一种泵阀一体装置的制作方法
本技术涉及液压控制,具体为一种泵阀一体装置。
背景技术:
1、移动机器人作为一种发展较为成熟的机器人,不仅可以降低人类的工作强度,且可以代替人类完成危险的工作,其中轮式和履带式巡检机器人已经得到广泛应用,但它们只能在相对平坦的地面环境移动,而石油、化工、电力等行业巡检场景中存在崎岖不平的路面、楼梯、障碍等,限制了轮式和履带巡检机器人的移动,相较于轮式、履带式等其他移动方法,多足机器人在行走过程中仅需离散的落足点,且能像多足步行动物一样行走于具有障碍物的崎岖路面上,具有较强的复杂路面适应性。因此多足步行机器人能得到较快地发展与较为广泛地应用。
2、多足机器人的结构,通常包括躯干及多个液压机械腿,如专利号为cn202222609650.9的一种四足机器人液压泵缸控驱动系统,其公开了四足机器人的侧摆单元、髋单元、膝单元、伺服电机、液压泵、液压缸蓄能器,蓄能器通过管道与液压泵、液压缸连接。该系统中的液压缸采用了有杆腔油口和无杆腔油口的非对称液压缸,在工况下液压缸内的容积不同,进油和回油时流量不同,需要由双液控单向阀及大蓄能器组成的补油回路,这增加了液压系统回路设计的难度,增加液压系统体积。
3、另外,经过研究分析:机器人腿部关节主要分为髋侧摆关节,髋旋转关节以及膝旋转关节。地面环境可分为平地、斜坡、楼梯等三种环境,无论在哪一种环境下,足式机器人都存在四足触地调整姿态的工况,对于机器人躯干来讲是质心姿态在空间六个自由度方向上的调整,而对于髋侧摆、髋旋转以及膝旋转等三种不同的关节,由于所处的关节位置的不同,在四足触地调整姿态时其各自对应的负载工况也不同,其中髋侧摆和髋俯仰由于均在躯干上,所对应的工况类似,而膝关节液压缸其安装于腿上,工况与其他两种液压缸不同。如图10所示的四足机器人关节应用工况下以负载力f及液压缸活塞杆速度v组成的平面坐标系中,髋侧摆关节和髋俯仰关节的负载力、速度会在四个象限中变化,工况较为复杂,而膝旋转关节液压缸的负载工况集中在一、二、三、四象限,基于以上分析可知,在四足机器人不同姿态调整的工况需求下,其液压系统回路原理复杂程度高,这也导致了上述专利的液压系统体积大,整体产品体积过于庞大,不便于负重和应用。
4、为此,如何提供一种液压系统组成简单、体积小的泵阀一体单元成为有待解决的问题。
技术实现思路
1、为解决现有技术中存在的液压系统复杂、体积大、不便负重和应用的问题,提出以下技术方案:
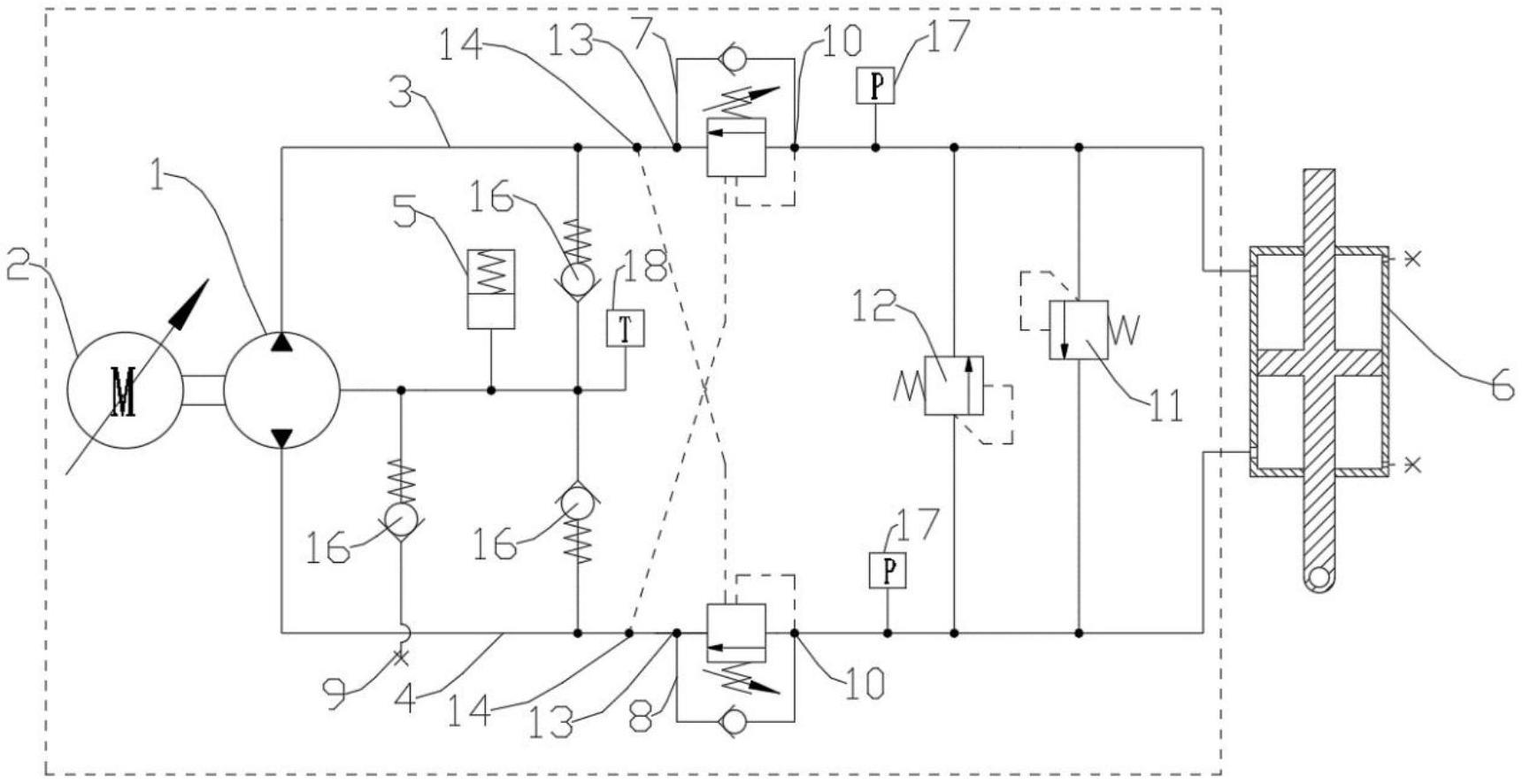
2、本实用新型提供了一种泵阀一体装置,包括阀体、双向泵、用于驱动双向泵旋转的电机以及位于阀体内的主油路一、主油路二、单向平衡阀一、单向平衡阀二,电机与阀块连接;在阀体上设有用于安装双向泵的安装端面、进出油口a、进出油口b、用作充油口的充油孔;单向平衡阀一和单向平衡阀二的第一阀口分别用于与对称执行单元的油口一和油口二连通;单向平衡阀一和单向平衡阀二的第二阀口分别与主油路一和主油路二的进油口连通;单向平衡阀一的控制阀口与单向平衡阀二的第二阀口前段的主油路二连通;单向平衡阀二的控制阀口与单向平衡阀一的第二阀口前段的主油路一连通;双向泵的两个吸压油口分别通过进出油口a、进出油口b与主油路一、主油路二连通,充油孔通过单向阀与双向泵连通。
3、较优的,阀体内还设有蓄能器,阀体上设有用作双向泵泄漏油口的泄油孔,单向平衡阀一的第一阀口通过溢流阀与单向平衡阀二的第一阀口双向连通;蓄能器通过单向阀分别与单向平衡阀一和单向平衡阀二的第二阀口连通;泄油孔与蓄能器连通;充油孔通过单向阀与蓄能器连通。
4、较优的,双向泵为齿轮泵,齿轮泵包括相互啮合的主动齿轮和从动齿轮,主动齿轮和从动齿轮对应安装在安装端面处;电机的传动轴与齿轮泵的主动齿轮传动连接;主动齿轮和从动齿轮的外侧设有齿轮端盖和轴套;轴套之间、泄油孔之间分别相连通,齿轮端盖内腔、轴套内腔、泄油孔内腔均与蓄能器连通。
5、较优的,在阀体上分别设有用于安装单向平衡阀一和单向平衡阀二的阀孔一和阀孔二,阀孔一设有与单向平衡阀一的第一阀口、第二阀口、控制阀口对应构成的油腔一、油腔二和油腔三,阀孔二设有与单向平衡阀二的第一阀口、第二阀口、控制阀口对应构成油腔一、油腔二和油腔三;油腔一均设有a1口、a2口和a3口;油腔二均设有b1口和b2口;油腔三上设有c口;阀孔一和阀孔二上的的a1口分别用于与对称执行单元的油口一和油口二连通。
6、阀孔一和阀孔二的b1口分别与主油路一和主油路二的进油口连通;
7、阀孔一的a2口通过溢流阀与阀孔二的a2口连通;
8、阀孔二的a3口通过溢流阀与阀孔一的a3口连通;
9、阀孔一的b1口与阀孔二的c口连通;阀孔二的b1口与阀孔一的c口连通;蓄能器分别通过单向阀与阀孔一和阀孔二b2口连通。
10、较优的,阀孔一和阀孔二的套孔位于阀体的侧面,单向平衡阀一和单向平衡阀二与阀孔一和阀孔二为拔插式连接。
11、较优的,蓄能器为弹簧式蓄能器、活塞式蓄能器或耐油弹性体式蓄能器。
12、较优的,还包括分别与单向平衡阀一和单向平衡阀二的第一阀口连接的压力传感器。
13、较优的,还包括分别与主油路一和主油路二连接的温度传感器。
14、本实用新型的工作原理在于:本装置内部采用了eha闭式液压系统,可用于驱动对称执行单元,不需要由双液控单向阀及大蓄能器组成的补油回路,简化了回路原理。当双向泵顺时针旋转时,从双向泵出来的油液经过单向平衡阀一的第二阀口、第一阀口进入对称执行单元的上腔,如果对称执行单元带载,则此时此路为高压油。在对称执行单元下腔回油路上,需要单向平衡阀一的第二阀口前段油路高压的液压油压力控制打开单向平衡阀二的控制阀口时,油液才能由单向平衡阀二的第一阀口、第二阀口流回双向泵,一旦对称执行单元上腔的压力低于单向平衡阀二控制阀口的开启压力,则单向平衡阀二的控制阀口就不会被打开此时对称执行单元保持位置。
15、当双向泵逆时针旋转时,从双向泵出来的油液经过单向平衡阀二的第二阀口、第一阀口进入对称执行单元的下腔,如果对称执行单元带载,则此时此路为高压油。在对称执行单元上腔回油路上,就需要单向平衡阀二的第二阀口前段油路的高压的液压油压力控制打开单向平衡阀一的控制阀口时,油液才能由单向平衡阀一的第一阀口、第二阀口流回双向泵,一旦对称执行单元下腔的压力低于单向平衡阀一控制阀口的开启压力,则单向平衡阀一的控制阀口就不会被打开此时对称执行单元保持位置,同时单向平衡阀二也处于单向流动状态或处于关闭状态,此时系统电机可以停转,对称执行单元可以在任何行程范围内保持位置。
16、单向平衡阀一与单向平衡阀二之间双向连接的溢流阀起到保护作用,用于限制系统压力不超过一定的值;用于防止系统超压,一侧超压后将打开该侧的溢流阀将油液流至低压侧。
17、蓄能器一方面用于储存闭式液压回路所需的油液以及系统由于液压油外漏而需要补入的油,另一方面用于维持双向泵的吸油压力,向低压吸油侧进行补油。从充油口通过单向阀向系统冲油,蓄能器通过单向阀向双向泵的低压侧补油。
18、本方案中的泵阀一体装置通过集成化设计使得整体尺寸小,将双向泵和闭式液压系统的管道集成到一个阀块中,通过联轴器与电机相连接,电机也采用的是无框电机,采用单独设计的散热罩进行封装,使其体积尽可能小。区别于常规的液压系统中泵和电机基本上是单独的标准件,外形尺寸比较大的情况,本方案中的泵阀一体装置的结构形式新颖,紧凑,独特。
19、本实用新型的有益效果为:1、本方案通过集成设计,形成一个结构紧凑、体积更小的泵阀一体单元;较常规的液压系统,解决了体积外形过大,不便于负重和应用的问题;2、本方案中采用了基于对称执行单元的闭式液压系统,相比非对称液压缸,不需要由双液控单向阀及大蓄能器组成的补油回路,因此回路原理上大大的简化;有助于降低闭式液压系统的体积,以适用于液压驱动的各种小型化机器上;3、本方案在应用到四足机器人时,对四足机器人的髋关节俯仰、髋关节侧摆、膝关节旋转的液压原理进行了统一,同时考虑到了极端情况下有外力拉动膝关节以及所有关节双向负负载的情况,为后续零部件的通用和维护提供了方便;4、能够满足四足机器人关节液压系统不同的工况需求,系统组成简单,有助于减少系统所需的体积和重量,同时增强了系统的可靠性,还实现了停机状态下任意稳定姿态的站立。
- 还没有人留言评论。精彩留言会获得点赞!