一种具备多轴向抗高过载能力的舵机的制作方法
1.本发明涉及电动伺服领域,具体涉及一种具备多轴向抗高过载能力的舵机。
背景技术:
2.随着制导炮弹技术不断发展,远程高过载制导炮弹在炮膛发射时会承受短时间的多轴向高过载冲击,对弹内伺服机构提出了较高的设计要求。舵机是飞行器控制系统中的执行机构,其性能直接决定飞行器的控制品质,炮射工况下对舵机的多轴向抗高过载能力要求较高。
3.一种抗高过载的舵机减速器(cn 205383244)只有一路传动,在输出轴末级通过齿轮副传动,对齿轮的承载能力和空间要求较高,而三级传动设计占用空间较大,难以满足小型紧凑的空间要求。抗高过载集成化舵机(cn105659798b)采用直齿轮副—锥齿轮副—谐波齿轮—连杆机构的传动系统,四级传动更为复杂,零部件连接更多,在多轴向高过载环境下机构破坏的可能性更大,也导致空间占用更大,难以满足小型紧凑的空间要求和可靠性要求。电动舵机(cn 208026150 u)两套传动系统控制两对舵,不能同时控制俯仰、偏航和滚转,且缺少输出端传感器,不能实现闭环控制,难以保证控制精度,影响飞行器控制品质。
4.目前国内现有武器型号的舵机体积和质量较大,在承受12000g以上的炮射冲击过载条件下,零部件容易发生塑性变形甚至破坏,难以满足多轴向高过载冲击后正常工作的条件。因此,针对上述问题,如何在有限空间内,克服制导炮弹高过载冲击环境的难点,设计一种具备多轴向抗高过载能力的舵机,成为了本领域技术人员亟待解决的重要技术问题。
技术实现要素:
5.针对上述的工况,本发明要解决的技术难点是多轴向抗高过载,提供了一种具备多轴向抗高过载能力的舵机。
6.本发明属于电动伺服领域,具体设计一种具备多轴向抗高过载能力的舵机,包括电机支架、伺服电机、电机齿轮、框架、金属减振垫、支撑块、角度传感器、轴承压板、调节垫片、碟簧、蜗杆齿轮组合、蜗轮舵轴组合、传感器齿轮;四路传动,共用一个框架,在空间上各占一个象限,四个伺服电机共用一个电机支架;每路传动分别通过伺服电机—电机齿轮—蜗杆齿轮组合—蜗轮舵轴组合传递动力,角度传感器与蜗轮舵轴组合啮合,实现对输出角的测量反馈,实现闭环控制;所述舵轴蜗轮组合中与传感器齿轮啮合的反馈齿轮,与蜗轮进行了一体化共齿形设计;电机支架与框架之间设计有金属减振垫;所述框架四周设置支撑块;轴承压板压紧蜗杆和角接触轴承,轴承压板与框架间设计有调节垫片,可实现对轴承预紧力的调节,轴承压板与角接触轴承间设计有碟簧,可实现轴向缓冲的作用。
7.优选的,所述的蜗杆齿轮组合包括蜗杆、蜗杆齿轮和角接触轴承,常用的深沟球轴承主要承受径向力,轴向承载能力弱,而选用的角接触轴承有更好的轴向和径向承载能力,能更好的满足多轴向高过载条件要求。
8.优选的,所述的蜗轮舵轴组合包括蜗轮、舵轴、滑动轴承1和滑动轴承2,常用的深
沟球轴承虽然能够承受径向力,但在高过载条件下仍难以满足要求,内部滚珠有破坏风险,选用的滑动轴承可以满足更高的过载要求。
9.优选的,所述的舵机的每路传动分别通过伺服电机—电机齿轮—蜗杆齿轮组合—蜗轮舵轴组合传递动力,反馈传感器与蜗轮舵轴组合啮合,实现对输出角的测量反馈,实现闭环控制;
10.优选的,所述的电机支架与框架之间设计有金属减振垫,实现在高过载工况下的减振缓冲作用,保护伺服电机,金属减震垫变形使电机在轴向的微小窜动不影响齿轮副的传动;
11.优选的,所述的轴承压板压紧蜗杆和角接触轴承,轴承压板与框架间设计有调节垫片,可实现对轴承预紧力的调节,轴承压板与角接触轴承间设计有碟簧,可实现轴向缓冲的作用;
12.优选的,所述的四套舵机的框架为一体化设计而不是四个分体,这样可以有效提高整体的结构强度,减少零部件间的连接,提高抗高过载能力;
13.优选的,所述的舵轴蜗轮组合上与传感器齿轮啮合的反馈齿轮,与蜗轮进行了一体化共齿形设计,减少了零件和紧固件的连接,提高加工和装配的工艺性,有效提高了抗高过载能力;
14.优选的,所述的舵机框架四周的支撑块不仅可以有效防止多余物进入传动机构,还能提高框架整体的抗高过载能力。
附图说明
15.下面结合附图对发明作进一步说明:
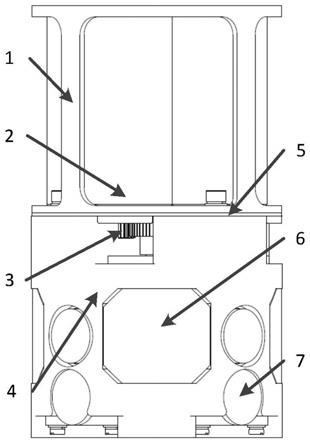
16.图1为本发明实施例的舵机结构示意图;
17.图2为本发明实施例的传动机构示意图;
18.图3为本发明实施例的蜗杆齿轮组合示意图;
19.图4为本发明实施例的蜗轮舵轴组合示意图;
20.图5为本发明实施例的框架应力云图(有支撑块);
21.图6为本发明实施例的框架应力云图(无支撑块)。
具体实施方式
22.以下结合附图和具体实施例对本发明提出的一种具备多轴向抗高过载能力的舵机作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
23.本发明提供了一种具备多轴向抗高过载能力的舵机,如图1、图2所示,其特征在于包括:电机支架1、伺服电机2、电机齿轮3、框架4、金属减振垫5、支撑块6、角度传感器7、轴承压板8、调节垫片9、碟簧10、蜗杆齿轮组合11、蜗轮舵轴组合12、传感器齿轮13。
24.所述的舵机包括四路传动,共用一个框架,在空间上各占一个象限,四个伺服电机共用一个电机支架。
25.所述的蜗杆齿轮组合11包括蜗杆1101、蜗杆齿轮1102和角接触轴承1103,如图3所
示,常用的深沟球轴承主要承受径向力,轴向承载能力弱,而选用的角接触轴承有更好的轴向和径向承载能力,能够满足多轴向高过载要求。
26.所述的蜗轮舵轴组合12包括舵轴1201、蜗轮1202、滑动轴承a1203和滑动轴承b1204,如图4所示,常用的深沟球轴承虽然能够承受径向力,但在高过载条件下内部滚珠有破坏风险,选用的滑动轴承可以满足多轴向高过载要求。
27.所述的舵机的每路传动分别通过伺服电机2—电机齿轮3—蜗杆齿轮组合11—蜗轮舵轴组合12传递动力,角度传感器7与蜗轮舵轴组合12啮合,对输出角测量反馈,实现舵机闭环控制;
28.所述的电机支架1与框架4之间设计有金属减振垫5,实现在高过载工况下的减振缓冲作用,保护伺服电机2,金属减震垫5变形使电机在轴向的微小窜动不影响齿轮副的传动;
29.所述的轴承压板8压紧蜗杆1102和角接触轴承1103,轴承压板8与框架4间设计有调节垫片9,可实现对轴承预紧力的调节,轴承压板8与角接触轴承1103间设计有碟簧10,可实现轴向缓冲的作用。
30.所述的四套舵机的框架4为一体化设计而不是四个分体,这样可以有效提高整体的结构强度,减少零部件间的连接,有效提高了抗高过载能力;
31.所述的舵轴蜗轮组合11中与传感器齿轮13啮合的反馈齿轮,与蜗轮进行了一体化共齿形设计,减少了零件和紧固件的连接,提高加工和装配的工艺性,有效提高了抗高过载能力;
32.所述的舵机框架4四周的支撑块6不仅可以有效防止多余物进入传动机构,还能提高框架整体的抗高过载能力。
33.在一个实施例中,相关传动参数如下:
34.电机齿轮副的模数m2=1,
35.电机齿轮齿数z1=17,
36.蜗杆齿轮齿数z2=51,
37.传动比i1=3;
38.蜗轮蜗杆副的模数m1=1,
39.蜗杆头数z1=1,
40.蜗轮齿数z2=45,
41.传动比i2=45;
42.从电机到输出端舵轴的总传动比i=i1*i2=135。
43.在一个实施例中,舵轴1201、蜗轮1202、蜗杆1102、电机齿轮3、蜗杆齿轮1102等零件都选用高强度钢材料,保证单个零件的抗高过载能力。而为了减小舵机整体质量,主体框架4部分选用强度高密度底的钛合金材料,对应力集中处进行倒钝倒圆设计释放应力,结合支撑块6设计,确保舵机整体的抗高过载能力。
44.在一个实施例中,对有无支撑块6设计的框架4进行强度校核,通过仿真对比分析其结构受力情况,结果如图5、图6所示。其中,在有支撑块6设计的情况下,框架4的最大应力值约705mpa,未超过材料的屈服极限;而没有支撑块设计的框架最大应力值约980mpa,超过了材料屈服极限,即将达到破坏极限。对比可见,支撑块6设计使舵机结构可以承受更高的
过载条件,安全系数更高。
45.显然,本领域的技术人员可以对本发明进行各种改动和变形而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1