液压式极地船舶轴系回旋振动半主动控制装置
本发明专利属于船舶振动与噪声振动控制领域,具体涉及液压式船舶轴系回旋振动半主动控制装置。
背景技术:
极地船舶轴系是实现破冰船发动机与推进器(一般为螺旋桨)的能量传递、同时又将螺旋桨旋转产生的轴向推力通过轴系传给船体,推动船舶前进的系统,是破冰船动力系统中必不可少的重要部件。推进轴系由于主机不均匀传递力矩、安装上的不对中、材料的不均匀、加工的不精确以及自身质量的不平衡,将会导致破冰船轴系的回旋振动。另外,不均匀的流场会引起破冰船尾部的扰动,进而使船舶发生共振。严重的回旋振动将会使螺旋桨轴锥形大端处产生过大的弯曲应力,该应力又会因螺旋桨轴端螺帽松动、桨在锥部振跳而加剧。如果考虑到海水腐蚀作用而引起钢的弯曲疲劳极限急剧下降,则桨轴锥形大端将出现龟裂以致折损等重大疲劳破坏事故。近年来,许多国内外学者开展了轴系回旋振动控制方面的研究,总结而言一般有两条思路:一种是基于结构动力学原理在推进轴系结构设计中进行优化调整,主要是规避共振频率区间;一种是对推进轴系结构附加控制器进行控制,包括被动、半主动以及主动控制等手段,控制回旋振动响应幅值。在船舶推进轴系结构设计中,可采用以下措施:(1)改变螺旋桨的材料和叶片数;(2)改变轴系自身尺寸(直径、螺旋桨轴的悬臂长度等);(3)合理布置轴承位置: (4)提高艉部船体的刚度;(5)提高轴的加工质量和安装对中精度;(6)改进轴承设计,提高轴承润滑性能;(7)在船型设计中尽可能选择不会使伴流场产生急剧变化的船型等。但是这些改善工艺的方法带来的减振效果有限且随着工作时间的加长其减振效果会逐渐变差。被动控制方法主要指不通过外部动力供应的方式对轴系进行振动控制,如给系统加装橡胶
‑
硅油减震器。其优点在于无需额外的能源消耗,缺点是控制的精度与效率较差。主动式控制需要外部的能源供应,如通过压电作动杆、载荷传感器和辅助轴承将主动控制的作动力施加在靠近齿轮端的轴上。这种控制方式通过给系统施加外部作用力对轴系回旋振动控制,优点在于控制的精度效率高,缺点在于能耗高。半主动控制将被动式控制与主动式控制相结合,融合了被动式控制能耗低和主动式控制精度效率高的优点。液压传动技术是智能减振技术中的一种。液压传动装置具有防腐性好、结构紧凑、动态响应时间短、性能稳定,密封寿命长等优点。因此,针对舰船轴系传统减振技术的缺点,本发明引入液压传动技术实现极地船舶轴系回旋振动半主动控制智能减振的目的。
技术实现要素:
1、所要解决的技术问题:常规的改善工艺方法和被动减振方法带来的减振效果有限且随着工作时间的加长其减振效果会逐渐变差,缺乏对系统的调节控制能力,而主动式减振虽控制的精度与效率较高,但是其能耗大。
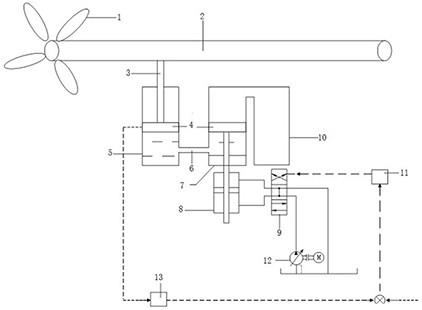
2、技术方案:为了解决以上问题,本发明提供了一种液压式极地船舶轴系回旋振动半主动控制装置,包括:补偿缸5、中间过渡缸7、气液蓄能器10、主动缸8、伺服阀9、变量泵12、位移传感器13、控制器11。所述补偿缸5共三个,相邻两补偿缸5之间呈120度并沿轴系2径向分布。位移传感器13置于补偿缸5的活塞4上并将测得的位移信号与给定的信号相比较得到偏差信号,将偏差信号输出至控制器11中,经由控制算法计算出相应的控制指令施加于伺服阀9。伺服阀9在变量泵12与控制指令的驱动下,控制着主动缸8上下油腔油液的运动,实现主动补偿。气液蓄能器10作为缓冲装置实现被动补偿。主动缸8、补偿缸5、气液蓄能器10通过中间过渡缸7结合成为半主动控制装置。发生回旋振动时,气液蓄能器10先补偿掉一部分振动能量并减小液压力的反作用力对船体的影响,然后位移传感器13检测到活塞4位置的变化,通过控制主动缸8给系统施加外部液压力,从而实现轴系的回旋振动半主动控制。所述的补偿缸5共三个,相邻两补偿缸5之间呈120度并沿轴系径向分布。所述的位移传感器13为磁致伸缩位移传感器。所述的气液蓄能器10为活塞式气液蓄能器10并与中间过渡缸7连接。所述的伺服阀9为喷嘴挡板式电液伺服阀。所述的主动缸8为双杆活塞缸。所述的补偿缸5和中间过渡缸7为单杆活塞缸,并且中间过渡缸7的杆与主动缸8的杆刚性连接,补偿缸5与中间过渡缸7通过液压管6连接。所述的控制器11采用s7
‑
300 plc控制器。其控制算法采用线性自抗扰(ladrc)控制算法。所述的液压式极地船舶轴系回旋振动半主动线性自抗扰控制算法为:其中表示对x的估计,x=[x
1 x
2 x3]
t
,x1=y,x3=f,y是活塞4的位移信号,是活塞4的速度信号,f是系统的总干扰,b0是系统特征参量的估计值,l=[β
1 β
2 β3]
t
为线性扩张状态观测器矩阵,u是线性自抗扰的总控制量,u0是线性误差反馈控制率。是线性扩张状态观测器。β
1 β
2 β
3 k
p k
d
为待调节参数。所述的线性扩张状态观测器矩阵l=[β
1 β
2 β3]
t
的参数具体取值为β1=3ω
o
,其中ω
o
为线性扩张状态观测器的带宽。所述的线性误差反馈控制率参数k
p
和k
d
的具体取值为k
d
=2ω
c
,其中ω
c
为控制器带宽。
[0016]
3、有益效果:本发明提供的液压式极地船舶轴系回旋振动半主动控制装置,系统工作螺旋桨1
转动时,导致传动轴系2上受到的振动,通过补偿缸杆3、补偿缸5、活塞4、液压管6、中间过渡缸 7等传递给气液蓄能器10,气液蓄能器10充当缓冲装置进行被动减振,先补偿掉一部分振动能量并减小液压力的反作用力对船体的影响。位移传感器13检测到活塞4位置的变化,通过控制主动缸8给系统施加外部液压力,从而实现轴系的回旋振动半主动控制。
附图说明
图1为液压式极地船舶轴系回旋振动半主动控制装置的控制原理图。图2为液压式极地船舶轴系回旋振动半主动控制装置的结构示意图。图3为液压式极地船舶轴系回旋振动半主动控制装置的补偿缸沿轴系的径向分布图。图4为液压式极地船舶轴系回旋振动半主动控制装置的主视图。
具体实施方式
参考图1
‑
4,液压式极地船舶轴系回旋振动半主动控制装置包括:补偿缸5、中间过渡缸7、气液蓄能器10、主动缸8、伺服阀9、变量泵12、位移传感器13、控制器11共三组,所述补偿缸5共三个,相邻两补偿缸5之间呈120度并沿轴系2径向分布,这样就能合成围绕轴系360
°
任意方向的控制力。位移传感器13置于补偿缸5的活塞4上并将测得的位移信号与给定的信号相比较得到偏差信号,将偏差信号输出至控制器11s7
‑
300 plc中,经由线性自抗扰控制算法(ladrc)计算出相应的控制指令施加于伺服阀9。伺服阀9在变量泵12与控制指令的驱动下,控制着主动缸8上下油腔油液的运动,实现主动补偿。气液蓄能器10作为缓冲装置实现被动补偿。主动缸8、补偿缸5、气液蓄能器10通过中间过渡缸7结合成为半主动控制装置。发生回旋振动时,气液蓄能器10先补偿掉一部分振动能量并减小液压力的反作用力对船体的影响,然后位移传感器13检测到活塞4位置的变化,通过控制主动缸8给系统施加外部液压力,从而实现轴系的回旋振动半主动控制。补偿缸5与轴承刚性连接,补偿缸5的补偿杆3伸出与轴系2接触,补偿缸5的进油/出油口通过液压管6与各自的外部半主动控制部分相连接。所述的外部半主动控制部分包括中间过渡缸7、气液蓄能器10、主动缸8、伺服阀9、变量泵12、位移传感器13、控制器11。气液蓄能器10为活塞式气液蓄能器并与中间过渡缸7连接,充当缓冲装置进行被动减振,先补偿掉一部分振动能量并减小液压力的反作用力对船体的影响。中间过渡缸7为单杆活塞缸,并且中间过渡缸7的杆与主动缸8的杆刚性连接,补偿缸5 与中间过渡缸7通过液压管6连接。液压式极地船舶轴系回旋振动半主动控制装置的主动控制部分包括:主动缸8、伺服阀9、变量泵12、位移传感器13、控制器11。位移传感器13安装在补偿缸5上,用于检测补偿缸 5的位移,其将测得的位移信号与给定的信号相比较得到偏差信号,将偏差信号输出至控制器11s7
‑
300 plc中,经由线性自抗扰控制算法(ladrc)计算出相应的控制指令施加于伺服阀9,伺服阀9在变量泵12与控制指令的驱动下,控制主动缸8给系统施加外部液压力,从而实现轴系的回旋振动主动控制。所述的位移传感器13为磁致伸缩位移传感器。所述的气液蓄能器10为活塞式气液蓄能器并与中间过渡缸7连接。
所述的伺服阀9为喷嘴挡板式电液伺服阀。所述的主动缸8为双杆活塞缸。所述的补偿缸5和中间过渡缸7为单杆活塞缸,并且中间过渡缸7的杆与主动缸8的杆刚性连接。所述的控制器11采用s7
‑
300 plc控制器。其控制算法采用线性自抗扰(ladrc)控制算法。所述的液压式极地船舶轴系回旋振动半主动线性自抗扰控制算法为:其中表示对x的估计,x=[x
1 x
2 x3]
t
,x1=y,x3=f,y是活塞4的位移信号,是活塞4的速度信号,f是系统的总干扰,b0是系统特征参量的估计值,l=[β
1 β
2 β3]
t
为线性扩张状态观测器矩阵,u是线性自抗扰的总控制量,u0是线性误差反馈控制率。是线性扩张状态观测器。β
1 β
2 β
3 k
p k
d
为待调节参数。所述的线性扩张状态观测器矩阵l=[β
1 β
2 β3]
t
的参数具体取值为β1=3ω
o
,其中ω
o
为线性扩张状态观测器的带宽。所述的线性误差反馈控制率参数k
p
和k
d
的具体取值为k
d
=2ω
c
,其中ω
c
为控制器带宽。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1