一种用于架空线缆作业设备上下线的吊装装置的制作方法
[0001]
本发明涉及电力辅助设备技术领域,尤其涉及一种用于架空线缆作业设备上下线的吊装装置。
背景技术:
[0002]
随着电力行业机器人技术的发展,越来越多的机器人代替检修人员从事环境恶劣、工序复杂的工作,机器人在架空线缆方面的应用也越来越广泛。为了排除架空线缆的安全隐患,可以采用巡检机器人对架空线缆进行巡检,检修人员可以根据巡检机器人反馈的画面获知架空线缆的具体情况,以便及时制定、实施排除隐患的检修措施。为了清理架空线缆上的挂放物或清除架空线缆老化的外部涂层,可以采用清扫机器人对架空线缆进行清理,以便后续对架空线缆进行喷涂作业。为了提高架空线缆的传输安全性,可以在清扫完成后采用喷涂机器人对架空线缆进行绝缘涂料喷涂,使绝缘涂料在架空线缆的外部形成新的绝缘层。
[0003]
由于架空线缆本身具有一定的吊装承受力,通常会将架空线缆作业设备直接悬吊在相应的架空线缆上进行作业。为了将架空线缆作业设备悬吊在架空线缆上完成上线动作,或者,为了将架空线缆作业设备自架空线缆上取下完成下线动作,检修人员需要攀爬至高处先将吊轮安装在架空线缆上,然后通过卷扬机和吊绳将作业设备提升至架空线缆所处高度或将作业设备降放于地面上。架空线缆作业设备的现有上下线方式需要检修人员攀爬至高处并进行安装,不利于提高作业安全性和作业效率。
技术实现要素:
[0004]
为了解决上述现有技术中存在的缺点和不足,本发明提供了一种用于架空线缆作业设备上下线的吊装装置,有效提高架空线缆作业设备上下线时的作业安全性。
[0005]
为了实现上述技术目的,本发明提供的一种架空线缆作业设备上下线的吊装装置,包括吊筐及平台,平台设于吊筐上且用于放置架空线缆作业设备,所述吊装装置还包括立杆、卷扬机构、调整电机及控制机构,立杆的顶部设有挂钩,卷扬机构设于挂钩与吊筐之间且可驱动吊筐上升或下降,调整电机设于吊筐上且可驱动平台前后移动,控制机构设于吊筐上且用于控制卷扬机构和调整电机。
[0006]
优选的,所述卷扬机构包括卷扬轮、缠绕于卷扬轮上的牵引带及用于驱动卷扬轮的卷扬电机,牵引带的末端连接于挂钩。
[0007]
优选的,所述挂钩设有两个且分别位于吊筐的左右两侧,挂钩连接有沿前后方向布置的横杆,卷扬机构设有两个且分别与两个挂钩对应设置,每个卷扬机构均设有两个卷扬轮且两个卷扬轮分别位于对应立杆的前后两侧,两个卷扬轮上牵引带的末端分别连接于横杆的前后两端。
[0008]
优选的,所述卷扬机构还包括传动轴,传动轴可转动架设于吊筐上,两个卷扬轮分别套设于传动轴的两端,卷扬电机与传动轴之间设有传动结构,卷扬电机通过传动结构及
传动轴驱动卷扬轮转动。
[0009]
优选的,所述卷扬机构还包括设于吊筐上的安全开关及用于触发安全开关的压杆,吊筐上升至压杆与横杆抵触时压杆触发安全开关且使卷扬电机停止运行。
[0010]
优选的,所述吊筐上设有使牵引带受到限位的限位结构,限位结构包括限位座及一对限位轮,限位座设于吊筐上,限位轮可转动设于限位座上,牵引带穿经限位座且位于两个成对设置的限位轮之间。
[0011]
优选的,所述调整电机设有可前后移动的推杆,平台连接于推杆。
[0012]
优选的,所述吊筐上设有沿前后方向布置的支梁,平台的底部设有套设于支梁外部的滑座;和/或,所述平台上设有弹性垫。
[0013]
优选的,所述吊筐的底部设有电控箱,控制机构设于电控箱内,电控箱内还设有电池,控制机构包括控制板及无线信号收发器,无线信号收发器、卷扬机构及调整电机均信号连接于控制板。
[0014]
优选的,所述吊装装置还包括设于吊筐上的拍摄器,拍摄器信号连接于控制板。
[0015]
采用上述技术方案后,本发明具有如下优点:
[0016]
1、本发明提供的吊装装置,架空线缆作业设备上线时,通过立杆将挂钩先挂放于架空线缆上,然后通过卷扬机构带动吊筐及作业设备上升,吊筐上升至合适高度后,调整电机通过平台驱动作业设备前后移动使作业设备的行走机构能顺利挂放于架空线缆上,完成作业设备的上线动作。架空线缆作业设备下线时,先使作业设备的行走机构脱离架空线缆,然后通过卷扬机构带动吊筐及作业设备下降,最后通过立杆将挂钩自线缆上取离即可。本发明提供的吊装装置能很好的满足架空线缆作业设备上下线的工作要求,检修人员无需攀爬至高处后将吊装构件安装于架空线缆上,有利于提高架空线缆检修作业的安全性和效率。
[0017]
2、合理设置挂钩的数量及设置位置,合理设置卷扬机构的具体结构,每个卷扬机构的两个牵引带的末端分别连接于横杆的前后两端,吊筐的四个角部均通过牵引带连接于横杆,使吊筐在升降时能均匀受力,有利于提高吊筐带动作业设备升降时的稳定性。
[0018]
3、吊筐上升至压杆与横杆抵触时,吊筐上升到位,此时,压杆在横杆的抵触作用下触发安全开关,卷扬电机断电停止运行,吊筐不再上升,通过压杆与触发开关的配合有效控制卷扬机构驱动吊筐上升时的最大行程,有利于提高装置整体的作业安全性。
[0019]
4、牵引带穿经限位座且位于两个成对设置的限位轮之间,通过限位轮和限位座使牵引带受到限位,提高牵引带的收放稳定性,有利于提高吊装装置的升降稳定性。
[0020]
5、调整电机优选采用推杆电机,平台连接于调整电机的推杆,调整电机工作时,推杆带动平台前后移动,平台可以带动放置在其上的作业设备同步前后移动使作业设备靠近或远离架空线缆,以便作业设备的行走机构能顺利挂放或脱离架空线缆。
[0021]
6、平台底部的滑座套设于吊筐的支梁上,通过滑座与支梁的配合有利于提高平台前后移动时的稳定性。平台上设置弹性垫,通过弹性垫增大作业设备放置在平台上时的稳定性,避免作业设备在吊筐升降时相对于平台滑动的情况,有利于提高作业设备上线或下线时的稳定性。
[0022]
7、利用电池对卷扬电机、调整电机、安全开关等用电器件进行供电,解决吊装装置因接电问题导致使用范围受限的缺陷,也能避免接电电线缠绕于其他部件上导致装置不能
顺利运行的情况。地面检修人员可以通过遥控装置与控制机构进行无线信号交换,以便根据具体情况通过遥控装置向控制板发送操作指令,控制板接收到操作指令后可以命令相关构件执行指令,使吊装装置可以将作业设备顺利挂放至架空线缆上。
[0023]
8、拍摄器对作业设备的上线动作和下线动作进行拍摄,并可以将拍摄的画面通过控制机构反馈给地面检修人员使用的遥控装置,以便地面检修人员可以根据反馈的画面及时作出操作指令使作业设备能顺利挂放或脱离架空线缆。
附图说明
[0024]
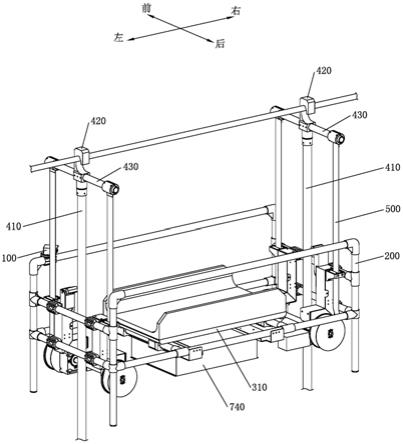
图1为本发明实施例一吊装装置的整体示意图;
[0025]
图2为本发明实施例一吊装装置的爆炸示意图;
[0026]
图3为本发明实施例一吊装装置的局部结构示意图;
[0027]
图4为本发明实施例一吊装装置中调整电机与平台的结构示意图;
[0028]
图5为本发明实施例一吊装装置的电控示意图。
[0029]
图中,100-拍摄器,200-吊筐,210-支梁,310-平台,320-推板,330-推片,340-滑座,341-上座体,342-下座体,350-弹性垫,410-立杆,420-挂钩,430-横杆,500-卷扬机构,510-卷扬轮,520-牵引带,530-卷扬电机,540-传动轴,550-压杆,560-安全开关,600-调整电机,610-推杆,710-支座,720-限位座,730-支架,740-电控箱,750-限位轮,810-控制板,820-无线信号收发器,830-遥控装置。
具体实施方式
[0030]
下面结合附图和具体实施例对本发明作进一步说明。需要理解的是,下述的“上”、“下”、“左”、“右”、“纵向”、“横向”、“内”、“外”、“竖直”、“水平”、“顶”、“底”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本发明和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0031]
实施例一
[0032]
如图1至图5所示,本发明实施例一提供的一种用于架空线缆作业设备上下线的吊装装置,包括吊筐200及平台310,平台310设于吊筐200上且用于放置架空线缆作业设备。吊装装置还包括立杆410、卷扬机构500、调整电机600及控制机构,立杆410的顶部设有挂钩420,卷扬机构500设于挂钩420与吊筐200之间且可驱动吊筐200上升或下降,调整电机600设于吊筐200上且可驱动平台310前后移动,控制机构设于吊筐200上且用于控制卷扬机构500和调整电机600。
[0033]
结合图3,本实施例中,立杆410设有两根且分别位于吊筐200的左右两侧,相应的,挂钩420也设有两个挂钩且分别位于吊筐200的左右两侧,每个挂钩420均连接有沿前后方向布置的横杆430。相应的,卷扬机构500也设有两个且分别位于吊筐200的左右两侧与两个挂钩420分别对应设置,卷扬机构500包括卷扬轮510、缠绕于卷扬轮510上的牵引带520及用于驱动卷扬轮510的卷扬电机530,每个卷扬机构500均设有两个卷扬轮510且两个卷扬轮510分别位于对应立杆410的前后两侧,两个卷扬轮510上牵引带520的末端分别连接于横杆430的前后两端。如此,吊筐200上共设置四个卷扬轮510,四个卷扬轮510分别位于吊筐200
的四个角部。本实施例中,挂钩420固定于立杆410的顶端,横杆430穿经挂钩420设置,挂钩420与横杆430之间通过螺钉进行固定。
[0034]
卷扬机构500还包括沿前后方向布置的传动轴540,传动轴540可转动架设于吊筐200上,两个卷扬轮510分别套设于传动轴540的两端,卷扬电机530与传动轴540之间设置传动结构,卷扬电机530通过传动机构及传动轴540驱动卷扬轮510转动。本实施例中,吊筐200上设有支座710,传动轴540通过轴承可转动穿设于支座710上,卷扬电机530的电机轴与传动轴540垂直布置,电机轴与传动轴540之间优选采用蜗轮蜗杆传动配合结构。
[0035]
为了提高牵引带520的收放稳定性,吊筐200上设有使牵引带520受到限位的限位结构,限位结构包括限位座720及一对限位轮750,限位座720设于吊筐200上,限位轮750可转动设于限位座720上,牵引带520穿经限位座720且位于两个成对设置的限位轮750之间。本实施例中,限位结构与牵引带520一一对应设置,限位座720固定于支座710的一侧,限位座720呈筐型结构,成对设置的两个限位轮750分别位于牵引带520的左右两侧。
[0036]
为了限制吊筐200上升时的最大行程,卷扬机构500还包括设于吊筐200上的安全开关560及用于触发安全开关560的压杆550,吊筐200上升至压杆550与横杆430抵触时压杆550触发安全开关560且使卷扬电机530停止运行。本实施例中,与每个卷扬机构500对应的其中一个支座710的侧部固定有支架730,安全开关560设于支架730内,压杆550的一端铰接于支架730的顶端,压杆550的底部与支架730的顶端之间设置弹簧。吊筐200上升到位时,压杆550与横杆430抵触,压杆550在横杆430的抵触作用下克服弹簧的弹力转动并触发安全开关560,卷扬电机530断电停止运行,吊筐200不再上升。压杆550脱离横杆430时,弹簧带动压杆550复位使压杆550松开安全开关560。
[0037]
结合图4,调整电机600优选采用推杆电机,调整电机600包括可前后移动的推杆610,平台310连接于推杆610。调整电机600工作时,推杆610带动平台310前后移动,平台310可以带动放置在其上的作业设备同步前后移动使作业设备靠近或远离架空线缆。本实施例中,调整电机600的后端铰接于吊筐200,平台310的底部固定有推板320,推板320的底部固定有u形的推片330,推杆610与推片330通过销轴连接在一起。
[0038]
为了提高平台310前后移动时的平稳性,吊筐200上设有沿前后方向布置的支梁210,平台310的底部设有滑座340,滑座340套设于吊筐200的支梁210上,通过滑座340与支梁210的配合提高平台310前后移动时的稳定性。本实施例中,滑座340包括上座体341和下座体342,上座体341和下座体342结合抱住支梁210并通过螺栓连接于平台310。
[0039]
为了提高作业设备放置在平台310上时的稳定性,平台310的顶面设有弹性垫350,通过弹性垫350增大作业设备放置在平台310上时的稳定性,避免作业设备在吊筐200升降时相对于平台310滑动的情况。本实施例中,弹性垫350优选采用弹性泡棉。
[0040]
吊筐200的底部设有电控箱740,控制机构设于电控箱740内,控制机构包括控制板810及无线信号收发器820,无线信号收发器820、卷扬机构500、调整电机600及安全开关560均信号连接于控制板810。
[0041]
为了便于检修人员获知作业设备是否上线成功或下线成功,吊装装置还包括设于吊筐200上的拍摄器100,拍摄器100信号连接于控制板810。本实施例的吊装装置还配备有遥控装置830,遥控装置830设有主控板及信号连接于主控板的无线信号收发器820及显示屏,遥控装置830与控制板810之间可以通过无线信号收发器830进行无线信号交换,以便检
修人员根据具体情况通过遥控装置向控制板810发送操作指令,控制板810接收到操作指令后可以命令相关构件执行指令,使吊装装置可以将作业设备顺利挂放至架空线缆上。拍摄器100可以对作业设备的上线动作和下线动作进行拍摄,并可以将拍摄的画面通过控制机构反馈给地面检修人员使用的遥控装置830,以便地面检修人员可以根据反馈的画面及时作出操作指令使作业设备能顺利挂放或脱离架空线缆。
[0042]
利用本实施例的吊装装置完成架空线缆作业设备的上线动作时,先将立杆410通过挂钩420挂放于架空线缆上,牵引带520自卷扬轮510上脱离,然后卷扬电机530驱动卷扬轮510转动使牵引带520缠绕于卷扬轮510上,牵引带520带动吊筐200及作业设备上升。吊筐200上升至合适高度后,卷扬电机530停止工作,然后通过调整电机600驱动平台310及放置于平台310上的作业设备前后移动使作业设备的行走机构能顺利挂放于架空线缆上,完成作业设备的上线动作。
[0043]
架空线缆作业设备下线时,卷扬机构500带动吊筐200先上升一段距离使作业设备的行走机构在竖向上脱离架空线缆,然后调整电机600驱动平台310移动使作业设备在前后方向上远离架空线缆,最后通过卷扬机构500带动吊筐200及作业设备下降,吊筐200下降至地面后,将立杆410自架空线缆上取离即可。
[0044]
可以理解的是,卷扬电机530的电机轴与传动轴540之间也可以采用其他传动配合结构,满足传动要求即可。
[0045]
可以理解的是,卷扬电机530的电机轴也可以与传动轴540平行布置。
[0046]
可以理解的是,弹性垫350也可以采用其他材质的弹性垫,满足防滑要求即可。
[0047]
可以理解的是,也可以在平台310的顶面设置防滑花纹等防滑结构来代替弹性垫350,此时,取消弹性垫350的设置。
[0048]
可以理解的是,也可以采用相互配合的导轨和导轨座来代替滑座340和支梁210,导轨座设于吊筐200上,导轨设于平台310的底部。
[0049]
可以理解的是,本实施例的吊装装置可以用于实现架空线缆巡检机器人、架空线缆清扫机器人、架空线缆喷涂机器人或其他架空线缆作业设备的上下线动作。
[0050]
实施例二
[0051]
本实施例中,挂钩420可拆卸设于立杆410的顶端。架空线缆作业设备上线前,通过立杆410将挂钩420挂放于架空线缆上后,将立杆410与挂钩420分离并将立杆取离吊装装置。架空线缆作业设备下线后,将立杆410的顶端与挂钩420连接,然后通过立杆410将挂钩420自架空线缆上取下即可。
[0052]
可以理解的是,挂钩420与立杆410之间可以采用螺纹配合、旋扣与旋合槽配合等合理的可拆卸连接结构实现可拆卸连接。
[0053]
除上述优选实施例外,本发明还有其他的实施方式,本领域技术人员可以根据本发明作出各种改变和变形,只要不脱离本发明的精神,均应属于本发明权利要求书中所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1