控制履带车辆转向的变速传动箱的制作方法
1.本实用新型涉及的是一种用于农业、林业、卫生等领域中履带式装载或牵引植保机械及其它农用设备的行走装置,特别是涉及一种电控履带车辆原地转向的变速传动箱。
背景技术:
2.履带车辆两条履带接地,行驶时接地面积大,接地比压小,履带车辆具有跨越障碍、壕沟,在软土、水田行走及在各种复杂工作面上行走等优点,因此被广泛应用。目前,履带车辆的转向机构是采用单侧履带动力切断或制动实现转向;履带车辆直行时,两侧离合器接合,转向制动器分离;转向时,转向一侧离合器切断动力,该侧转向制动器接合,使该侧履带制动停转,两侧履带一走一停,实现前进、后退或转向,其转向机构具有结构简单,操作方便。然而,履带车辆转向过程中只能通过一侧离合器接合制动该侧履带,而另一侧继续驱动履带实现转向。因其转向时为单边制动转向,造成转弯半径大、两条履带整体以一条履带的一端为旋转中心进行旋转,需要巨大的扭力,旋转时极容易壅土且对土壤剪切破坏严重,功率损耗大,且不能实现原地转向。为此,对上文所述现有履带车辆的转向机构作了改进,已由下述专利文献予以披露。
3.中国专利“一种行走转向装置”(授权公告号为cn 2630079y),该转向装置采用离合器轴左离合器齿轮和右离合器齿轮之间并联一套行星齿轮装置,通过左右离合器、行星齿轮装置和制动器的配合,改变左右二个动力输出轴的旋转方向和速度实现左、右履带正反转,控制履带车辆的前进、倒退、转向,且能实现原地转向。
4.但是,该专利所述转向装置采用行星齿轮装置,不仅其结构相对复杂,制造成本高,而且难以实现自动化控制。
5.除此之外,如中国专利“双差速器履带式联合收割机变速箱”(授权公告号为cn 103988639b),该变速箱采用差速器式转向机构、两个差速器行星变速机构、液压制动器等部件,不仅能完成履带车辆的前进、倒退、转向,且能实现原地转向。
6.但是,该变速箱采用左右两个差速器行星变速机构,该行星变速机构功率传送结构复杂,零部件多,体积大,重量重,制造成本高。[参阅
‑
专利权人
‑‑
江苏大学
‑‑
201410187318.5]
[0007]
除此之外,如中国专利“一种双流传动履带车辆电控静液转向系统”(授权公告号为cn108100034 b),该转向系统采用液压功率传递,其静液转向机构分别与排量调节及控制机构和转向功率后传动系统相连,排量调节及控制机构通过向静液转向机构发送信号控制转向功率后传动系统运动。能实现履带车辆的前进、倒退、转向、以及原地转向。
[0008]
但是,该转向系统采用液压功率传递,再经行星齿轮机构传递后完成前进、倒退、转向,其液压功率传递路线长,结构相对复杂,制造成本高。
[0009]
除此之外,如中国专利“一种用于驱动履带车辆转向的装置及方法”(授权公告号为cn 108100034b),该转向的装置包括:两个驱动电机、两个行星耦合装置和一个转向电机,通过两个行星耦合装置分别与履带车辆两侧的主动轮连接;采用双电机驱动形式,双电
机独立驱动,实现了履带车辆的前进、倒退、转向、以及原地转向。
[0010]
但是,该转向的装置采用两侧双电机独立驱动,再经行星齿轮机构传递后完成前进、倒退、转向,由于双电机分设两侧重量重,体积大,且行星齿轮机构的功率传送结构相对复杂,零部件多,制造成本高。
[0011]
除此之外,如中国专利申请“一种履带式差速正反转的动力耦合装置及变速箱”(申请公布号为cn 110370925 a),该动力耦合装置及变速箱采用发动机和调速电机组分别控制转速耦合装置中的行星齿轮机构中的行星架和太阳轮的转速,二者动力在转速耦合装置处进行转速耦合,再经行星齿轮机构传递后实现履带车辆的单边制动,完成前进、倒退、转向、自由半径转向以及原地转向。
[0012]
但是,该动力耦合装置及变速箱采用调速电机组分别控制转速耦合装置中的行星齿轮机构中的行星架和太阳轮,其功率传送的结构相对复杂,零部件多,制造成本高。
[0013]
除此之外,如中国专利:其名称为“一种履带拖拉机变速传动装备”,授权公告号为:cn110159722 b,该变速传动装备采用液压无级变速器的输出端直接控制蜗杆,进而改变蜗轮的速度,使履带车辆左右侧转速发生变化,完成前进、倒退、转向,通过行星齿轮传动机构驱动液压无级变速器,无级变速器的输入转速独立于变速器的转速,在变速器处于空挡时履带车辆可以原地转向。
[0014]
但是,该传动装备采用液压无级变速器、行星齿轮传动机构,其功率传送的结构相对复杂,零部件多,制造成本高。
[0015]
除此之外,如中国专利申请“一种履带车辆行星差速转向驱动桥”(申请公布号为: cn111022606a),该差速转向驱动桥包括壳体、转向输入轴和驱动输入轴、双联齿、锥齿轮、驱动轮和行星轮机构,能实现较小的转向半径,亦可360
°
原地转弯,可用于机械式多挡和液压式变速等履带车辆。
[0016]
但是,该专利所述转向装置采用行星齿轮机构,不仅其功率传送的结构相对复杂,制造成本高,而且难以实现自动化控制。
[0017]
除此之外,如中国专利申请:其名称为“一种具有差速转向的履带收割机”,申请公布号为: cn 111328488,该变速箱体内设有变速机构、转向机构、减速机构和比例换向,变速机构驱动转向机构,比例换向阀控制转向机构,转向机构通过减速机构输出实现联合收割机行走实现直行前进、后退、缓慢转向和原地转向;
[0018]
但是,该履带收割机的差速转向机构的两侧的驱动轮驱动力由比例换向阀控制,其比例换向阀的液压功率传递路线长,结构相对复杂,零部件多,制造成本高。
[0019]
上述现有技术所述的履带车辆的转向机构采用差速器转向机构、行星齿轮传动机构、液压转向机构、双电机驱动转向机构,其功率传递路线长,传递功率损耗大,零部件多,结构相对复杂,制造成本高。
[0020]
因此,有必要开发能消除以上弊端,其结构相对简单,功率传递路线短,传递功率损耗小的变速转向机构,实现原地转向时操作方便、灵活、可靠,便于自动化控制。
技术实现要素:
[0021]
针对以上现有技术存在的问题和不足,本实用新型的目的在于提供一种控制履带车辆转向的变速传动箱,该传动箱采用多个离合器,能够瞬时控制履带车辆直行(前进或者
后退)、直行时左转或右转、原地转向,操作方便、灵活、可靠,而且结构紧凑,还具有调速机构,能根据需要调节传动箱两根输出轴的转速和转向,实现履带车辆快速或慢速前进、后退或转向、原地转向,提高履带车辆工作效率。
[0022]
为达到上述目的,本实用新型采用下述技术方案:
[0023]
控制履带车辆转向的变速传动箱,该传动箱包括第五输出齿轮轴s5、第六输出齿轮轴s6、第七过渡齿轮轴s7、第五离合器c5、第六离合器c6、第五输出齿轮z5、第六输出齿轮z6、第七同步齿轮z7;第五输出齿轮z5、第六输出齿轮z6分别与第五输出齿轮轴s5、第六输出齿轮轴s6 在周向传力连接;第七过渡齿轮轴s7在周向上传力连接有第七同步齿轮z7,第七同步齿轮z7分别与第五输出齿轮z5、第六输出齿轮z6处于啮合状态,第五输出齿轮轴s5的另一端、第六输出齿轮轴s6的另一端分别与第五离合器c5主动件、第六离合器c6主动件在周向传力连接,第五输出齿轮轴s5或第六输出齿轮轴s6用于与动力装置的动力输出轴连接,上述传动箱还包括
[0024]
第八输出齿轮轴s8、第九输出齿轮轴s9、第七离合器c7、第八离合器c8、第八输出齿轮z8 、第九输出齿轮z9,上述第五离合器c5从动件、第六离合器c6从动件分别与第七离合器c7主动件、第八离合器c8主动件在周向传力连接,第七离合器c7主动件、第八离合器c8主动件分别与第八输出齿轮轴s8、第九输出齿轮轴s9的一端在周向传力连接,第八输出齿轮z8、第九输出齿轮z9分别与第七离合器c7从动件、第八离合器c8从动件在周向传力连接,第八输出齿轮z8与第九输出齿轮z9之间处于啮合状态,第八输出齿轮轴s8、第九输出齿轮轴s9的另一端分别与履带车辆左右驱动轮连接;
[0025]
当第五离合器c5、第六离合器c6均处于接合状态,第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆直行;
[0026]
当第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第六离合器c6处于断开状态时,实现履带车辆左转;
[0027]
当第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第五离合器c5处于断开状态时,实现履带车辆右转。
[0028]
作为对上述的控制履带车辆转向的变速传动箱的进一步改进,它还包括第三齿轮轴s3、第四齿轮轴s4、第三离合器c3、第四离合器c4、第三齿轮z3、第四齿轮z4;第三齿轮z3与第四齿轮z4处于啮合状态,第三齿轮z3、第四齿轮z4分别与第三齿轮轴s3、第四齿轮轴s4在周向传力连接,第三齿轮轴s3的另一端与第三离合器c3主动件在周向传力连接,第三离合器c3从动件与第五输出齿轮轴s5在周向传力连接,第四离合器c4从动件与第六输出齿轮轴s6在周向传力连接,第三齿轮轴s3或者第四齿轮轴s4用于与动力装置的动力输出轴连接;
[0029]
当第三离合器c3、第五离合器c5、第六离合器c6均处于接合状态,第四离合器c4、第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆前进;
[0030]
履带车辆前进过程中,当第三离合器c3、第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第四离合器c4、第六离合器c6处于断开状态时,实现履带车辆前进时左转;
[0031]
履带车辆前进过程中,当第三离合器c3、第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第四离合器c4、第五离合器c5处于断开状态时,实现履带车辆前进时
右转;
[0032]
当第四离合器c4、第五离合器c5、第六离合器c6均处于接合状态,第三离合器c3、第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆后退;
[0033]
履带车辆后退过程中,当第四离合器c4、第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第三离合器c3、第六离合器c6处于断开状态时,实现履带车辆后退时左转;
[0034]
履带车辆后退过程中,当第四离合器c4、第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第三离合器c3、第五离合器c5处于断开状态时,实现履带车辆后退时右转。
[0035]
作为对上述的控制履带车辆转向的变速传动箱的进一步改进,它还包括第一转速轴s1、第二转速轴s2、第一转速离合器c1、第二转速离合器c2、第一转速齿轮z1、第二转速齿轮z2;第一转速齿轮z1、第二转速齿轮z2分别与第一转速轴s1第二转速轴s2在周向传力连接,第一转速轴s1一端与第一转速离合器c1主动件在周向传力连接;第一转速离合器c1从动件与第三齿轮轴s3一端在周向传力连接;第一转速齿轮z1与第二转速齿轮z2处于啮合状态,第二转速轴s2一端与第二转速离合器c2主动件在周向传力连接,第二转速离合器c2从动件和第四离合器c4主动件均与第四齿轮轴s4在周向传力连接;第一转速轴s1或第二转速轴s2用于与动力装置的动力输出轴连接。
[0036]
作为对上述的控制履带车辆转向的变速传动箱的进一步改进,第一转速齿轮z1通过一齿轮传动机构与第二转速齿轮z2相啮合,经过该齿轮传动机构后,第一转速齿轮z1与第二转速齿轮 z2的转动方向相反,第一转速齿轮z1与第二转速齿轮z2的转速比大于1;
[0037]
当第一转速离合器c1、第三离合器c3、第五离合器c5、第六离合器c6均处于接合状态,第二转速离合器c2、第四离合器c4、第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆快速前进;
[0038]
履带车辆快速前进过程中,当第一转速离合器c1、第三离合器c3、第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第二转速离合器c2、第四离合器c4、第六离合器c6 处于断开状态时,实现履带车辆快速前进时左转;
[0039]
履带车辆快速前进过程中,当第一转速离合器c1、第三离合器c3、第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第二转速离合器c2、第四离合器c4、第五离合器c5处于断开状态时,实现履带车辆快速前进时右转;
[0040]
当第一转速离合器c1、第四离合器c4、第五离合器c5、第六离合器c6均处于接合状态,第二转速离合器c2、第三离合器c3、第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆快速后退;
[0041]
履带车辆快速后退过程中,当第一转速离合器c1、第四离合器c4、第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第二转速离合器c2、第三离合器c3、第六离合器c6 处于断开状态时,实现履带车辆快速后退时左转;
[0042]
履带车辆快速后退过程中,当第一转速离合器c1、第四离合器c4、第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第二转速离合器c2、第三离合器c3、第五离合器c5处于断开状态时,实现履带车辆快速后退时右转;
[0043]
当第二转速离合器c2、第三离合器c3、第五离合器c5、第六离合器c6均处于接合状
态,第一转速离合器c1、第四离合器c4、第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆慢速前进;
[0044]
履带车辆慢速前进过程中,当第二转速离合器c2、第三离合器c3、第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第一转速离合器c1、第四离合器c4、第六离合器c6处于断开状态时,实现履带车辆慢速前进时左转;
[0045]
履带车辆慢速前进过程中,当第二转速离合器c2、第三离合器c3、第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第一转速离合器c1、第四离合器c4、第五离合器c5处于断开状态时,实现履带车辆慢速前进时右转;
[0046]
当第二转速离合器c2、第四离合器c4、第五离合器c5、第六离合器c6均处于接合状态,第一转速离合器c1、第三离合器c3、第七离合器c7、第八离合器c8均处于断开状态时,实现履带车辆慢速后退;
[0047]
履带车辆慢速后退过程中,当第二转速离合器c2、第四离合器c4、第五离合器c5、第七离合器c7、第八离合器c8均处于接合状态,第一转速离合器c1、第三离合器c3、第六离合器c6处于断开状态时,实现履带车辆慢速后退时左转;
[0048]
履带车辆慢速后退过程中,当第二转速离合器c2、第四离合器c4、第六离合器c6、第七离合器c7、第八离合器c8均处于接合状态,第一转速离合器c1、第三离合器c3、第五离合器c5处于断开状态时,实现履带车辆慢速后退时右转。
[0049]
作为对上述的控制履带车辆转向的变速传动箱的进一步改进,所述的变速传动箱控制履带车辆快速向前行走时,
[0050]
第一转速离合器c1、第三离合器c3、第五离合器c5、第六离合器c6均处于接合状态,第二转速离合器c2、第四离合器c4、第七离合器c7、第八离合器c8均处于断开状态;
[0051]
该传动箱的第一转速轴s1正转经第一转速离合器c1将动力传送给第三齿轮轴s3,第三齿轮轴s3正转经第三离合器c3带动第五输出齿轮轴s5,第五输出齿轮轴s5带动第五输出齿轮z5正转,第五输出齿轮z5正转经第七同步齿轮z7带动第六输出齿轮z6正转,第六输出齿轮z6带动第六输出齿轮轴s6正转,第五输出齿轮轴s5、第六输出齿轮轴s6正转分别经处于接合状态的第五离合器c5、处于接合状态的第六离合器c6带动第七离合器c7主动件、第八离合器c8主动件,第七离合器c7主动件、第八离合器c8主动件分别带动第八输出齿轮轴s8、第九输出齿轮轴s9正转,第八输出齿轮轴s8、第九输出齿轮轴s9分别带动履带车辆的左、右驱动轮,驱动履带车辆快速向前行走。
[0052]
作为对上述的控制履带车辆转向的变速传动箱的进一步改进,所述的变速传动箱控制履带车辆快速向左原地转向时,第一转速离合器c1、第三离合器c3、第五离合器c5、第七离合器c7 、第八离合器c8均处于接合状态,第二转速离合器c2、第四离合器c4、第六离合器c6均处于断开状态;
[0053]
该传动箱的第一转速轴s1正转经第一转速离合器c1将动力传送给第三齿轮轴s3,第三齿轮轴s3经第三离合器c3带动第五输出齿轮轴s5,第五输出齿轮轴s5正转经处于接合状态的第五离合器c5带动第七离合器c7主动件,第七离合器c7主动件带动第八输出齿轮轴s8正转,同时因第七离合器c7处于接合状态,第七离合器c7主动件带动第七离合器c7从动件一起正转,与第七离合器c7从动件形成周向传力连接的第八输出齿轮z8正转,第八输出齿轮z8与第九输出齿轮z9啮合,由于第九输出齿轮z9与第八离合器c8从动件在周向传力连
接,而且第八离合器c8处于接合状态,所以第九输出齿轮z9反转经处于接合状态的第八离合器c8从动件、第八离合器c8主动件带动第九输出齿轮轴s9反转,上述第八输出齿轮轴s8正转和第九输出齿轮轴s9反转分别同步带动履带车辆左、右两个驱动轮,右驱动轮正转,左驱动轮反转,实现履带车辆快速向左原地转向。
[0054]
作为对上述的控制履带车辆转向的变速传动箱的进一步改进,各离合器均为电磁离合器。电磁离合器方便自动化控制,以控制器通过有线或无线方式控制各电磁离合器的动作(接合或断开)属于现有技术,不再说明。
[0055]
本实用新型传动箱相较于现有的履带车辆转向机构具有功率传递路线短,功率传递损耗小,零部件少,结构相对简单,制造成本低优点。
[0056]
第八输出齿轮轴s8、第九输出齿轮轴s9的分别与履带车辆的左、右驱动轮的输入轴连接,实现履带车辆调速前进、后退、左转向或右转向、原地转向,操作方便、灵活、可靠;该传动箱可采用远距离无线遥控或卫星定位,实现自动控制。
[0057]
当履带车辆初始状态静止,转向操作时能够实现原地转向;当履带车辆初始状态前进,转向操作时能够实现前进时转向;当履带车辆初始状态后退,转向操作时能够实现后退时转向。
[0058]
本实用新型实现履带车辆前进或后退时转向或者原地转向时不是以二条履带中的一条上的驱动轮中心点为旋转中心进行旋转,而是以履带车辆的两条平行履带的两个驱动轮中心点为旋转中心进行旋转,因此,转向时两条平行履带接地点不易壅土、对土壤剪切力减少,功率损耗大幅下降。
附图说明
[0059]
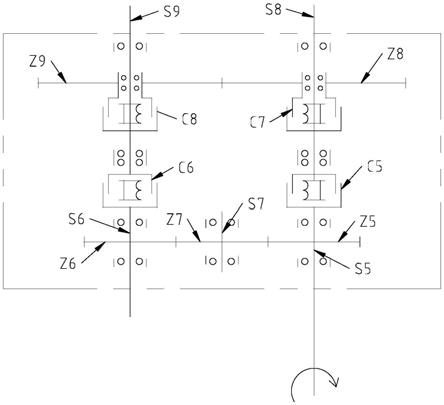
图1是实施例1的控制履带车辆转向的变速传动箱的结构示意图。
[0060]
图2是实施例2的控制履带车辆转向的变速传动箱的结构示意图。
[0061]
图3是实施例3的结构示意图(快速前进时)。
[0062]
图4是实施例3的结构示意图(快速后退时)。
[0063]
图5是实施例3的结构示意图(快速前进时左转或者原地左转)。
[0064]
图6是实施例3的结构示意图(快速前进时右转或者原地右转)。
[0065]
图7是实施例3的结构示意图(快速后退时左转或者原地左转)。
[0066]
图8是实施例3的结构示意图(快速后退时右转或者原地右转)。
[0067]
图9是实施例3的结构示意图(慢速前进时)。
[0068]
图10是实施例3的结构示意图(慢速后退时)。
[0069]
图11是实施例3的结构示意图(慢速前进时左转或者原地左转)。
[0070]
图12是实施例3的结构示意图(慢速前进时右转或者原地右转)。
[0071]
图13是实施例3的结构示意图(慢速后退时左转或者原地左转)。
[0072]
图14是实施例3的结构示意图(慢速后退时右转或者原地右转)。
具体实施方式
[0073]
以下结合说明书附图和具体实施例对本实用新型作进一步详细说明。
[0074]
实施例1:
[0075]
参见图1所示的控制履带车辆转向的变速传动箱,包括第五输出齿轮轴s5、第六输出齿轮轴s6、第七过渡齿轮轴s7、第五电磁离合器c5、第六电磁离合器c6、第五输出齿轮z5、第六输出齿轮z6、第七同步齿轮z7、第八输出齿轮轴s8、第九输出齿轮轴s9、第七电磁离合器 c7、第八电磁离合器c8、第八输出齿轮z8、第九输出齿轮z9。
[0076]
第五输出齿轮z5、第六输出齿轮z6分别与第五输出齿轮轴s5、第六输出齿轮轴s6在周向传力连接(如采用花键连接);第七过渡齿轮轴s7在周向上传力连接有第七同步齿轮z7,第七同步齿轮z7分别与第五输出齿轮z5、第六输出齿轮z6处于啮合状态,第五输出齿轮轴s5 的另一端、第六输出齿轮轴s6的另一端分别与第五电磁离合器c5主动件、第六电磁离合器c6 主动件在周向传力连接。
[0077]
第五电磁离合器c5从动件、第六电磁离合器c6从动件分别与第七电磁离合器c7主动件、第八电磁离合器c8主动件在周向传力连接,第七电磁离合器c7主动件、第八电磁离合器c8主动件分别与第八输出齿轮轴s8、第九输出齿轮轴s9的一端在周向传力连接,第八输出齿轮z8、第九输出齿轮z9分别与第七电磁离合器c7从动件、第八电磁离合器c8从动件在周向传力连接,第八输出齿轮z8与第九输出齿轮z9之间处于啮合状态,第八输出齿轮轴s8、第九输出齿轮轴s9的另一端分别与履带车辆左右驱动轮连接。
[0078]
第五输出齿轮轴s5或者第六输出齿轮轴s6作为动力输入轴均可以,现以第五输出齿轮轴s5 作为动力输入轴与动力装置的动力输出轴相连为例进行说明。
[0079]
当第五电磁离合器c5、第六电磁离合器c6均处于接合状态,第七电磁离合器c7、第八电磁离合器c8均处于断开状态时,实现履带车辆直行;此时,其右驱动轮的动力传递路线为:动力输出轴(正转)、第五输出齿轮轴s5(正转)、第五电磁离合器c5、第七电磁离合器c7主动件、第八输出齿轮轴s8、右驱动轮(正转);左驱动轮的动力传递路线为:动力输出轴(正转) 、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8主动件、第九输出齿轮轴s9、左驱动轮(正转)。因左右驱动轮同时正转,电控履带车辆直行。
[0080]
履带车辆直行过程中,当第五电磁离合器c5、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第六电磁离合器c6处于断开状态时,实现履带车辆直行时左转;当然,履带车辆初始状态静止,当第五电磁离合器c5、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第六电磁离合器c6处于断开状态时,实现履带车辆原地左转。此时,其右驱动轮的动力传递路线为:动力输出轴(正转)、第五输出齿轮轴s5(正转)、第五电磁离合器c5、第七电磁离合器c7主动件、第八输出齿轮轴s8、右驱动轮(正转);左驱动轮的动力传递路线为:动力输出轴(正转)、第五输出齿轮轴s5(正转)、第五电磁离合器c5、第七电磁离合器c7(正转) 、第八输出齿轮z8(正转)、第九输出齿轮z9(反转)、第八电磁离合器c8(反转)、第九输出齿轮轴s9、左驱动轮(反转)。因右驱动轮正转、左驱动轮反转,电控履带车辆实现直行时左转或者原地左转。是直行时左转还是原地左转,与履带车辆在转向前的状态有关,转向前静止,转向时就是原地转向,转向前直行,转向时就是直行过程中转向。
[0081]
履带车辆直行过程中,当第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第五电磁离合器c5处于断开状态时,实现履带车辆直行时右转。当然,履带车辆初始状态静止,第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第五电磁离合器c5处于断开状态时,实现履带车辆原地右转。此时,其左驱动轮
的动力传递路线为:动力输出轴(正转)、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮轴s9(正转)、左驱动轮;右驱动轮的动力传递路线为:动力输出轴(正转)、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8(正转)、第九输出齿轮z9(正转)、第八输出齿轮z8(反转)、第七电磁离合器 c7(反转)、第八输出齿轮轴s8、右驱动轮(反转)。因右驱动轮反转、左驱动轮正转,电控履带车辆实现直行时右转或者原地右转。是直行时右转还是原地右转,与履带车辆在转向前的状态有关,转向前静止,转向时就是原地转向,转向前直行,转向时就是直行过程中转向。
[0082]
本传动箱采用四个电磁离合器的接合或分离,将由一个固定不变旋转方向的动力输出轴经电磁离合器转换成左右两个相同转向或相反转向的第八输出齿轮轴s8和第九输出齿轮轴s9驱动履带车辆的左、右驱动轮,实现履带车辆调速直行、直行时转向、原地转向,操作方便、灵活、可靠;该传动箱可采用远距离无线遥控或卫星定位,实现自动控制。该变速传动箱具有功率传递路线短,功率传递损耗小,零部件少,结构相对简单,制造成本低优点。
[0083]
本实用新型实现履带车辆直行时转向或原地转向时不是以二条履带中的一条上的驱动轮中心点为旋转中心进行旋转,而是以履带车辆的两条平行履带的两个驱动轮之间的中心点为旋转中心进行旋转,因此,转向时两条平行履带接地点不易壅土、对土壤剪切力减少,功率损耗大幅下降。
[0084]
实施例2:
[0085]
参见图2所示的控制履带车辆转向的变速传动箱,相对于实施例1,本实施例2是在实施例 1的基础上增加了第三齿轮轴s3、第四齿轮轴s4、第三电磁离合器c3、第四电磁离合器c4、第三齿轮z3、第四齿轮z4。
[0086]
与实施例1相同的内容不再说明,下面重点说明与实施例1不同的内容。
[0087]
本实施例2中,第三齿轮z3与第四齿轮z4处于啮合状态,第三齿轮z3、第四齿轮z4分别与第三齿轮轴s3、第四齿轮轴s4在周向传力连接(如采用花键连接),第三齿轮轴s3的另一端与第三电磁离合器c3主动件在周向传力连接,第三电磁离合器c3从动件与第五输出齿轮轴 s5在周向传力连接,第四电磁离合器c4从动件与第六输出齿轮轴s6在周向传力连接。
[0088]
本实施例2中,第三齿轮轴s3或者第四齿轮轴s4作为动力输入轴(实施例1中,第五输出齿轮轴s5或者第六输出齿轮轴s6作为动力输入轴)。现以第三齿轮轴s3作为动力输入轴与动力装置的动力输出轴相连为例进行说明。
[0089]
当第三电磁离合器c3、第五电磁离合器c5、第六电磁离合器c6均处于接合状态,第四电磁离合器c4、第七电磁离合器c7、第八电磁离合器c8均处于断开状态时,实现履带车辆前进;此时,其右驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三电磁离合器c3( 正转)、第五输出齿轮轴s5(正转)、第五电磁离合器c5、第七电磁离合器c7主动件、第八输出齿轮轴s8、右驱动轮(正转);左驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三电磁离合器c3(正转)、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8主动件、第九输出齿轮轴s9、左驱动轮(正转)。因左右驱动轮同时正转,电控履带车辆前进。
[0090]
履带车辆前进过程中,当第三电磁离合器c3、第五电磁离合器c5、第七电磁离合器
c7、第八电磁离合器c8均处于接合状态,第四电磁离合器c4、第六电磁离合器c6处于断开状态时,实现履带车辆前进时左转;当然,履带车辆初始状态静止,当第三电磁离合器c3、第五电磁离合器c5、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第四电磁离合器c4、第六电磁离合器c6处于断开状态时,实现履带车辆原地左转。此时,其右驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三电磁离合器c3(正转)、第五输出齿轮轴s5(正转 )、第五电磁离合器c5、第七电磁离合器c7主动件、第八输出齿轮轴s8、右驱动轮(正转);左驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三电磁离合器c3(正转 )、第五输出齿轮轴s5(正转)、第五电磁离合器c5、第七电磁离合器c7(正转)、第八输出齿轮z8(正转)、第九输出齿轮z9(反转)、第八电磁离合器c8(反转)、第九输出齿轮轴s9、左驱动轮(反转)。因右驱动轮正转、左驱动轮反转,电控履带车辆实现前进时左转或者原地左转。是前进时左转还是原地左转,与履带车辆在转向前的状态有关,左转向前静止,左转向时就是原地左转,左转向前前进,左转向时就是前进过程中左转。
[0091]
履带车辆前进过程中,当第三电磁离合器c3、第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第四电磁离合器c4、第五电磁离合器c5处于断开状态时,实现履带车辆前进时右转。当然,履带车辆初始状态静止,当第三电磁离合器c3、第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第四电磁离合器c4、第五电磁离合器c5处于断开状态时,实现履带车辆原地右转。此时,其左驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三电磁离合器c3(正转)、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮轴s9(正转)、左驱动轮;右驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三电磁离合器c3(正转)、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8(正转)、第九输出齿轮z9(正转)、第八输出齿轮z8(反转)、第七电磁离合器c7 (反转)、第八输出齿轮轴s8、右驱动轮(反转)。因右驱动轮反转、左驱动轮正转,电控履带车辆实现前进时右转或者原地右转。是前进时右转还是原地右转,与履带车辆在转向前的状态有关,右转向前静止,右转向时就是原地右转,右转向前前进,右转向时就是前进过程中右转。
[0092]
当第四电磁离合器c4、第五电磁离合器c5、第六电磁离合器c6均处于接合状态,第三电磁离合器c3、第七电磁离合器c7、第八电磁离合器c8均处于断开状态时,实现履带车辆后退;此时,其右驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转) 、第六输出齿轮z6、第七同步齿轮z7(正转)、第五输出齿轮z5(反转)、第五输出齿轮轴 s5(反转)、第五电磁离合器c5、第七电磁离合器c7主动件、第八输出齿轮轴s8、右驱动轮( 反转);左驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转 )、第六电磁离合器c6、第八电磁离合器c8主动件、第九输出齿轮轴s9、左驱动轮(反转)。因左右驱动轮同时反转,电控履带车辆后退。
[0093]
履带车辆后退过程中,当第四电磁离合器c4、第五电磁离合器c5、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第三电磁离合器c3、第六电磁离合器c6处于断开状态时,实现履带车辆后退时左转;当然,履带车辆初始状态静止,实现履带车辆原地左转。此
时,右驱动轮的动力传递路线为:第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转)、第六输出齿轮z6、第七同步齿轮 z7(正转)、第五输出齿轮z5(反转)、第五输出齿轮轴s5(反转)、第五电磁离合器c5、第七电磁离合器c7主动件、第八输出齿轮轴s8、右驱动轮(反转);左驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4 、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转)、第六输出齿轮z6、第七同步齿轮z7(正转)、第五输出齿轮z5(反转)、第五输出齿轮轴s5(反转)、第五电磁离合器c5 、第七电磁离合器c7、第八输出齿轮z8(反转)、第九输出齿轮z9(正转)、第八电磁离合器 c8(正转)、第九输出齿轮轴s9、左驱动轮(正转)。因右驱动轮反转、左驱动轮正转,电控履带车辆实现后退时左转或者原地左转。是后退时左转还是原地左转,与履带车辆在转向前的状态有关,左转向前静止,左转向时就是原地左转,左转向前后退,左转向时就是后退过程中左转。
[0094]
履带车辆后退过程中,当第四电磁离合器c4、第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8均处于接合状态,第三电磁离合器c3、第五电磁离合器c5处于断开状态时,实现履带车辆后退时右转。当然,履带车辆初始状态静止,实现履带车辆原地右转。此时,其左驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三齿轮z3、第四齿轮z4 (反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮轴s9(反转)、左驱动轮(反转);右驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮z9(反转)、第八输出齿轮z8(正转)、第七电磁离合器c7(正转)、第八输出齿轮轴s8、右驱动轮(正转)。因右驱动轮正转、左驱动轮反转,电控履带车辆实现后退时右转或者原地右转。是后退时右转还是原地右转,与履带车辆在转向前的状态有关,右转向前静止,右转向时就是原地右转,右转向前后退,右转向时就是后退过程中右转。
[0095]
如果第四齿轮轴s4作为动力输入轴与动力装置的动力输出轴相连,其与以第三齿轮轴s3作为动力输入轴时的主要的不同在于:履带车辆直行的方向相反。也就是说,如果第三齿轮轴s3 作为动力输入轴时履带车辆是前进,则第四齿轮轴s4作为动力输入轴时履带车辆是后退;如果第三齿轮轴s3作为动力输入轴时履带车辆是后退,则第四齿轮轴s4作为动力输入轴时履带车辆是前进。其它过程类似,不再一一说明。
[0096]
本实施例2在实施例1的基础上实现了电控履带车辆的前进和后退,可以在前进时转向、后退时转向、原地转向,控制更加方便灵活。
[0097]
以控制器通过有线或无线方式控制各电磁离合器的动作(接合或断开)属于现有技术,不再说明,这样即可实现履带车辆的电控。
[0098]
实施例3:
[0099]
参见图3
‑
14所示的控制履带车辆转向的变速传动箱,相对于实施例2,本实施例3是在实施例2的基础上增加了第一转速轴s1、第二转速轴s2、第一转速电磁离合器c1、第二转速电磁离合器c2、第一转速齿轮z1、第二转速齿轮z2、两个外齿轮z10、z11构成的齿轮传动机构。
[0100]
与实施例2相同的内容不再说明,下面重点说明与实施例2不同的内容。
[0101]
本实施例3中,第一转速齿轮z1、第二转速齿轮z2分别与第一转速轴s1第二转速轴s2在周向传力连接(如花键连接),第一转速轴s1一端与第一转速电磁离合器c1主动件在周向传力连接;第一转速离合器c1从动件与第三齿轮轴s3一端在周向传力连接;第一转速齿轮z1与第二转速齿轮z2通过齿轮传动机构相啮合(第一转速齿轮z1、外齿轮z10、外齿轮z11、第二转速齿轮 z2依次啮合),第一转速齿轮z1与第二转速齿轮z2的转速比为2。第二转速轴s2一端与第二转速电磁离合器c2主动件在周向传力连接,第二转速电磁离合器c2从动件和第四电磁离合器c4主动件均与第四齿轮轴s4在周向传力连接;第一转速轴s1或者第二转速轴s2用于与动力装置的动力输出轴连接。
[0102]
将本实施例3的控制履带车辆转向的变速传动箱装在履带车辆上,履带车辆的动力装置的输出轴与传动箱1的第一转速轴s1连接,动力装置为内燃机,履带车辆起动时,该传动箱的第一转速轴s1正转带动第一转速齿轮z1正转,第一转速齿轮z1带动第二转速齿轮z2反转,根据第一转速电磁离合器c1、第二转速电磁离合器c2、第三电磁离合器c3、第四电磁离合器 c4、第五电磁离合器c5、第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8处于分离或接合状态,实现对履带车辆慢速或快速前进、慢速或快速前进中转向、慢速或快速后退、慢速或快速后退中转向、慢速或快速原地左转、慢速或快速原地右转,其具体如下:
[0103]
(1).当该传动箱中的第一转速电磁离合器c1处于断开状态,第二转速电磁离合器c2处于接合状态,则能够控制履带车辆快速前进、后退、原地左转向、原地右转向,其具体过程如下:
[0104]
(1
‑
1).如果采用本实施例3的一种电控履带车辆原地转向的变速传动箱控制履带车辆快速向前行走时,参见图3,
[0105]
则第一转速电磁离合器c1、第三电磁离合器c3、第五电磁离合器c5、第六电磁离合器 c6均处于接合状态,第二转速电磁离合器c2、第四电磁离合器c4、第七电磁离合器c7、第八电磁离合器c8均处于断开状态;
[0106]
该传动箱的第一转速轴s1正转经第一转速电磁离合器c1将动力传送给第三齿轮轴s3,第三齿轮轴s3正转经第三电磁离合器c3带动第五输出齿轮轴s5,第五输出齿轮轴s5带动第五输出齿轮z5正转,与此同时,第五输出齿轮z5正转经第七同步齿轮z7带第六输出齿轮z6正转,第六输出齿轮z6带动第六输出齿轮轴s6正转,第五输出齿轮轴s5、第六输出齿轮轴s6正转分别经处于接合状态的第五电磁离合器c5、处于接合状态的第六电磁离合器c6带动第七电磁离合器c7主动件、第八电磁离合器c8主动件,由于第七电磁离合器c7、第八电磁离合器c8处于断开状态,第七电磁离合器c7主动件、第八电磁离合器c8主动件分别带动第八输出齿轮轴s8、第九输出齿轮轴s9正转,第八输出齿轮轴s8、第九输出齿轮轴s9分别带动履带车辆的左驱动轮l、右驱动轮r,左、右驱动轮驱动履带车辆快速向前行走(前进);
[0107]
(1
‑
2).如果采用本实施例3的控制履带车辆转向的变速传动箱控制履带车辆快速向后行走时,参见图4,则第一转速电磁离合器c1、第四电磁离合器c4、第五电磁离合器c5、第六电磁离合器c6均处于接合状态,第二转速电磁离合器c2、第三电磁离合器c3、第七电磁离合器c7、第八电磁离合器c8均处于断开状态,
[0108]
该传动箱的第一转速轴s1正转经第一转速电磁离合器c1将动力传送给第三齿轮轴s3,第三齿轮轴s3正转,第三齿轮z3与第四齿轮z4啮合,并带动第四齿轮z4,第四齿轮z4
反转带动第四齿轮轴s4反转,第四齿轮轴s4反转经第四电磁离合器c4带动第六输出齿轮轴s6,第六输出齿轮轴s6带动第六输出齿轮z6反转,第六输出齿轮z6反转经第七同步齿轮z7传送给第五输出齿轮z5反转,第五输出齿轮z5带动第五输出齿轮轴s5反转,与此同时,第五输出齿轮轴s5、第六输出齿轮轴s6反转分别经处于接合状态的第五电磁离合器c5、处于接合状态的第六电磁离合器c6带动第七电磁离合器c7主动件、第八电磁离合器c8主动件,由于第七电磁离合器c7、第八电磁离合器c8处于断开状态,第七电磁离合器c7主动件、第八电磁离合器c8 主动件分别带动第八输出齿轮轴s8、第九输出齿轮轴s9反转,第八输出齿轮轴s8、第九输出齿轮轴s9分别带动左驱动轮l、右驱动轮r,驱动履带车辆快速向后行走(后退);
[0109]
(1
‑
3).如果采用本实用新型的控制履带车辆转向的变速传动箱控制履带车辆在向前行走中快速向左转向时或者控制履带车辆在静止时快速向左原地转向时,参见图5,则第一转速电磁离合器c1、第三电磁离合器c3、第五电磁离合器c5、第七电磁离合器c7、第八电磁离合器c8 均处于接合状态,第二转速电磁离合器c2、第四电磁离合器c4、第六电磁离合器c6均处于断开状态。
[0110]
该传动箱的第一转速轴s1正转经第一转速电磁离合器c1将动力传送给第三齿轮轴s3,第三齿轮轴s3经第三电磁离合器c3带动第五输出齿轮轴s5,由于第六电磁离合器c6处于断开状态,第五输出齿轮轴s5正转经处于接合状态的第五电磁离合器c5主动件、第五电磁离合器 c5从动件带动第七电磁离合器c7主动件,第七电磁离合器c7主动件带动第八输出齿轮轴s8 正转,因第七电磁离合器c7处于接合状态,第七电磁离合器c7主动件带动第七电磁离合器c7 从动件一起转动,固定在第七电磁离合器c7从动件上的第八输出齿轮z8正转,第八输出齿轮 z8与第九输出齿轮z9啮合,并带动第九输出齿轮z9反转,由于第九输出齿轮z9固定在第八电磁离合器c8从动件上,而且第八电磁离合器c8处于接合状态,所以第九输出齿轮z9反转经第八电磁离合器c8从动件、第八电磁离合器c8主动件带动第九输出齿轮轴s9反转,上述第八输出齿轮轴s8正转和第九输出齿轮轴s9反转分别同步带动履带车辆右驱动轮、左驱动轮,右驱动轮正转,左驱动轮反转,则实现履带车辆快速向左转向,如图5所示。是快速前进时左转还是快速原地左转,与履带车辆在转向前的状态有关,左转向前静止,左转向时就是快速原地左转,左转向前快速前进,左转向时就是快速前进过程中左转。
[0111]
(1
‑
4).如果采用本实用新型的控制履带车辆转向的变速传动箱控制履带车辆在向前行走中快速向右转向时或者控制履带车辆在静止时快速向右原地转向时,参见图6,则第一转速电磁离合器c1、第三电磁离合器c3、第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8 均处于接合状态,第二转速电磁离合器c2、第四电磁离合器c4、第五电磁离合器c5均处于断开状态。
[0112]
该传动箱的第一转速轴s1正转,传动箱的第一转速轴s1正转经第一转速电磁离合器c1将动力传送给第三齿轮轴s3,动力经第三齿轮轴s3(正转)、第三电磁离合器c3(正转)、第五输出齿轮轴s5(正转)、第七同步齿轮z7(反转)、第六输出齿轮z6(正转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮轴s9(正转)传递给左驱动轮,左驱动轮正转;与此同时,第八电磁离合器c8处于接合状态,第八电磁离合器c8主动件带动第八电磁离合器c8从动件一起转动,固定在第八电磁离合器c8从动件上的第九输出齿轮z9正转,第九输出齿
轮z9与第八输出齿轮z8啮合,并带动第八输出齿轮z8反转,第八输出齿轮z8经处于接合状态的第七电磁离合器c7从动件、第七电磁离合器c7主动件带动第八输出齿轮轴s8反转,上述第八输出齿轮轴s8反转和第九输出齿轮轴s9正转分别同步传送给履带,履带车辆左驱动轮、右驱动轮,左驱动轮正转,右驱动轮反转,实现履带车辆向右转转向,如图6所示。是快速前进时右转还是快速原地右转,与履带车辆在转向前的状态有关,右转向前静止,右转向时就是快速原地右转,右转向前快速前进,右转向时就是快速前进过程中右转。
[0113]
(1
‑
5).如果采用本实用新型的控制履带车辆转向的变速传动箱控制履带车辆在向后行走中快速向左转向时或者控制履带车辆在静止时快速向左原地转向时,参见图7,则第一转速电磁离合器c1、第四电磁离合器c4、第五电磁离合器c5、第七电磁离合器c7、第八电磁离合器c8 均处于接合状态,第二转速电磁离合器c2、第三电磁离合器c3、第六电磁离合器c6均处于断开状态。
[0114]
右驱动轮的动力传递路线为:动力输出轴(正转)、第一转速轴s1、第一转速电磁离合器 c1、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器c4 (反转)、第六输出齿轮轴s6(反转)、第六输出齿轮z6、第七同步齿轮z7(正转)、第五输出齿轮z5(反转)、第五输出齿轮轴s5(反转)、第五电磁离合器c5、第七电磁离合器 c7主动件、第八输出齿轮轴s8、右驱动轮(反转);左驱动轮的动力传递路线为:动力输出轴 (正转)、第一转速轴s1、第一转速电磁离合器c1、第三齿轮轴s3、第三齿轮z3、第四齿轮 z4(反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转)、第六输出齿轮z6、第七同步齿轮z7(正转)、第五输出齿轮z5(反转)、第五输出齿轮轴 s5(反转)、第五电磁离合器c5、第七电磁离合器c7、第八输出齿轮z8(反转)、第九输出齿轮z9(正转)、第八电磁离合器c8(正转)、第九输出齿轮轴s9、左驱动轮(正转)。因右驱动轮反转、左驱动轮正转,电控履带车辆实现后退时原地左转,如图7所示。是快速后退时左转还是快速原地左转,与履带车辆在转向前的状态有关,左转向前静止,左转向时就是快速原地左转,左转向前快速后退,左转向时就是快速后退过程中左转。
[0115]
(1
‑
6).如果采用本实用新型的控制履带车辆转向的变速传动箱控制履带车辆在向后行走中快速向右转向时或者控制履带车辆在静止时快速向右原地转向时,参见图8,则第一转速电磁离合器c1、第四电磁离合器c4、第六电磁离合器c6、第七电磁离合器c7、第八电磁离合器c8 均处于接合状态,第二转速电磁离合器c2、第三电磁离合器c3、第五电磁离合器c5均处于断开状态。
[0116]
其左驱动轮的动力传递路线为:动力输出轴(正转)、第一转速轴s1、第一转速电磁离合器c1、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器 c4(反转)、第六输出齿轮轴s6(反转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮轴s9(反转)、左驱动轮(反转);右驱动轮的动力传递路线为:动力输出轴(正转)、第三齿轮轴s3、第三齿轮z3、第四齿轮z4(反转)、第四齿轮轴s4、第四电磁离合器c4(反转)、第六输出齿轮轴s6(反转)、第六电磁离合器c6、第八电磁离合器c8、第九输出齿轮 z9(反转)、第八输出齿轮z8(正转)、第七电磁离合器c7(正转)、第八输出齿轮轴s8、右驱动轮(正转)。第八输出齿轮轴s8正转和第九输出齿轮轴s9反转分别同步传送给履带车辆右驱动轮正转,左驱动轮反转,实现履带车辆后退时向右转向,如图8所示。是快速后退时右转还是快速原地右转,与履带车辆在转向前的状态有关,右转向前静止,右转向时就是快速原地右转,右转向
前快速后退,右转向时就是快速后退过程中右转。
[0117]
(2).当该传动箱中的第一转速电磁离合器c1处于断开状态,第二转速电磁离合器c2处于接合状态,则能够控制履带车辆慢速前进(参见图9)、慢速后退(参见图10)、慢速前进时左转向或者原地左转向(参见图11)、慢速前进时右转向或者原地右转向(参见图12)、慢速后退时左转向或者原地左转向(参见图13)、慢速后退时右转向或者原地右转向(参见图14)。
[0118]
该种情形与本实施例3中第(1)部分的内容主要区别在于:动力传递给第三齿轮轴s3或第四齿轮轴s4的路径不同。
[0119]
具体地说,履带车辆在慢速前进、慢速前进时左转向、慢速原地左转向、慢速前进时右转向、慢速原地右转向时,动力是经动力输出轴(正转)、第一转速轴s1、第一转速齿轮z1、外齿轮10(反转)、外齿轮11(正转)、第二转速齿轮z2(反转)、第二转速轴s2(反转)、第二转速电磁离合器c2、第四齿轮轴s4、第四齿轮z4、第三齿轮z3(正转)带动第三齿轮轴s3转动(正转)。而在本实施例3中第(1)部分中,履带车辆在快速前进、快速前进时左转向、快速原地左转向、快速前进时右转向、快速原地右转向时,动力是动力输出轴(正转)、第一转速轴s1、第一转速电磁离合器c1带动第三齿轮轴s3转动(正转)。
[0120]
履带车辆在慢速后退、慢速后退时左转向、慢速原地左转向、慢速后退时右转向、慢速原地右转向时,动力是经动力输出轴(正转)、第一转速轴s1、第一转速齿轮z1、外齿轮10(反转)、外齿轮11(正转)、第二转速齿轮z2(反转)、第二转速轴s2(反转)、第二转速电磁离合器c2带动第四齿轮轴s4转动(反转)。而在本实施例3中第(1)部分中,履带车辆在快速后退、快速后退时左转向、快速原地左转向、快速后退时右转向、快速原地右转向时,动力是动力输出轴(正转)、第一转速轴s1、第一转速电磁离合器c1、第三齿轮轴s3、第三齿轮 z3、第四齿轮z4(反转)带动第四齿轮轴s4转动(反转)。
[0121]
其它内容与本实施例3中第(1)部分的内容基本相同,不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1