的油缸连接结构,其特征在于:板体位于出油孔和进油孔的端部设有用于放置密封圈的密封槽。
4.根据权利要求1-3任一所述的油缸连接结构,其特征在于:出油孔和/或进油孔垂直于板体设置。
5.根据权利要求1-3任一所述的油缸连接结构,其特征在于:出油孔和/或进油孔与板体的法线呈锐角夹角设置。
6.根据权利要求4所述的油缸连接结构,其特征在于:出油孔和进油孔至少有两组。
7.根据权利要求5所述的油缸连接结构,其特征在于:出油孔和进油孔至少有两组。
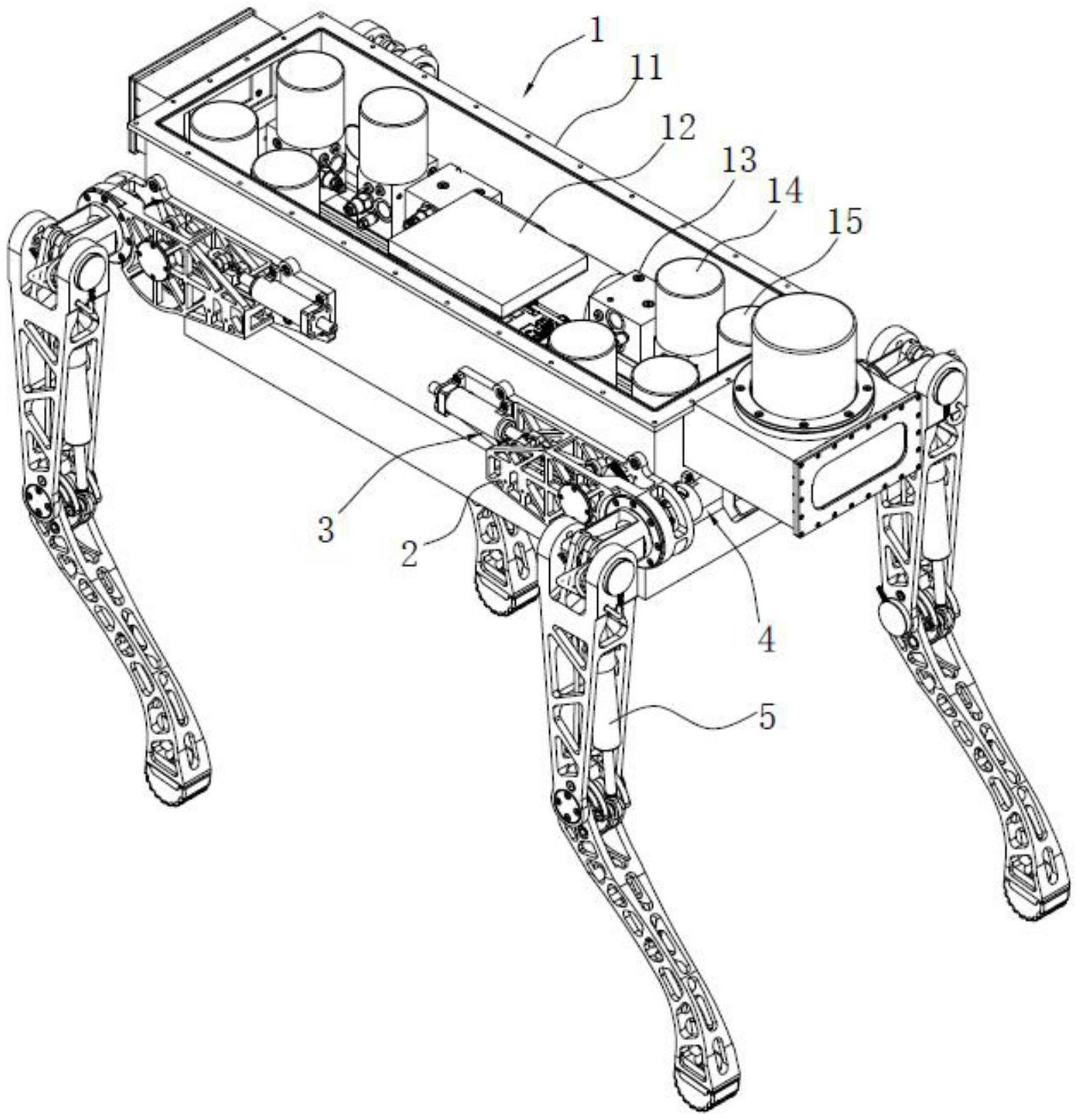
8.一种液压泵控腿足机器人,包括控制总成(1)和腿足总成,控制总成(1)包括舱体(11)、控制单元(12)和液压泵,腿足总成包括油缸,其特征在于:舱体(11)侧壁开设有贯穿性的出油孔和进油孔,出油孔和进油孔用于直接连通液压泵和油缸。
9.根据权利要求8所述的液压泵控腿足机器人,其特征在于:还包括安装支架(2),腿足总成通过安装支架(2)与舱体(11)连接。
10.根据权利要求9所述的液压泵控腿足机器人,其特征在于:安装支架(2)上开设有用于与出油孔和进油孔连通的油道。
技术总结
本申请涉及一种油缸连接结构及液压泵控腿足机器人,涉及机器人技术领域,油缸连接结构包括板体、液压泵和油缸,液压泵、油缸分别与板体固定连接,板体开设有贯穿性的出油孔和进油孔,出油孔和进油孔用于直接连通液压泵和油缸;液压泵控腿足机器人包括控制总成和腿足总成,控制总成包括舱体、控制单元和液压泵,腿足总成包括油缸,舱体侧壁开设有贯穿性的出油孔和进油孔,出油孔和进油孔用于直接连通液压泵和油缸。该申请具有减少油管使用以提高机器人运行稳定性的优点。
技术研发人员:朱冬,胡小东,唐国梅,陈大文,王镇,王力,陈超
受保护的技术使用者:七腾机器人有限公司
技术研发日:20230214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!