用于多速自动变速器的手动换档控制系统和方法与流程
用于多速自动变速器的手动换档控制系统和方法
1.本专利申请是国际申请日为2017年4月10日、国家申请号为201780043729.9、发明名称为“用于多速自动变速器的手动换档控制系统和方法”的专利申请的分案申请。
技术领域
2.本公开内容涉及多速自动变速器,并且具体地涉及具有多个前进速度比率的多速自动变速器以及用于限制对该多个前进速度比率的手动选择的控制系统。
背景技术:
3.已知具有用于选择期望的前进速度比率的操作者接口的多速自动变速器和包含这种多速自动变速器的车辆。这种变速器基于支持第二前进速度比率的与车辆相关的一个或更多个操作特性来允许操作者改换由变速器控制电路选择的第一前进速度比率。在考虑车辆的燃料经济性、部件磨损和其他因素时可能不希望选择第二前进速度比率。
技术实现要素:
4.本公开内容提供了用于管理车辆的多速自动变速器的换档变化的系统和方法。该系统和方法可以限制操作者对多个前进速度比率的选择。
5.在贯穿本公开内容和权利要求的一些实例中,诸如第一、第二、第三和第四的数字术语用于指代各种组件、速度比率和其他项。这种用途并不旨在表示组件的顺序。相反,数字术语用于帮助读者辨识被引用的组件,并且不应被狭义地解释为提供特定的组件顺序。
6.在本公开内容的示例性实施方式中,提供了一种用于管理车辆的变速器的换档变化的系统。该系统包括多速自动变速器,多速自动变速器包括输入构件和可操作地耦合到输入构件的输出构件。多速自动变速器能够被配置于输入构件与输出构件之间的多个前进速度比率。该系统还包括:控制电路,控制电路可操作地耦合至多速自动变速器,控制电路将多速自动变速器配置成建立多个前进速度比率中的每一个;操作者接口,操作者接口可操作地耦合至控制电路并且包括具有至少一个操作者可选择换档请求输入的变速器换档选择器;以及多个操作特性监视器,该多个操作特性监视器监视与车辆相关的多个操作特性。控制电路将多速自动变速器配置于多个前进速度比率中的第一前进速度比率。响应于从操作者接口接收到建立多个前进速度比率中的第二前进速度比率的请求,如果多个操作特性满足换档准则逻辑,则控制电路将多速自动变速器配置于第二前进速度比率,而如果多个操作特性不满足换档准则逻辑,则控制电路将多速自动变速器维持于第一前进速度比率。
7.在其一个示例中,多个操作特性监视器中的第一操作特性监视器提供车辆的移动特性的指示,当移动特性具有第一值时,控制电路将多速自动变速器配置于第二前进速度比率,而当移动特性具有第二值时,控制电路将多速自动变速器维持于第一前进速度比率。在其变型中,移动特性是车辆相关速度特性,并且第一值低于车辆相关速度阈值,并且第二值高于车辆相关速度阈值。在其又一变型中,第一操作特性监视器是车辆速度传感器。在其
另一变型中,移动特性是道路坡度特性,并且第一值低于道路坡度阈值,并且第二值高于道路坡度阈值。在其进一步的变型中,道路坡度由由车辆支撑的车辆倾斜度传感器来确定。在其又一变型中,道路坡度通过将车辆的当前位置与已知道路坡度的映射图关联来确定。在其又一变型中,车辆包括提供车辆的当前位置的指示的gps接收器。在其另一变型中,移动特性是发动机负荷特性,并且第一值低于发动机负荷阈值,并且第二值高于发动机负荷阈值。
8.在其又一示例中,多个操作特性监视器中的第二操作特性监视器提供车辆的操作者接口输入特性的指示,当操作者接口输入特性具有第一值时,控制电路将多速自动变速器配置于第二前进速度比率,而当操作者接口输入特性具有第二值时,控制电路将多速自动变速器维持于第一前进速度比率。在其变型中,操作者接口输入特性是基于操作者接口的油门控制输入的油门操作者接口输入特性。在其另一变型中,操作者接口输入特性是基于操作者接口的行车制动输入的行车制动操作者接口输入特性。在其另一变型中,操作者接口输入特性是基于操作者接口的发动机制动输入的发动机制动操作者接口输入特性。在其又一变型中,操作者接口输入特性是基于操作者接口的巡航控制输入的巡航控制操作者接口输入特性。
9.在其另一示例中,多个操作特性监视器中的第三操作特性监视器提供车辆的车辆负荷特性的指示,当车辆负荷特性具有第一值时,控制电路将多速自动变速器配置于第二前进速度比率,而当车辆负荷特性具有第二值时,控制电路将多速自动变速器维持于第一前进速度比率。
10.在其又一示例中,系统还包括对象检测器,其中,在多个操作特性不满足换档准则逻辑的情况下,如果对象检测器在车辆的包络内检测到对象,则控制电路仍然将建立第二前进速度比率。
11.在其又一示例中,多个操作特性监视器提供道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示、油门控制操作者接口输入特性的指示以及行车制动操作者接口输入特性的指示,当道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示、油门控制操作者接口输入特性的指示以及行车制动操作者接口输入特性的指示具有满足换档准则逻辑的第一组值时,控制电路将多速自动变速器配置于第二前进速度比率,而当道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示、油门控制输入状态特性的指示以及行车制动输入状态特性的指示具有不满足换档准则逻辑的第二组值时,控制电路将多速自动变速器维持于第一前进速度比率。
12.在其另一示例中,多个操作特性监视器提供道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示以及油门控制操作者接口输入特性的指示,换档准则逻辑确定道路坡度特性的指示是否高于道路坡度阈值,如果是,则换档准则逻辑得以满足。在其变型中,如果道路坡度特性的指示低于道路坡度阈值,则换档准则逻辑确定车辆相关速度特性的指示是否低于车辆相关速度阈值,如果是,则换档准则逻辑得以满足。在其另一变型中,如果车辆相关速度特性的指示高于车辆相关速度阈值,则换档准则逻辑确定油门控制操作者接口输入特性的指示是否高于油门阈值,如果是,则换档准则逻辑不满足。在其又一变型中,如果油门控制操作者接口输入特性低于油门阈值,则换档准则逻辑确定发动机负荷特性的指示是否高于发动机负荷阈值,如果是,则换档准则逻辑不满足。在其另一变
型中,多个操作特性中的第一操作特性被监视,并且如果第一操作特性具有第一值,则控制电路使用换档准则逻辑来确定是要维持多个前进速度比率中的第一前进速度比率还是将多速自动变速器配置于多个前进速度比率中的第二前进速度比率,而如果第一操作特性具有第二值,则控制电路使用替选的换档准则逻辑来确定是要维持多个前进速度比率中的第一前进速度比率还是将多速自动变速器配置于多个前进速度比率中的第二前进速度比率。
13.在本公开内容的另一示例性实施方式中,提供了一种用于管理车辆的多速自动变速器的换档变化的方法。该方法包括下述步骤:接收来自位于车辆的操作者空间中的操作者接口的多速变速器换档选择器的、将多速自动变速器从第一前进速度比率换档至第二前进速度比率的请求;监视车辆的多个操作特性;响应于接收到上述请求,当多个操作特性满足换档准则逻辑时将多速自动变速器换档至第二前进速度比率,并且当多个操作特性不满足换档准则逻辑时将多速自动变速器维持于第一前进速度比率。
14.在其一个示例中,该方法还包括下述步骤:接收车辆的当前位置,其中,多个操作特性中的至少一个基于车辆的当前位置。
15.在其另一示例中,该方法还包括下述步骤:在车辆附近的包络中监视对象;以及检测车辆附近的对象,其中,响应于检测到车辆附近的对象,换档准则逻辑得以满足。
16.在其又一示例中,该方法还包括下述步骤:监视道路坡度特性的指示;监视车辆相关速度特性的指示;监视发动机负荷特性的指示;以及监视油门控制输入的油门控制操作者接口输入特性的指示。在其变型中,该方法还包括下述步骤:确定道路坡度特性的指示是否高于道路坡度阈值,如果是,则换档准则逻辑得以满足;如果道路坡度特性的指示低于道路坡度阈值,则确定车辆相关速度特性的指示是否低于车辆相关速度阈值,如果是,则换档准则逻辑得以满足;如果车辆相关速度特性的指示高于车辆相关速度阈值,则基于油门控制操作者接口输入特性的指示来确定操作者是否致动了油门控制输入,如果是,则换档准则逻辑不满足;如果油门控制操作者接口输入特性指示操作者未致动车辆的油门控制输入,则确定发动机负荷特性的指示是否高于发动机负荷阈值,如果是,则换档准则逻辑不满足;而如果发动机负荷特性低于发动机负荷阈值,则换档准则逻辑得以满足。
17.在本公开内容的又一示例性实施方式中,提供了一种用于管理车辆的变速器的换档变化的系统。该系统包括:多速自动变速器,多速自动变速器包括输入构件和可操作地耦合至输入构件的输出构件,多速自动变速器能够被配置于输入构件与输出构件之间的多个前进速度比率;位置确定器,位置确定器提供车辆的当前位置的指示;以及控制电路,控制电路可操作地耦合至多速自动变速器和位置确定器,控制电路将多速自动变速器配置成建立多个前进速度比率中的每一个,控制电路基于车辆的当前位置的指示来将多速自动变速器从第一前进速度比率换档至第二前进速度比率。
18.在其一个示例中,该系统还包括车辆的操作者接口的变速器换档选择器,控制电路基于车辆的当前位置的指示和来自变速器换档选择器的将多速自动变速器换档至第二前进速度比率的请求来将变速器从第一前进速度比率换档至第二前进速度比率。
19.在其另一示例中,该系统还包括操作者接口,操作者接口可操作地耦合至控制电路并且包括具有至少一个操作者可选择换档请求输入的变速器换档选择器;以及多个操作特性监视器,该多个操作特性监视器监视与车辆相关的多个操作特性,其中,控制电路响应于从操作者接口接收到建立多个前进速度比率中的第二前进速度比率的请求,如果多个操
作特性满足换档准则逻辑,则控制电路将多速自动变速器配置于第二前进速度比率,而如果多个操作特性不满足换档准则逻辑,则控制电路将多速自动变速器维持于第一前进速度比率。位置确定器是多个操作特性监视器之一。在其一个变型中,多个操作特性监视器中的第一操作特性监视器提供车辆的移动特性的指示,当移动特性具有第一值时,控制电路将多速自动变速器配置于第二前进速度比率,而当移动特性具有第二值时,控制电路将多速自动变速器维持于第一前进速度比率。在其另一变型中,移动特性是车辆相关速度特性,并且第一值低于车辆相关速度阈值,并且第二值高于车辆相关速度阈值。在其又一变型中,第一操作特性监视器是车辆速度传感器。在其另一变型中,移动特性是道路坡度特性,并且第一值低于道路坡度阈值,并且第二值高于道路坡度阈值。在其进一步的变型中,道路坡度由由车辆支撑的车辆倾斜度传感器来确定。在其另一变型中,道路坡度通过将车辆的当前位置的指示与已知道路坡度的映射图关联来确定。在其另一变型中,移动特性是发动机负荷特性,并且第一值低于发动机负荷阈值,并且第二值高于发动机负荷阈值。在其另一变型中,多个操作特性监视器提供道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示、油门控制操作者接口输入特性的指示以及行车制动操作者接口输入特性的指示,当道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示、油门控制操作者接口输入特性的指示以及行车制动操作者接口输入特性的指示具有满足换档准则逻辑的第一组值时,控制电路将多速自动变速器配置于第二前进速度比率,而当道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示、油门控制输入状态特性的指示以及行车制动输入状态特性的指示具有不满足换档准则逻辑的第二组值时,控制电路将多速自动变速器维持于第一前进速度比率。在另一变型中,多个操作特性监视器提供道路坡度特性的指示、车辆相关速度特性的指示、发动机负荷特性的指示以及油门控制操作者接口输入特性的指示,换档准则逻辑确定道路坡度特性的指示是否高于道路坡度阈值,如果是,则换档准则逻辑得以满足。在其另一变型中,如果道路坡度特性的指示低于道路坡度阈值,则换档准则逻辑确定车辆相关速度特性的指示是否低于车辆相关速度阈值,如果是,则换档准则逻辑得以满足。在其又一变型中,如果车辆相关速度特性的指示高于车辆相关速度阈值,则换档准则逻辑确定油门控制操作者接口输入特性的指示是否高于油门阈值,如果是,则换档准则逻辑不满足。在另一变型中,如果油门控制操作者接口输入特性低于油门阈值,则换档准则逻辑确定发动机负荷特性的指示是否高于发动机负荷阈值,如果是,则换档准则逻辑不满足。在其又一变型中,多个操作特性中的第一操作特性被监视,并且如果第一操作特性具有第一值,则控制电路使用换档准则逻辑来确定是要维持多个前进速度比率中的第一前进速度比率还是将多速自动变速器配置于多个前进速度比率中的第二前进速度比率,而如果第一操作特性具有第二值,则控制电路使用替选的换档准则逻辑来确定是要维持多个前进速度比率中的第一前进速度比率还是将多速自动变速器配置于多个前进速度比率中的第二前进速度比率。
20.在其另一示例中,多个操作特性监视器中的第二操作特性监视器提供车辆的操作者接口输入特性的指示,当操作者接口输入特性具有第一值时,控制电路将多速自动变速器配置于第二前进速度比率,而当操作者接口输入特性具有第二值时,控制电路将多速自动变速器维持于第一前进速度比率。在其变型中,操作者接口输入特性是基于操作者接口的油门控制输入的油门操作者接口输入特性。在其另一变型中,操作者接口输入特性是基
于操作者接口的行车制动输入的行车制动操作者接口输入特性。在其又一变型中,操作者接口输入特性是基于操作者接口的发动机制动输入的发动机制动操作者接口输入特性。在其再一变型中,操作者接口输入特性是基于操作者接口的巡航控制输入的巡航控制操作者接口输入特性。
21.在其另一示例中,多个操作特性监视器中的第三操作特性监视器提供车辆的车辆负荷特性的指示,当车辆负荷特性具有第一值时,控制电路将多速自动变速器配置于第二前进速度比率,而当车辆负荷特性具有第二值时,控制电路将多速自动变速器维持于第一前进速度比率。
22.在又一示例中,系统还包括对象检测器,其中,在多个操作特性不满足换档准则逻辑的情况下,如果对象检测器在车辆的包络内检测到对象,则控制电路仍然将建立第二前进速度比率。
23.在又一示例中,位置确定器是gps接收器。
24.在本公开内容的又一示例性实施方式中,提供了一种用于管理车辆的多速自动变速器的换档变化的方法。该方法包括下述步骤:接收来自位于车辆的操作者空间中的操作者接口的变速器换档选择器的、将多速自动变速器从第一前进速度比率换档至第二前进速度比率的请求;监视车辆的当前位置;以及响应于接收到上述请求,部分地基于车辆的当前位置来确定是否要将多速自动变速器换档至第二前进速度比率。
25.在其一个示例中,该方法还包括基于车辆的当前位置确定道路坡度特性的步骤。
26.在本公开内容的另一示例性实施方式中,提供了一种用于管理车辆的变速器的换档变化的系统。该系统包括:多速自动变速器,多速自动变速器包括输入构件和可操作地耦合至输入构件的输出构件,多速自动变速器能够被配置于输入构件与输出构件之间的多个前进速度比率;控制电路,控制电路可操作地耦合至变速器,控制电路将多速自动变速器配置成建立多个前进速度比率中的每一个;操作者接口,操作者接口可操作地耦合至控制电路并且包括具有至少一个操作者可选择换档请求输入的变速器换档选择器;以及对象检测器,对象检测器监视车辆附近的包络中对象的存在,其中,控制电路将多速自动变速器配置成建立多个前进速度比率中的第一前进速度比率,并且响应于从操作者接口接收到建立多个前进速度比率中的第二前进速度比率的请求,如果对象检测器在车辆附近的包络内检测到对象,则控制电路将多速自动变速器配置成建立第二前进速度比率。
27.在本公开内容的另一示例性实施方式中,提供了一种用于管理车辆的多速自动变速器的换档变化的方法。该方法包括下述步骤:接收来自位于车辆的操作者空间中的操作者接口的变速器换档选择器的、将多速自动变速器从第一前进速度比率换档至第二前进速度比率的请求;在车辆附近的包络中监视对象;以及响应于接收到上述请求,部分地基于对象是否在车辆附近的包络内来确定是否要将多速自动变速器换档至第二前进速度比率。
附图说明
28.通过参照以下结合附图对示例性实施方式的描述,本公开内容的上述和其他特征和优点以及实现这些特征和优点的方式将变得更明显并且将被更好地理解,在附图中:
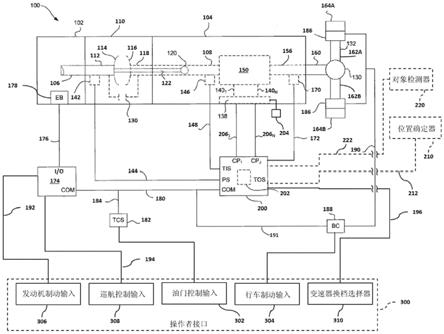
29.图1示出了具有多速自动变速器的动力车辆系统的一个说明性实施方式的框图和示意图;
30.图2示出了图1中的多速自动变速器的多个前进速度比率的代表图;
31.图3a示出了图1中的动力车辆系统的具有多个行星齿轮组和多个选择性耦合器的示例性行星齿轮变速器的代表图;
32.图3b示出了图3a中的行星齿轮变速器的多个前进速度比率的代表图以及在图1中的动力车辆系统的变速器控制电路的换档逻辑中提供的对应的选择性耦合器配置;
33.图4a示出了图1中的动力车辆系统的第一示例性变速器换档选择器;
34.图4b示出了图1中的动力车辆系统的第二示例性变速器换档选择器;
35.图5示出了图1中的动力车辆系统的变速器控制电路的操作的代表图,其中,基于多个操作特性来允许或拒绝所请求的换档变化;
36.图6示出了图1中的动力车辆系统的变速器控制电路的操作的代表图,其中,基于包括移动特性和操作者接口输入特性的多个操作特性来允许或拒绝所请求的换档变化;
37.图7示出了图1中的动力车辆系统的变速器控制电路的操作的代表图,其中,基于包括道路坡度特性、车辆相关速度特性、油门输入特性、发动机负荷特性和行车制动输入特性的多个操作特性来允许或拒绝所请求的换档变化;
38.图8示出了图1中的动力车辆系统的变速器控制电路的换档准则逻辑的示例性处理序列;
39.图9示出了图1中的动力车辆系统的变速器控制电路的换档准则逻辑的另一示例性处理序列;
40.图10示出了图1中的动力车辆系统的变速器控制电路的换档准则逻辑的再一示例性处理序列;以及
41.图11示出了图1中的动力车辆系统的变速器控制电路的换档准则逻辑的又一示例性处理序列;
42.在这几个视图中,对应的附图标记指示对应的部件。本文中阐述的示例示出了本发明的示例性实施方式并且这些示例不应被解释为以任何方式限制本发明的范围。
具体实施方式
43.为了促进对本公开内容的原理的理解,现在将参照将在下文描述的附图所示的实施方式。以下公开的实施方式并不旨在是穷举的或着将本公开内容内容限制为以下详细描述中公开的精确形式。相反,选择和描述这些实施方式以使本领域其他技术人员可以利用这些实施方式的教示。因此,不旨在由此限制本公开内容的范围。在这几个视图中,对应的附图标记指示对应的部件。
44.现在参照图1,示出了车辆系统100的示例性示意图。车辆系统100包括可操作地连接到多速自动变速器104的原动机102。示例性原动机包括内燃机、电动马达、混合动力系统和其他合适的动力系统。
45.如本文中所使用的,术语多速自动变速器被定义为可配置于输出轴与输入轴的多个前进速度比率的变速器,其中,该变速器的配置通过变速器控制电路200来控制。如本文中所说明的,变速器控制电路200包括换档逻辑400,换档逻辑包括配置设置2521至252
l
(参见图2),其中l是等于2或更大的正整数,该配置设置用于将多速自动变速器104的各部件配置于相应的前进速度比率2501至250
l
。多速自动变速器还可以包括一个或更多个倒档速度
比率。示例性多速自动变速器包括自动变速器和自动手动变速器。
46.一种示例性自动变速器包括具有多个选择性耦合器的多个行星齿轮组,其由变速器控制电路200控制以将该变速器配置于各种前进速度比率。一种示例性自动手动变速器包括由输入轴承载的至少一个齿轮、由至少一个中间轴承载的至少一个齿轮、由输出轴承载的至少一个齿轮以及将齿轮和/或轴的各种布置耦合在一起以实现输出轴与输入轴的多个前进速度比率的多个同步器或耦合器。示例性自动手动变速器包括滑动网格变速器和恒定网格变速器。示例性多速自动变速器包括在换档期间从输入轴向输出轴连续地提供动力的变速器以及在换档期间中断从输入轴到输出轴的动力的变速器。
47.原动机102包括输出轴106,该输出轴可操作地连接到多速自动变速器104的输入轴108。在一个实施方式中,原动机102的输出轴106通过离合器(未示出)耦合至多速自动变速器104的输入轴108。在所示的实施方式中,原动机102通过变矩器110间接地使多速自动变速器104的输入轴108旋转。原动机102的输出轴106可旋转地驱动变矩器110的输入轴112。输入轴112固定地耦合至叶轮或泵114。变矩器110还包括耦合至涡轮轴118的涡轮116。在变矩器110中提供有耦合流体,使得泵114的旋转通过流体引起涡轮116和涡轮轴118的对应旋转。涡轮轴118耦合至多速自动变速器104的输入轴108。
48.在所示的实施方式中,变矩器110包括锁止离合器130。锁止离合器130连接在变矩器110的泵114与涡轮116之间。锁止离合器130在接合时提供泵114与涡轮116之间的固定耦合并且其在分离时允许涡轮116相对于泵114旋转。一般地,锁止离合器130在某些操作情况如车辆起动、低速以及某些档位换档情况期间分离。锁止离合器130通常以较高速度或针对多速自动变速器104的某些档位接合。在接合时,锁止离合器130将涡轮轴118固定地耦合至原动机102的输出轴106。
49.在所示的实施方式中,多速自动变速器104包括内部泵120,其用于在多速自动变速器104的不同流体流动回路(例如,主回路、润滑油回路等)内建立压力。泵120可以由耦合至原动机102的输出轴106的轴122驱动。因此,原动机102可以使轴122旋转以驱动内部泵120并且在多速自动变速器104的各种流体流动回路内建立压力。内部泵120还可以调节变矩器110中的流体压力。
50.在所示的实施方式中,多速自动变速器104包括多速行星变速器150。参照图3a,多速行星变速器150包括多个行星齿轮组152和可操作地耦合至多个行星齿轮组152的多个选择性耦合器154。每个行星齿轮组包括至少四个部件:太阳齿轮;齿圈;多个行星齿轮;以及可旋转地耦合至行星齿轮并且承载行星齿轮的托架。在简单的行星齿轮组的情况下,太阳齿轮的齿与行星齿轮的齿互相啮合,行星齿轮的齿又与齿圈的齿接合。这些部件中的每一个也可以称为齿轮组部件。多个行星齿轮组152的各自的行星齿轮组的太阳齿轮、行星托架和齿圈中的每一个可以固定地耦合至下述中的一个或更多个:输入轴108;多速行星变速器150的输出轴156;多个行星齿轮组中的一个或更多个的太阳齿轮、行星托架和齿圈中的另外一个或更多个;一个或更多个选择性耦合器;变速器的固定构件,例如壳体;以及以上的组合。
51.对于本领域技术人员将明显的是,一些行星齿轮组可以包括除明确标识的那些组件之外的其他组件。例如,一个或更多个行星齿轮组可以包括两组行星齿轮。第一组行星齿轮可以与太阳齿轮互相啮合,而第二组行星齿轮与第一组行星齿轮和齿圈互相啮合。两组
行星齿轮均由行星托架承载。尽管在图3a中多速自动变速器104被示为多速行星变速器150,但是多速自动变速器104可以替选地被构造成用于提供多个前进速度比率或档位的其他布置。
52.如本文中所使用的,选择性耦合器154是可以被致动以将两个或更多个组件固定地耦合在一起的装置。在选择性耦合器154处于接合配置时,选择性耦合器154固定地耦合两个或更多个部件以使其作为一个单元一起旋转。此外,在选择性耦合器呈分离配置时,两个或更多个组件会变得能够相对于彼此旋转。术语“耦合”、“耦合的”、“耦合器”及其变体用于包括下述二者:其中两个或更多个组件直接物理接触的布置以及其中两个或更多个组件彼此不直接接触(例如,经由至少第三组件来“耦合”组件)但仍然彼此协作或交互的布置。
53.第一示例性选择性耦合器是离合器166。离合器166在接合配置下将两个或更多个旋转组件彼此耦合以使得这两个或更多个旋转组件作为一个单元一起旋转,并且在分离位置中允许这两个或更多个旋转组件之间的相对旋转。示例性离合器可以是可换档摩擦锁紧多盘离合器、可换档形状锁紧爪形或锥形离合器、湿式离合器或任何其他已知形式的离合器。
54.第二示例性选择性耦合器是制动器168。制动器168在接合配置下将一个或更多个可旋转组件耦合至固定组件,以使该一个或更多个可旋转组件相对于该固定组件保持固定,并且在分离配置下允许一个或更多个组件相对于固定组件旋转。示例性制动器可以被配置为可换档摩擦锁紧盘式制动器、可换档摩擦锁紧带式制动器、可换档形状锁紧爪形或锥形制动器或者任何其他已知形式的制动器。
55.选择性耦合器154可以是有源控制装置或者是无源装置。示例性的有源控制装置包括液压致动的离合器或制动元件以及电致动的离合器或制动元件。回到图1,多速自动变速器104还包括电动液压系统138,该电动液压系统经由n个流体路径1401至140
n
流体地耦合至多速行星变速器150,其中n可以是任何正整数。响应于来自变速器控制电路200的控制信号2061至206
n
,电动液压系统138选择性地使流体流过一个或更多个流体路径1401至140
n
,从而控制多速行星变速器150的选择性耦合器154的接合或分离。
56.除了通过选择性耦合器154进行耦合之外,行星齿轮组152中的各种太阳齿轮、行星托架和齿圈都可以在所公开的变速器的操作中持续地被固定地耦合在一起。可以将组件永久地或可移除地固定地耦合在一起。可以通过花键连接、压配合、紧固件、焊接、机加工或成形的整体件的功能部分或其他合适的连接组件的方法将组件固定地耦合在一起。
57.在一个或更多个组件被固定地连接在一起时,一个或更多个旋转组件例如轴、鼓和其他组件可以被统称为互连器。互连器还可以固定地耦合至行星齿轮组152的一个或更多个齿轮组组件和/或一个或更多个选择性耦合器154。
58.多速行星变速器150将扭矩从输入轴108传递到输出轴156。此外,通过选择性地接合选择性耦合器154的各种组合,多速行星变速器150能够针对多个前进档或前进速度比率(输入轴108和输出轴156二者均沿同一方向旋转)和至少一个倒档或倒退速度比率(输入轴108和输出轴156沿相反方向旋转)来改变输出轴156对于输入轴108的速度比率。多速行星变速器150的各种档位之间的改变或换档是通过凭借对多个流体路径1401至140
n
内的流体压力的控制而选择性地控制选择性耦合器154的相应的接合和分离来实现的。
59.多速自动变速器104的输出轴156耦合至驱动轴160或与驱动轴160成一体。输出轴
156对驱动轴160的旋转进行驱动。驱动轴160耦合至诸如差速器的后驱动单元162。后驱动单元162耦合至轴162a和轴162b并且可旋转地驱动轴162a和轴162b,它们又驱动轮164a和轮164b。
60.返回图1,车辆系统100还包括变速器控制电路200。在所示的实施方式中,变速器控制电路200是基于微处理器的并且包括非暂态计算机可读介质202,该计算机可读介质包括存储在其中的处理指令,这些处理指令可由变速器控制电路200的微处理器执行以控制变矩器110的操作和多速自动变速器104的操作。非暂态计算机可读介质或存储器可以包括随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(例如,eprom、eeprom或闪速存储器)或者能够存储信息的任何其他有形介质。
61.例如,变速器控制电路200可以执行换档准则逻辑400(参见图5),换档准则逻辑通过控制线2061至206
n
向电动液压系统138提供控制信号以实现多速自动变速器104的各种配置从而得到各自的前进速度比率或齿轮比。在多速行星变速器150的情况下,换档逻辑400可以选择性地接合和分离各种选择性耦合器154,从而使得多速行星变速器150在行星齿轮组152的各种齿轮比或速度比率之间进行换档。本文中使用的术语“逻辑”包括在一个或更多个可编程处理器上执行的软件和/或固件、专用集成电路、现场可编程门阵列、数字信号处理器、硬连线逻辑或这些的组合。因此,根据实施方式,可以以任何适当的方式实现各种逻辑并且将根据本文中公开的实施方式保持各种逻辑。此外,包括逻辑的非暂态机器可读介质可以被认为呈现在任何有形形式的计算机可读载体内,所述计算机可读载体例如含有将使处理器执行本文描述的技术的计算机指令和数据结构的适当的集的固态存储器、磁盘和光盘。本公开内容设想了其他实施方式,在这些实施方式中,变速器控制电路200不是基于微处理器的,而是被配置成基于一组或更多组硬连线指令和/或存储在存储器单元144中的软件指令来控制变矩器110和/或多速自动变速器104的操作。此外,变速器控制电路200可以被包含在单个装置中或者是联网在一起的多个装置以提供本文中描述的功能。
62.变速器控制电路200接收可由换档准则逻辑400使用的多个输入以确定是否在多速自动变速器104的各种档位(例如所示实施方式中的多速行星变速器150的行星齿轮组152的各种档位)之间换档。参照图1,车辆系统100包括与多速自动变速器104和变矩器110中的一个相关联的多个传感器,并且这些传感器被配置成分别产生多速自动变速器104和变矩器110的一个或更多个操作状态的指示。传感器可以通过发送传感器信号来主动地提供指示或者通过使所监视的特性(例如电压、温度、压力或其他合适的特性)可被获得来被动地提供指示。传感器是一种类型的操作特性监视装置。
63.例如,变矩器110说明性地包括常规的速度传感器142,其被定位成提供输入轴112的旋转速度的指示,输入轴112的旋转速度也对应于原动机102的输出轴106的旋转速度。速度传感器142经由信号路径144连接至变速器控制电路200的泵速输入ps。变速器控制电路200以常规方式处理输入轴112的旋转速度的指示,以确定变矩器110的输入轴112的旋转速度并且因此确定原动机102的输出轴106的旋转速度。
64.以类似的方式,多速自动变速器104包括第一常规速度传感器146和第二常规速度传感器170,第一常规速度传感器146被定位成提供输入轴108的旋转速度的指示,输入轴108的旋转速度与变矩器119的涡轮轴118的旋转速度相同,第二常规速度传感器170被定位成提供输出轴156的旋转速度的指示。速度传感器146经由信号路径148电连接至变速器控
制电路200的变速器输入轴速度输入tis。变速器控制电路200以常规方式处理输入轴108的旋转速度的指示以确定输入轴108或涡轮轴118的旋转速度。速度传感器170经由信号路径172电连接至变速器控制电路200的变速器输出轴速度输入tos。变速器控制电路200以常规方式处理输出轴156的旋转速度的指示以确定输出轴156的旋转速度。
65.在所示的实施方式中,车辆系统100还包括原动机控制电路174(示例性地一个原动机控制电路),该原动机控制电路具有经由多个信号路径176电耦合至原动机102的输入/输出端口(i/o)。原动机控制电路174可以是常规的,并且可操作以控制和管理原动机102的整体操作。原动机102可以包括降低原动机102的速度的减速装置。示例性减速装置包括发动机制动器(eb)178(其是一种排气制动器)或其他合适的减速装置。原动机控制电路174可以经由信号路径176电气地且可操作地耦合至减速装置(eb)178以控制原动机102的速度。
66.原动机控制电路174还包括通信端口com,其经由一个或更多个信号路径180电连接至变速器控制电路200的类似的通信端口com。一个或更多个信号路径180通常被统称为数据链路。变速器控制电路200和原动机控制电路174可操作以通过传统方式经由一个或更多个信号路径180交换信息。在一个实施方式中,例如,变速器控制电路200和原动机控制电路174可操作以根据汽车工程师协会(sae)j
‑
1939通信协议以一个或更多个消息的形式经由一个或更多个信号路径180交换信息,然而本公开内容还设想了其他实施方式,其中变速器控制电路200和原动机控制电路174可操作以根据一个或更多个其他常规的通信协议经由一个或更多个信号路径180交换信息。
67.在图1中,车辆系统100还包括油门控制传感器(tcs)182,其与油门控制输入302电连通,油门控制输入302是位于车辆的操作者空间中的操作者接口300的一部分。如本文中更详细说明的,操作者接口300包括可由车辆的操作者致动或以其他方式启动的多个操作者输入。操作者输入是示例性类型的操作特性监视装置。
68.操作者接口300的每个操作者输入向变速器控制电路200和原动机控制电路174中的一者或两者提供操作者接口输入特性。油门控制输入302可以是可由操作者的脚致动的加速器踏板,并且油门控制传感器182监视该加速器踏板的位置。油门控制输入302可以是其他类型的可致动装置,包括手指触发器、油门控制杆和可被致动的其他合适的装置。当油门控制输入302被致动或触发时,油门控制输入302的位置可以被传送至油门控制传感器182或由油门控制传感器182测量。进而,油门控制传感器182可以通过信号路径180沿信号路径184向原动机控制电路174和变速器控制电路200发送对应的信号。在一个示例中,变速器控制电路200监视油门控制输入302是否被致动。在另一实施方式中,变速器控制电路200监视油门控制输入302已被致动的百分比量。
69.操作者接口300可以包括其他操作者输入。例如,操作者接口300包括行车制动输入304。车辆系统100包括行车制动器186,其可操作地耦合至轴162a和轴162b以分别控制轮164a、轮164b的速度。示例性行车制动输入304包括制动踏板、制动杆或者操作者可接近以控制行车制动器186的操作的其他机构。操作者可通过致动行车制动输入304来致动或以其他方式接合行车制动器186。在所示的实施方式中,行车制动器186由制动控制器(bc)188控制,制动控制器(bc)188接收来自行车制动输入304的输入并且通过控制线190控制行车制动器186的操作。在一个示例中,控制线190是液压管线并且制动控制器188提供足够的液压压力以致动行车制动器186以使轮164a和轮164b变慢。此外,制动控制器188被示例性地示
为通过信号路径191和180与变速器控制电路200和原动机控制电路174中的一者或两者连通。在一个示例中,变速器控制电路200监视行车制动输入304是否被致动。
70.操作者接口300还包括发动机减速输入,其说明性地是发动机制动输入306。发动机制动输入306通过信号线192可操作地耦合至原动机控制电路174。示例性发动机制动输入包括开关、按钮、拨盘以及其他合适的输入构件。原动机控制电路174监视发动机制动输入306的状态(致动或不致动)或以其他方式接收发动机制动输入306的状态的指示,并且相应地设定发动机制动器或其他合适的发动机减速器178的配置。
71.操作者接口300还包括巡航控制输入308。巡航控制输入308通过信号线194可操作地耦合至原动机控制电路174。示例性巡航控制输入包括开关、按钮、拨盘以及其他合适的输入构件。原动机控制电路174监视巡航控制输入308的状态(致动或不致动)或以其他方式接收巡航控制输入308的状态的指示,并且相应地设定原动机102的配置。在一个实施方式中,原动机控制电路174配置原动机102使其进行操作以维持普遍恒定的对地速度。
72.操作者接口300还包括变速器换档选择器310。变速器换档选择器310通过一个或更多个信号线196可操作地耦合至变速器控制电路200。变速器换档选择器310向操作者提供多个输入,操作者通过这些输入可以向变速器控制电路200传送期望的档位设置。例如,操作者可以请求将多速自动变速器104置于前进档、倒档或空档配置下。此外,变速器换档选择器310可以向操作者提供用于选择期望的前进档或速度比率的输入。变速器控制电路200监视变速器换档选择器310的状态或以其他方式接收变速器换档选择器310的状态的指示,并且相应地设定多速自动变速器104的配置。
73.参照图4a,示出了第一变速器操作者接口330。变速器操作者接口330包括壳体332,多个操作者可选择输入构件334安装至该壳体332。说明性地,操作者可选择输入构件334包括多个触敏键或按钮,每个触敏键或按钮被设置在安装至壳体330或与壳体330成一体的单独的井内。替选地,操作者可选择输入构件334可以包括安装至变速器操作者接口330或与变速器操作者接口330成一体的凸起或齐平安装的键或按钮。变速器操作者接口330还包括指示器348,其向车辆系统100的操作者提供对车辆系统100和多速自动变速器104中的一者或两者的状态的视觉反馈。示例性指示器348包括led显示器、lcd显示器、多个指示灯或其他合适的视觉指示器。在一个示例中,指示器348提供车辆系统100的车辆方向的视觉指示,即当前选择的多速行星变速器150的齿轮比以及一个或更多个故障代码(如果适用的话)。
74.操作者可选择输入构件334包括倒退(r)键或按钮输入336、空档(n)键或按钮输入338、前进(d)键或按钮输入340、模式(“模式”)键或按钮输入342、手动升档(
↑
)键或按钮输入344以及手动降档(
↓
)键或按钮输入346。变速器控制电路200响应于用户对(r)按钮输入336的选择而配置多速自动变速器104使其以倒档进行操作。变速器控制电路200响应于用户对(n)按钮输入338的选择而配置多速自动变速器104使其在空档状态下(其中前进档或倒档均不被接合)进行操作。变速器控制电路200响应于用户对(d)按钮输入340的选择而配置多速自动变速器104使其以前进档进行操作。
75.参照图3b,换档准则逻辑400可以将多速行星变速器150的行星齿轮组152配置成多个(w个)前进档或速度比率3501至350w,其中w是值至少等于2的正整数。在一个实施方案中,w等于或大于6。在另一实施方案中,w等于或大于9。前进档3501至350w中的每一个是基
于多速行星变速器150的选择性耦合器154的相应的接合配置3521至352w而建立的。在下述文献中公开了用于多速行星变速器150的示例性架构:于2015年10月21日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0116025号;于2015年10月22日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0116026号;于2015年10月22日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0116027号;于2015年10月22日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0116028号;于2015年10月22日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0116029号;于2016年1月21日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0138680号;于2016年1月21日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0138681号;于2016年1月21日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0138682号;于2014年8月7日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0040754号;以及于2014年8月12日提交的标题为multi
‑
speedtransmission的美国公开专利申请第2016/0047440号,其全部公开内容通过引用明确并入本文中。
76.变速器控制电路200的换档准则逻辑400基于各种输入和车辆系统100的期望的操作来选择要建立前进档2501至250
l
(对于多速行星变速器150而言是3501至350
w
)中的哪一个以及何时在前进档2501至250
l
(对于多速行星变速器150而言是3501至350
w
)之间进行切换。例如,换档准则逻辑400可以包括控制逻辑,该控制逻辑基于车辆系统100的期望的性能特性来确定在各种前进档2501至250
l
(对于多速行星变速器150而言是3501至350
w
)之间进行换档。示例性性能特性包括提高燃料经济性、减少制动组件的磨损和其他性能特性。在下述文献中公开了示例性控制逻辑:于2009年6月1日提交的标题为systemfordeterminingavehiclemass
‑
basedbreakpointforselectingbetweentwodifferenttransmissionshiftschedules的美国专利第8,332,108号;于2013年6月18日提交的标题为systemandmethodforoptimizingdownshiftingofatransmissionduringvehicledeceleration的美国专利第8,935,068号;于2013年3月15日提交的标题为device,system,andmethodforcontrollingtransmissiontorquetoprovidehillascentand/ordescentassistanceusingroadgrade的美国专利第9,365,201号;于2014年4月11日提交的标题为systemandmethodforautomaticneutralandautomaticreturn
‑
to
‑
rangeforusewithanautomatictransmission的美国公开专利申请第2015/0292615号;于2015年10月6日提交的标题为methodofsettingtransmissionshiftpointsinreal
‑
timebaseduponanengineperformancecurve的美国公开专利申请第2016/0025213号,其全部公开内容通过引用明确并入本文中。
77.返回图4a,变速器控制电路200响应于用户对“模式”按钮输入342的选择而配置多速行星变速器150以选择多速自动变速器104的某些操作模式。例如,多速自动变速器104可以具有用于取力(“pto”)操作的辅助输出轴。操作者可以通过“模式”按钮输入342选择启动辅助输出轴。“模式”按钮输入342也可以用于其他操作,例如清除故障代码。
78.如本文所提及的,换档准则逻辑400基于各种输入并且还基于车辆系统100的各种性能特性来在前进档2501至250
l
(对于多速行星变速器150而言是3501至350
w
)之间进行自动选择。存在下述示例:其中车辆系统100的操作者可能希望选出与由换档准则逻辑400选
择的当前的前进档2501至250
l
(对于多速行星变速器150而言是3501至350
w
)不同的前进档2501至250
l
(对于多速行星变速器150而言是3501至350
w
)。如图4a所示以及本文中所提及的,变速器操作者接口330包括手动升档(
↑
)输入344和手动降档(
↓
)输入346。变速器控制电路200响应于用户对手动升档(
↑
)输入344的选择来将多速自动变速器104(说明性地,多速行星变速器150)配置成选择与当前建立的多速自动变速器104的前进档相比下一个较高的前进档。例如,如果多速自动变速器104正以第三档进行操作,则对手动升档(
↑
)输入344的选择将使得变速器控制电路200的换档准则逻辑400将多速自动变速器104配置成以第四档进行操作,对于所示的多速行星变速器150而言是配置选择性耦合器154。以类似的方式,变速器控制电路200响应于用户对手动降档(
↓
)输入346的选择来将多速自动变速器104配置成选择与当前建立的多速自动变速器104的前进档相比下一个较低的前进档。例如,如果多速自动变速器104正以第三档进行操作,则对手动降档(
↓
)输入346的选择将使得变速器控制电路200的换档准则逻辑400将多速自动变速器104配置成以第二档进行操作,对于所示的多速行星变速器150而言是配置选择性耦合器154。如本文所示,换档准则逻辑400包括附加逻辑,该附加逻辑基于车辆系统100的附加特性来确定何时允许响应于对手动升档(
↑
)输入344或手动降档(
↓
)输入346的选择来对档位进行换档。
79.参照图4b,示出了第二示例性变速器操作者接口360。变速器操作者接口360包括壳体362,多个操作者可选择输入构件364安装至该壳体332。说明性地,操作者可选择输入构件364包括触敏的模式(“模式”)键或按钮输入366(类似于变速器操作者接口330的模式(“模式”)键或按钮输入342)以及换档杆366。变速器操作者接口360还包括指示器370(类似于变速器操作者接口330的指示器348),其向车辆系统100的操作者提供对车辆系统100和多速自动变速器104中的一者或两者的状态的视觉反馈。
80.换档杆368能够被手动致动到多个不同位置。多个不同位置中的每一个与提供给变速器控制电路200的不同输入信号对应。在所示的实施方式中,壳体362包括与换档杆368的多个不同位置相邻的视觉输入指示器,其用于向操作者提供对换档杆368的当前位置的视觉反馈。在图4b所示的实施方式中,换档杆368能够相对于壳体362移动到位置r、n、d、5、4、3、2和1中的任何位置。将换档杆368置于与r对应的位置使得变速器控制电路200将多速自动变速器104配置成以倒档进行操作。将换档杆368置于与n对应的位置使得变速器控制电路200对多速自动变速器104进行配置使其置于空档状态,其中前进档和倒档均不被接合。将换档杆368置于与d对应的位置使得变速器控制电路200将多速自动变速器104配置成以前进档进行操作。将换档杆368置于与数字1至5对应的位置之一使得变速器控制电路200将多速自动变速器104配置成以对应的前进档进行操作。例如,在所示的实施方式中,将换档杆368置于与“1”对应的位置使得变速器控制电路200对多速行星变速器150的选择性耦合器154进行配置以将该多速行星变速器150置于第一档。
81.在一个实施方式中,变速器控制电路200的换档准则逻辑400基于车辆系统100的期望性能特性来确定允许或拒绝操作者例如通过变速器操作者接口330的按钮输入344或按钮输入346或者通过变速器操作者接口360的换档杆368所请求的换档变化。示例性性能特性包括提高燃料经济性、减少制动组件的磨损和其他性能特性。
82.参照图5,变速器控制电路200从变速器换档选择器310接收操作者接口所请求换档变化410。换档准则逻辑400基于多个操作特性420来确定操作者接口请求的换档变换410
是否通过换档准则。如果通过换档准则,则变速器控制电路200允许发生所请求的换档变化,如框412所示。例如,如果多速行星变速器150处于第三档3503(参见图3b)并且操作者致动变速器操作者接口330的按钮输入346(参见图4a)以请求第二档3502,则换档准则逻辑400将更改多速行星变速器150的选择性耦合器154的配置以对应于选择性耦合器接合配置3522(参见图3b),其将多速行星变速器150置于第二档3522(参见图3b)。如果换档准则未被满足,则变速器控制电路200拒绝所请求的换档变化,如框414所示,并且多速行星变速器150保持于换档准则逻辑400选择的当前档位。
83.多个操作特性420由多个操作特性监视器监视。通过监视,操作特性监视器可以感测指示参数的值或者基于一个或更多个感测值和/或确定值来确定参数。
84.示例性操作特性420包括移动特性、车辆负荷特性、操作者接口输入特性以及其他合适的操作特性。换档准则逻辑400可以使用移动特性、车辆负荷特性和操作者接口输入特性中的一个或更多个来确定是允许所请求的换档变化(框412)还是拒绝所请求的换档变化(框414)。预期的是,换档准则逻辑400可以单独地或组合地使用任何数量的所公开的多个操作特性420来确定是允许所请求的换档变化(框412)还是拒绝所请求的换档变化(框414)。本文提供了各种示例。
85.在一个实施方式中,从移动特性、车辆负荷特性和操作者接口输入特性的组合的至少两个中选择至少一个操作特性420,并且换档准则逻辑400使用该操作特性来确定是允许所请求的换档变化(框412)还是拒绝所请求的换档变化(框414)。图6示出了一个示例,其中,换档准则逻辑400使用第一移动特性422、第二移动特性424、第一操作者接口输入特性426和第二操作者接口输入特性428来确定是允许所请求的换档变化(框412)还是拒绝所请求的换档变化(框414)。
86.示例性移动特性包括道路坡度、车辆相关速度、发动机负荷、当前变速器档位、与周围对象的接近度以及与车辆系统100所经过的地形或车辆系统100的当前移动相关的其他合适的特性。
87.在一个实施方式中,道路坡度特性由倾斜度传感器监视。示例性倾斜度传感器是由车辆系统100支撑的加速度计204。如图1所示,加速度计204由多速自动变速器104的电动液压系统138支撑。替选地,加速度计可以被内设置在变速器控制电路200内、可以被内设置在原动机控制电路174内、可以由多速自动变速器支撑、可以由驱动单元102或车辆系统100的另一组件支撑。在任何情况下,加速度计204可以连续地测量道路坡度并将测量结果传送到变速器控制电路200。在下述文献中提供了关于道路坡度测量的其他细节:于2013年6月18日提交的标题为system and method for optimizing downshifting of a transmission during vehicle deceleration的美国公开专利申请第2014/0336890号,其全部公开内容通过引用明确地并入本文中。
88.在另一实施方式中,基于车辆系统100的当前位置来监视道路坡度特性。参照图1,在一个实施方式中,车辆系统100包括位置确定器210,该位置确定器提供车辆系统100的当前位置,例如经度坐标和纬度坐标。示例性位置确定器包括基于轨道卫星的信号来确定车辆系统100的位置的gps接收器和用于确定车辆系统100的位置的其他合适的装置。变速器控制电路200已存储了针对各种位置的道路坡度值的映射图或者包括从远程计算设备检索道路坡度信息的通信装置,例如蜂窝收发器。在一个示例中,位置确定器210通过信号线212
向变速器控制电路200提供车辆系统100的当前位置的指示。在另一示例中,位置确定器210通过无线连接向变速器控制电路200提供车辆系统100的当前位置的指示。在另一示例中,位置确定器210通过信号线180从原动机控制电路174向变速器控制电路200提供车辆系统100的当前位置的指示。
89.在一个实施方式中,由速度传感器170监视车辆相关速度。基于输出轴156的旋转速度,变速器控制电路200可以确定对车辆速度的估计。在替选实施方式中,可以使用一个或更多个发动机102速度(由速度传感器142测量的输出轴106的旋转)、涡轮116速度(由速度传感器146测量的涡轮轴118的旋转)、由原动机控制电路174传送的车辆速度、多速自动变速器104的中间轴的旋转速度以及确定车辆系统100或者其速度与车辆系统100的速度成比例的组件的速度的其他合适的装置和方法来监视车辆相关速度。在另一实施方式中,基于来自位置确定器210的间隔开的读数,变速器控制电路200可以基于位置值和时间间隔来估计车辆速度。除了车辆速度之外,可以通过确定车辆相关速度随时间的变化来监视车辆相关的加速或减速。
90.在一个实施方式中,发动机负荷由速度传感器170监视或者由原动机控制电路174传送。在一个实施方式中,发动机负荷是发动机扭矩的量度。在另一实施方式中,发动机负荷是发动机马力的量度。发动机负荷提供原动机102的需求的指示。在一个实施方式中,在内燃机的情况下,基于向原动机102提供燃料的比率来估计发动机负荷。较高的燃料比可以指示车辆系统100的加速或车辆系统100在较高的每分钟转数下进行的操作,而较低的燃料比可以指示车辆系统100的减速或车辆系统100在较低的每分钟转数下进行的操作。对发动机负荷的监视对于可能不会致动油门控制输入302但原动机102不空转的情况而言可能是有益的。例如,如果巡航控制输入308被致动,则不会致动油门控制输入302并且原动机102以高于空转的速度运行以推进车辆系统100。
91.在一个实施方式中,由变速器控制电路200监视当前变速器档位。在所示实施方式中,变速器控制电路200通过控制多速行星变速器150的选择性耦合器154的配置来选择当前档位。例如,换档准则逻辑400可以仅允许针对多速行星变速器150的某些当前档位所请求的换档变化410。在一个示例中,多速行星变速器150包括至少七个前进档并且变速器控制电路200仅在多速行星变速器150的当前档位为第五档或更低时允许所请求的换档变化,并且在当前档位是第六档或更高时拒绝所请求的换档变化。如本文所提及的,可以将各种多个操作特性420中的多个操作特性组合在一起以形成换档准则逻辑400。例如,对于刚刚提供的示例,当前档位设置是用于确定是允许还是拒绝操作者接口所请求的换档变化410的一个参数,并且使用了至少一个附加参数,例如道路坡度和行车制动的状态。
92.在一个实施方式中,通过车辆系统100的对象检测器220(参见图1)监视与周围对象接近度特性。示例性对象检测器包括雷达装置、超声波收发器、相机和用于监视车辆系统100附近空间的其他合适的装置。在一个示例中,对象检测器220通过信号线222向变速器控制电路200提供车辆系统100的指定包络内的对象的检测结果的指示或者到检测到的对象的距离值的指示。在另一示例中,对象检测器220通过无线连接向变速器控制电路200提供车辆系统100的指定包络内的对象的检测结果的指示或者到检测到的对象的距离值的指示。在另一示例中,对象检测器220通过信号线180从原动机控制电路174向变速器控制电路200提供车辆系统100的指定包络内的对象的检测结果的指示或者到检测到的对象的距离
值的指示。
93.示例性操作者接口输入特性包括发动机制动输入306的状态、巡航控制输入308的状态、油门控制输入302的状态、行车制动输入304的状态以及可由车辆系统100的操作者致动的操作者控制的其他合适的状态指示。
94.在一个实施方式中,油门控制输入302是设置在车辆系统100的操作者空间中的脚踏板。正如已知的,在内燃机的情况下,压下脚踏板导致原动机控制电路174向发动机提供更多燃料。在一个示例中,油门控制传感器182监视脚踏板被按压的百分比量并将其报告给变速器控制电路200。在另一示例中,油门控制传感器182简单地监视脚踏板是否相对于不受按压的位置被按压并将其报告给变速器控制电路200。
95.在一个实施方式中,行车制动输入304是设置在车辆系统100的操作者空间中的脚踏板。正如已知的,对脚踏板的按压导致制动控制器188致动行车制动器186以使车辆系统100变慢。在一个示例中,制动控制器188监视脚踏板被按压的百分比量并将其报告给变速器控制电路200。在另一示例中,制动控制器188简单地监视脚踏板是否相对于不受按压的位置被按压并将其报告给变速器控制电路200。
96.在一个实施方式中,发动机制动输入306是设置在车辆系统100的仪表板上的按钮或开关。车辆系统100的操作者可以致动该按钮或开关以请求发动机制动。在一个示例中,除非油门控制输入302大于零,否则将拒绝对于发动机制动的请求。
97.在一个实施方式中,巡航控制输入308是设置在车辆系统100的仪表板上或者车辆系统100的方向盘上的按钮或开关。车辆系统100的操作者可以致动该按钮或开关以在无需恒定地按压油门控制输入302的脚踏板输入的情况下请求原动机控制电路174和变速器控制电路200维持车辆系统100的当前速度。
98.示例性车辆负荷特性包括车辆质量、车辆长度和车辆负荷的其他合适的特性。
99.在一个实施方式中,车辆质量可以由由车辆系统100支撑的用于测量车辆系统100的各部分(例如载货部分)的质量或重量的负荷传感器来确定。在另一实施方式中,如下述文献所公开的那样至少基于发动机扭矩和车辆速度来估计车辆质量:于2007年4月9日提交的标题为method of selecting a transmission shift schedule的美国专利第7,499,784号和于2009年6月1日提交的标题为system for determining avehicle mass
‑
based breakpoint for selecting between two different transmission shift schedules的美国专利第8,332,108号,其全部公开内容通过引用明确地并入本文中。
100.在一个实施方式中,所测量的车辆质量还可以提供车辆长度的指示。例如,变速器控制电路200可以存储针对车辆系统100的期望基线质量。如果确定的车辆质量高于基线,则变速器控制电路200可以推断出已有拖车附接至该车辆系统100。在替选实施方式中,车辆系统100包括检测拖车与车辆系统100的耦合的传感器。拖车的存在或不存在提供车辆系统100的长度的指示。
101.参照图7,多个操作特性420包括道路坡度特性440、车辆相关速度特性442、油门操作者接口输入特性444、发动机负荷特性446和行车制动操作者接口输入特性448。换档准则逻辑400基于所示特性的一个或更多个值来确定是允许所请求的换档变化410还是拒绝所请求的换档变化。
102.图8示出了用于变速器控制电路200的换档准则逻辑400的示例性处理序列500。换
档准则逻辑400确定道路坡度特性440是否达到道路坡度阈值504,如框502所示。在所示的示例中,如果道路坡度特性440大于道路坡度阈值504,则道路坡度特性440达到道路坡度阈值504。在另一示例中,如果道路坡度特性440小于道路坡度阈值504,则道路坡度特性440达到道路坡度阈值504。在所示的实施方式中,如果道路坡度特性440大于道路坡度阈值504,则换档准则逻辑400允许所请求的换档变化,如框412所示。
103.在所示的示例中,如果道路坡度特性440不大于道路坡度阈值504,则换档准则逻辑400确定车辆相关速度特性442是否达到车辆相关速度阈值506,如框508所示。在所示的示例中,如果车辆相关速度特性442大于车辆相关速度阈值506,则车辆相关速度特性442达到车辆相关速度阈值506。在另一示例中,如果车辆相关速度特性442小于车辆相关速度阈值506,则车辆相关速度特性442达到车辆相关速度阈值506。在所示的实施方式中,如果车辆相关速度特性442小于车辆相关速度阈值506,则换档准则逻辑400允许所请求的换档变化,如框412所示。
104.在所示的示例中,如果车辆相关速度特性442确实达到了车辆相关速度阈值506,则换档准则逻辑400确定油门输入特性444是否达到油门阈值520。在所示的示例中,如果油门操作者接口输入特性444大于油门阈值520,则油门操作者接口输入特性444达到油门阈值520。通过将油门阈值520设定为零,针对油门的任何请求都将超过油门阈值520。在另一示例中,如果油门操作者接口输入特性444小于油门阈值520,则油门操作者接口输入特性444达到油门阈值520。在所示的示例中,如果油门操作者接口输入特性444大于油门阈值520,则换档准则逻辑400拒绝所请求的换档变化,如框414所示。
105.在所示的示例中,如果油门操作者接口输入特性444小于油门阈值520,则换档准则逻辑400确定发动机负荷特性446是否达到发动机负荷阈值512,如框514所示。检查发动机负荷以及油门以覆盖巡航控制输入308有效并且因此操作者不按压油门控制输入302的情况。在所示的示例中,如果发动机负荷特性446小于发动机负荷阈值512,则发动机负荷特性446达到发动机负荷阈值512。在另一示例中,如果发动机负荷特性446大于发动机负荷阈值512,则发动机负荷特性446达到发动机负荷阈值512。在所示的示例中,如果发动机负荷特性446大于发动机负荷阈值512,则换档准则逻辑400拒绝所请求的换档变化,如框414所示。
106.在所示的示例中,如果发动机负荷特性446小于发动机负荷阈值512,则换档准则逻辑400确定行车制动输入特性448是否达到行车制动阈值522。在所示的示例中,如果行车制动操作者接口输入特性448大于行车制动阈值522,则行车制动操作者接口输入特性448达到行车制动阈值522。通过将行车制动阈值522设定为零,对行车制动的任何应用将超过行车制动阈值522。在另一示例中,如果行车制动操作者接口输入特性448小于行车制动阈值522,则行车制动操作者接口输入特性448达到行车制动阈值522。在所示的示例中,行车制动阈值522被设定为零并且如果行车制动操作者接口输入特性448大于行车制动阈值522,则换档准则逻辑400允许所请求的换档变化,如框412所示。如果不满足,则换档准则逻辑400拒绝所请求的换档变化,如框414所示。尽管在所示的实施方式中,换档逻辑400基于道路坡度特性440、车辆相关速度特性442、油门操作者接口输入特性444、发动机负荷特性446和行车制动操作者接口输入特性448做出了换档判定,但是在一个实施方式中,不包括道路坡度特性440、车辆相关速度特性442、油门操作者接口输入特性444、发动机负荷特性
446和行车制动操作者接口输入特性448中的一个或更多个。例如,在一个实施方式中,不包括行车制动操作者接口输入特性448,并且如果发动机负荷特性446达到发动机负荷阈值512,则换档逻辑400允许换档变化,如框412所示。
107.在一个实施方式中,道路坡度阈值504、车辆相关速度阈值506、发动机负荷阈值512、油门阈值520和行车制动阈值522是在变速器控制电路200的非暂态计算机可读介质202中存储的值并且这些值不能由用户限定,而在另一实施方式中,道路坡度阈值504、车辆相关速度阈值506、发动机负荷阈值512、油门阈值520和行车制动阈值522是在变速器控制电路200的非暂态计算机可读介质202中存储的可由用户限定的值。除了别的之外,允许阈值可由用户限定的一个优点在于,车队所有者可以通过设定阈值而对该车队操作者执行的手动换档具有更大的控制。
108.在一个示例中,道路坡度阈值504被设定为约
±
3%坡度。大于+3%或小于
‑
3%的值将被变速器控制电路200分类为高于道路坡度阈值,而在
‑
3%与+3%之间的值将被变速器控制电路200分类为低于道路坡度阈值。在另一示例中,道路坡度阈值504被设定为约
±
5%坡度。大于+5%或小于
‑
5%的值将被变速器控制电路200分类为高于道路坡度阈值,而在
‑
5%与+5%之间的值将被变速器控制电路200分类为低于道路坡度阈值。在一个示例中,车辆相关速度阈值506被设定为大约每小时25英里(“25mph”)。等于或低于约25mph的值不会被变速器控制电路200分类为高于车辆相关速度阈值。在一个示例中,变速器控制电路200将小于约15%油门的油门请求分类为不是油门请求。在另一示例中,变速器控制电路200将约为零的油门请求分类为不是油门请求。在一个示例中,发动机负荷阈值512被设定为最大发动机扭矩的约30%。变速器控制电路200不将等于或低于约30%最大发动机扭矩的值分类为高于发动机负荷阈值。
109.参照图7,示出了与变速器控制电路200进行通信的车辆电子编程站(“veps”)460。变速器控制电路200可以从veps 460接收道路坡度阈值504、车辆相关速度阈值506、发动机负荷阈值512、油门阈值520以及行车制动阈值522中的一个或更多个以将其用于处理序列500。以这种方式,车队所有者可以决定通过将行车制动阈值522设定成小于零来从处理序列500中移除行车制动操作者接口输入特性448。因此,框516将总是前进到框412,因为在不应用行车制动的情况下行车制动操作者接口输入特性448的值为零,而如果应用了行车制动则该值大于零。veps460还可以向变速器控制电路200提供附加信息,例如换档规律和其他参数。在下述文献中提供了关于veps 460其他细节:于2013年6月18日提交的标题为system and method for optimizing downshifting of atransmission during vehicle deceleration的美国专利第8,935,068号,其全部公开内容通过引用明确地并入本文中。
110.尽管结合允许或拒绝所请求的手动换档变化描述了处理序列500,但是变速器控制电路200也可以使用该处理序列来决定是允许还是拒绝包括该变速器控制电路200的自动发动机制动请求的发动机制动请求。
111.参照图9,在一个实施方式中,一旦允许操作者请求的换档变化(框412),则处理序列570监视操作者请求的换档是否仍然有效,如框572所示。如果无效,则变速器控制电路200返回至其预设的自动换档规律,如框574所示。如果操作者请求的换档规律仍然有效,则变速器控制电路200确定针对操作参数的换档准则是否仍然满足,如框576所示。如果满足,则操作者请求的换档变化依然有效,如框577所示。如果不满足,则取消操作者请求的换档
变化,如框578所示。
112.参照图10,在一个实施方式中,换档逻辑400使用不同的准则以基于一个或多个操作参数决定是允许换档变化还是拒绝换档变化。例如,可以针对低坡度与陡坡度、下坡坡度与上坡坡度、轻型车辆重量和重型车辆重量以及其他类别提供不同的准则。
113.在所示的实施方式中,换档逻辑400的处理序列580首先确定车辆系统100的道路坡度的类别,如框582所示。在一个示例中,车辆系统100的道路坡度在该道路坡度为零或正(上坡)的情况下被分类为第一类,而在该道路坡度为负(下坡)的情况下被分类为第二类。在另一示例中,车辆系统100的道路坡度在该道路坡度的绝对值等于或超过阈值量(陡坡度)的情况下被分类为第一类,而在该道路坡度的绝对值小于阈值量(低坡度)的情况下被分类为第二类。
114.如果所测量的道路坡度被分类为类别一(例如上坡),则处理序列580确定是否满足针对第一类操作参数的第一换档准则,如框584所示。如果满足,则允许所请求的换档变化,如框412所示。如果不满足,则拒绝所请求的换档变化,如框414所示。如果所测量的道路坡度被分类为类别二(例如下坡),则处理序列580确定是否满足针对第二类操作参数的第二换档准则,如框586所示。如果满足,则允许所请求的换档变化,如框412所示。如果不满足,则拒绝所请求的换档变化,如框414所示。
115.参照图11,示出了用于变速器控制电路200的换档准则逻辑400的另一示例性处理序列550。换档准则逻辑400确定是否满足针对一个或更多个操作特性420的换档准则要求,如框552所示。在一个示例中,针对一个或更多个操作特性420的换档准则要求是处理序列500的要求。在另一示例中,针对一个或更多个操作特性420的换档准则要求可以是对于本文中公开的操作特性420的任何要求。如果满足了针对一个或更多个操作特性420的换档准则要求,则换档准则逻辑400允许所请求的换档变化,如框412所示。如果不满足,则换档准则逻辑400确定是否满足对象避免准则,如框554所示。在一个示例中,对象避免准则是对于车辆系统100的包络(阈值距离)内是否存在对象的确定。如果满足对象避免准则,则换档准则逻辑400允许所请求的换档变化,如框412所示。如果不满足,则换档准则逻辑400拒绝所请求的换档变化,如框414所示。
116.虽然已将本发明描述为具有示例性设计,但是还能够在本公开内容的精神和范围内进一步修改本发明。因此,本技术旨在涵盖使用本发明的一般原理的对本发明的任何变型、利用或改编。此外,本技术旨在涵盖来源于本公开内容的各种变更,它们包含在本发明所涉及的领域的公知常识或惯常操作中并且落入所附权利要求书的范围内。
117.发明构思
118.本发明提供了以下发明构思:
119.1.一种用于管理车辆(100)的变速器的换档变化的系统,所述系统包括:
120.多速自动变速器(104),所述多速自动变速器(104)包括输入构件(108)和可操作地耦合至所述输入构件(108)的输出构件(156),所述多速自动变速器(104)能够被配置于所述输入构件(108)与所述输出构件(156)之间的多个前进速度比率(250);
121.位置确定器(210),所述位置确定器(210)提供所述车辆(100)的当前位置的指示;以及
122.控制电路(200),所述控制电路(200)可操作地耦合至所述多速自动变速器(104)
和所述位置确定器(210),所述控制电路(200)将所述多速自动变速器(104)配置成建立所述多个前进速度比率(250)中的每一个,所述控制电路(200)基于所述车辆(100)的当前位置的指示来将所述多速自动变速器(104)从第一前进速度比率换档至第二前进速度比率。
123.2.根据发明构思1所述的系统,还包括所述车辆的操作者接口(300)的变速器换档选择器(310),所述控制电路(200)基于所述车辆的当前位置的指示和来自所述变速器换档选择器(310)的将所述多速自动变速器(104)换档至所述第二前进速度比率的请求二者来将所述多速自动变速器(104)从所述第一前进速度比率换档至所述第二前进速度比率。
124.3.根据发明构思1所述的系统,还包括:
125.操作者接口(300),所述操作者接口(300)可操作地耦合至所述控制电路(200)并且包括具有至少一个操作者可选择换档请求输入(344,346,368)的变速器换档选择器(310);以及
126.多个操作特性监视器,所述多个操作特性监视器监视与所述车辆相关的多个操作特性(420),其中,所述控制电路(200)响应于从所述操作者接口(300)接收到建立所述多个前进速度比率中的所述第二前进速度比率的请求,如果所述多个操作特性(420)满足换档准则逻辑(400),则所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而如果所述多个操作特性(420)不满足所述换档准则逻辑(400),则所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率,所述位置确定器(210)是所述多个操作特性监视器中的一个。
127.4.根据发明构思3所述的系统,其中,所述多个操作特性监视器中的第一操作特性监视器提供所述车辆的移动特性的指示,当所述移动特性具有第一值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当所述移动特性具有第二值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
128.5.根据发明构思4所述的系统,其中,所述移动特性是车辆相关速度特性(442),并且所述第一值低于车辆相关速度阈值(506),并且所述第二值高于所述车辆相关速度阈值(506)。
129.6.根据发明构思4和5中的任一项所述的系统,其中,所述第一操作特性监视器是车辆速度传感器(142,146,170)。
130.7.根据发明构思4所述的系统,其中,所述移动特性是道路坡度特性(440),并且所述第一值低于道路坡度阈值(504),并且所述第二值高于所述道路坡度阈值(504)。
131.8.根据发明构思7所述的系统,其中,所述道路坡度由由所述车辆支撑的车辆倾斜度传感器(204)来确定。
132.9.根据发明构思7所述的系统,其中,所述道路坡度通过将所述车辆的当前位置的指示与已知道路坡度的映射图关联来确定。
133.10.根据发明构思4所述的系统,其中,所述移动特性是发动机负荷特性(446),并且所述第一值低于发动机负荷阈值(512),并且所述第二值高于所述发动机负荷阈值(512)。
134.11.根据发明构思3至10中的任一项所述的系统,其中,所述多个操作特性监视器中的第二操作特性监视器提供所述车辆的操作者接口(300)输入特性的指示,当所述操作
者接口(300)输入特性具有第一值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当所述操作者接口(300)输入特性具有第二值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
135.12.根据发明构思11所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的油门控制输入(302)的油门操作者接口输入特性(444)。
136.13.根据发明构思11所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的行车制动输入(304)的行车制动操作者接口输入特性(448)。
137.14.根据发明构思11所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的发动机制动输入(306)的发动机(102)制动操作者接口(300)输入特性。
138.15.根据发明构思11所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的巡航控制输入(308)的巡航控制操作者接口(300)输入特性。
139.16.根据发明构思3至15中的任一项所述的系统,其中,所述多个操作特性监视器中的第三操作特性监视器提供所述车辆的车辆负荷特性的指示,当所述车辆负荷特性具有第一值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当所述车辆负荷特性具有第二值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
140.17.根据发明构思3至16中的任一项所述的系统,所述系统还包括对象检测器(220),其中,在所述多个操作特性(420)不满足所述换档准则逻辑(400)的情况下,如果所述对象检测器(220)在所述车辆的包络内检测到对象,则所述控制电路(200)仍然将建立所述第二前进速度比率。
141.18.根据发明构思3所述的系统,其中,所述多个操作特性监视器提供道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示、油门控制操作者接口(300)输入特性的指示以及行车制动操作者接口输入特性(448)的指示,当道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示、油门控制操作者接口(300)输入特性的指示以及行车制动操作者接口输入特性(448)的指示具有满足所述换档准则逻辑(400)的第一组值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示、油门控制输入(302)状态特性的指示以及行车制动输入(304)状态特性的指示具有不满足所述换档准则逻辑(400)的第二组值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
142.19.根据发明构思3所述的系统,其中,所述多个操作特性监视器提供道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示以及油门控制操作者接口(300)输入特性的指示,所述换档准则逻辑(400)确定所述道路坡度特性(440)的指示是否高于道路坡度阈值(504),如果是,则所述换档准则逻辑(400)得以满足。
143.20.根据发明构思19所述的系统,其中,如果所述道路坡度特性(440)的指示低于所述道路坡度阈值(504),则所述换档准则逻辑(400)确定所述车辆相关速度特性(442)的指示是否低于车辆相关速度阈值(506),如果是,则所述换档准则逻辑(400)得以满足。
144.21.根据发明构思20所述的系统,其中,如果所述车辆相关速度特性(442)的指示
高于所述车辆相关速度阈值(506),则所述换档准则逻辑(400)确定所述油门控制操作者接口(300)输入特性的指示是否高于油门阈值(520),如果是,则所述换档准则逻辑(400)不满足。
145.22.根据发明构思21所述的系统,其中,如果所述油门控制操作者接口(300)输入特性低于所述油门阈值(520),则所述换档准则逻辑(400)确定所述发动机负荷特性(446)的指示是否高于发动机负荷阈值(512),如果是,则所述换档准则逻辑(400)不满足。
146.23.根据发明构思21所述的系统,其中,所述多个操作特性(420)中的第一操作特性被监视,并且如果所述第一操作特性具有第一值,则所述控制电路(200)使用所述换档准则逻辑(400)来确定是要维持所述多个前进速度比率中的所述第一前进速度比率还是将所述多速自动变速器(104)配置于所述多个前进速度比率中的所述第二前进速度比率,而如果所述第一操作特性具有第二值,则所述控制电路(200)使用替选的换档准则逻辑(400)来确定是要维持所述多个前进速度比率中的所述第一前进速度比率还是将所述多速自动变速器(104)配置于所述多个前进速度比率中的所述第二前进速度比率。
147.24.根据前述发明构思中的任一项所述的系统,其中,所述位置确定器(210)是gps接收器。
148.25.一种用于管理车辆(100)的多速自动变速器(104)的换档变化的方法,所述方法包括下述步骤:
149.接收来自位于所述车辆的操作者空间中的操作者接口(300)的变速器换档选择器(310)的、将所述多速自动变速器(104)从第一前进速度比率换档至第二前进速度比率的请求;
150.监视所述车辆(100)的当前位置;以及
151.响应于接收到所述请求,部分地基于所述车辆(100)的当前位置来确定是否要将所述多速自动变速器(104)换档至所述第二前进速度比率。
152.26.根据发明构思25所述的方法,还包括下述步骤:基于所述车辆(100)的当前位置来确定道路坡度特性(440)。
153.27.一种用于管理车辆(100)的变速器的换档变化的系统,所述系统包括:
154.多速自动变速器(104),所述多速自动变速器(104)包括输入构件(108)和可操作地耦合至所述输入构件(108)的输出构件(156),所述多速自动变速器(104)能够被配置于所述输入构件(108)与所述输出构件(156)之间的多个前进速度比率(250);
155.控制电路(200),所述控制电路(200)可操作地耦合至所述多速自动变速器(104),所述控制电路(200)将所述多速自动变速器(104)配置成建立所述多个前进速度比率(250)中的每一个;
156.操作者接口(300),所述操作者接口(300)可操作地耦合至所述控制电路(200)并且包括具有至少一个操作者可选择换档请求输入的变速器换档选择器(310);以及
157.多个操作特性监视器,所述多个操作特性监视器监视与所述车辆相关的多个操作特性(420),其中,所述控制电路(200)将所述多速自动变速器(104)配置于所述多个前进速度比率中的第一前进速度比率,以及响应于从所述操作者接口(300)接收到建立所述多个前进速度比率中的第二前进速度比率的请求,如果所述多个操作特性(420)满足换档准则逻辑(400),则所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度
比率,而如果所述多个操作特性(420)不满足所述换档准则逻辑(400),则所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
158.28.根据发明构思27所述的系统,其中,所述多个操作特性监视器中的第一操作特性监视器提供所述车辆的移动特性的指示,当所述移动特性具有第一值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当所述移动特性具有第二值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
159.29.根据发明构思28所述的系统,其中,所述移动特性是车辆相关速度特性(442),并且所述第一值低于车辆相关速度阈值(506),并且所述第二值高于所述车辆相关速度阈值(506)。
160.30.根据发明构思29所述的系统,其中,所述第一操作特性监视器是车辆速度传感器(142,146,170)。
161.31.根据发明构思28所述的系统,其中,所述移动特性是道路坡度特性(440),并且所述第一值低于道路坡度阈值(504),并且所述第二值高于所述道路坡度阈值(504)。
162.32.根据发明构思30所述的系统,其中,所述道路坡度由由所述车辆支撑的车辆倾斜度传感器来确定。
163.33.根据发明构思30所述的系统,其中,所述道路坡度通过将所述车辆的当前位置与已知道路坡度的映射图关联来确定。
164.34.根据发明构思33所述的系统,其中,所述车辆包括提供所述车辆的当前位置的指示的gps接收器。
165.35.根据发明构思28所述的系统,其中,所述移动特性是发动机负荷特性(446),并且所述第一值低于发动机负荷阈值(512),并且所述第二值高于所述发动机负荷阈值(512)。
166.36.根据发明构思27所述的系统,其中,所述多个操作特性监视器中的第二操作特性监视器提供所述车辆的操作者接口(300)输入特性的指示,当所述操作者接口(300)输入特性具有第一值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当所述操作者接口(300)输入特性具有第二值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
167.37.根据发明构思36所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的油门控制输入(302)的油门操作者接口输入特性(444)。
168.38.根据发明构思36所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的行车制动输入(304)的行车制动操作者接口输入特性(448)。
169.39.根据发明构思36所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的发动机制动输入(306)的发动机(102)制动操作者接口(300)输入特性。
170.40.根据发明构思36所述的系统,其中,所述操作者接口(300)输入特性是基于所述操作者接口(300)的巡航控制输入(308)的巡航控制操作者接口(300)输入特性。
171.41.根据发明构思27所述的系统,其中,所述多个操作特性监视器中的第三操作特性监视器提供所述车辆的车辆负荷特性的指示,当所述车辆负荷特性具有第一值时,所述
控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当所述车辆负荷特性具有第二值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
172.42.根据发明构思27所述的系统,所述系统还包括对象检测器(220),其中,在所述多个操作特性(420)不满足所述换档准则逻辑(400)的情况下,如果所述对象检测器(220)在所述车辆的包络内检测到对象,则所述控制电路(200)仍然将建立所述第二前进速度比率。
173.43.根据发明构思27所述的系统,其中,所述多个操作特性监视器提供道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示、油门控制操作者接口(300)输入特性的指示以及行车制动操作者接口输入特性(448)的指示,当道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示、油门控制操作者接口(300)输入特性的指示以及行车制动操作者接口输入特性(448)的指示具有满足所述换档准则逻辑(400)的第一组值时,所述控制电路(200)将所述多速自动变速器(104)配置于所述第二前进速度比率,而当道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示、油门控制输入(302)状态特性的指示以及行车制动输入(304)状态特性的指示具有不满足所述换档准则逻辑(400)的第二组值时,所述控制电路(200)将所述多速自动变速器(104)维持于所述第一前进速度比率。
174.44.根据发明构思27所述的系统,其中,所述多个操作特性监视器提供道路坡度特性(440)的指示、车辆相关速度特性(442)的指示、发动机负荷特性(446)的指示以及油门控制操作者接口(300)输入特性的指示,所述换档准则逻辑(400)确定所述道路坡度特性(440)的指示是否高于道路坡度阈值(504),如果是,则所述换档准则逻辑(400)得以满足。
175.45.根据发明构思44所述的系统,其中,如果所述道路坡度特性(440)的指示低于所述道路坡度阈值(504),则所述换档准则逻辑(400)确定所述车辆相关速度特性(442)的指示是否低于车辆相关速度阈值(506),如果是,则所述换档准则逻辑(400)得以满足。
176.46.根据发明构思45所述的系统,其中,如果所述车辆相关速度特性(442)的指示高于所述车辆相关速度阈值(506),则所述换档准则逻辑(400)确定所述油门控制操作者接口(300)输入特性的指示是否高于油门阈值(520),如果是,则所述换档准则逻辑(400)不满足。
177.47.根据发明构思46所述的系统,其中,如果所述油门控制操作者接口(300)输入特性低于所述油门阈值(520),则所述换档准则逻辑(400)确定所述发动机负荷特性(446)的指示是否高于发动机负荷阈值(512),如果是,则所述换档准则逻辑(400)不满足。
178.48.根据发明构思46所述的系统,其中,所述多个操作特性(420)中的第一操作特性被监视,并且如果所述第一操作特性具有第一值,则所述控制电路(200)使用所述换档准则逻辑(400)来确定是要维持所述多个前进速度比率中的所述第一前进速度比率还是将所述多速自动变速器(104)配置于所述多个前进速度比率中的所述第二前进速度比率,而如果所述第一操作特性具有第二值,则所述控制电路(200)使用替选的换档准则逻辑(400)来确定是要维持所述多个前进速度比率中的所述第一前进速度比率还是将所述多速自动变速器(104)配置于所述多个前进速度比率中的所述第二前进速度比率。
179.49.一种用于管理车辆的多速自动变速器(104)的换档变化的方法,所述方法包括
下述步骤:
180.接收来自位于所述车辆的操作者空间中的操作者接口(300)的多速变速器换档选择器(310)的、将所述多速自动变速器(104)从第一前进速度比率换档至第二前进速度比率的请求;
181.监视所述车辆的多个操作特性(420);以及
182.响应于接收到所述请求,当所述多个操作特性(420)满足换档准则逻辑(400)时将所述多速自动变速器(104)换档至所述第二前进速度比率,而当所述多个操作特性(420)不满足所述换档准则逻辑(400)时维持于所述第一前进速度比率。
183.50.根据发明构思49所述的方法,还包括下述步骤:接收所述车辆的当前位置,其中,所述多个操作特性(420)中的至少一个基于所述车辆的当前位置。
184.51.根据发明构思49所述的方法,还包括下述步骤:
185.在所述车辆附近的包络中监视对象;以及
186.检测所述车辆附近的对象,其中,响应于检测到所述车辆附近的对象,所述换档准则逻辑(400)得以满足。
187.52.根据发明构思49所述的方法,其中,监视所述车辆的多个操作特性(420)的步骤包括下述步骤:
188.监视道路坡度特性(440)的指示;
189.监视车辆相关速度特性(442)的指示;
190.监视发动机负荷特性(446)的指示;以及
191.监视油门控制输入(302)的油门控制操作者接口(300)输入特性的指示。
192.53.根据发明构思52所述的方法,还包括下述步骤:
193.确定所述道路坡度特性(440)的指示是否高于道路坡度阈值(504),如果是,则所述换档准则逻辑(400)得以满足;
194.如果所述道路坡度特性(440)的指示低于所述道路坡度阈值(504),则确定所述车辆相关速度特性(442)的指示是否低于车辆相关速度阈值(506),如果是,则所述换档准则逻辑(400)得以满足;
195.如果所述车辆相关速度特性(442)的指示高于所述车辆相关速度阈值(506),则基于所述油门控制操作者接口(300)输入特性的指示来确定操作者是否致动了所述油门控制输入(302),如果是,则所述换档准则逻辑(400)不满足;
196.如果所述油门控制操作者接口(300)输入特性指示所述操作者未致动所述车辆的所述油门控制输入(302),则确定所述发动机负荷特性(446)的指示是否高于发动机负荷阈值(512),如果是,则所述换档准则逻辑(400)不满足;而如果所述发动机负荷特性(446)低于所述发动机负荷阈值(512),则所述换档准则逻辑(400)得以满足。
197.54.一种用于管理车辆(100)的变速器的换档变化的系统,所述系统包括:
198.多速自动变速器(104),所述多速自动变速器(104)包括输入构件(108)和可操作地耦合至所述输入构件(108)的输出构件(156),所述多速自动变速器(104)能够被配置于所述输入构件(108)与所述输出构件(156)之间的多个前进速度比率(250);
199.控制电路(200),所述控制电路(200)可操作地耦合至所述变速器,所述控制电路(200)将所述多速自动变速器(104)配置成建立所述多个前进速度比率中的每一个;
200.操作者接口(300),所述操作者接口(300)可操作地耦合至所述控制电路(200)并且包括具有至少一个操作者可选择换档请求输入的变速器换档选择器(310);以及
201.对象检测器(220),所述对象检测器(220)监视所述车辆附近的包络中对象的存在,其中,所述控制电路(200)将所述多速自动变速器(104)配置成建立所述多个前进速度比率中的第一前进速度比率,并且响应于从所述操作者接口(300)接收到建立所述多个前进速度比率中的第二前进速度比率的请求,如果所述对象检测器(220)在所述车辆附近的包络内检测到对象,则所述控制电路(200)将所述多速自动变速器(104)配置成建立所述第二前进速度比率。
202.55.一种用于管理车辆(100)的多速自动变速器(104)的换档变化的方法,所述方法包括下述步骤:
203.接收来自位于所述车辆的操作者空间中的操作者接口(300)的变速器换档选择器(310)的、将所述多速自动变速器(104)从第一前进速度比率换档至第二前进速度比率的请求;
204.在所述车辆附近的包络中监视对象;以及
205.响应于接收到所述请求,部分地基于所述对象是否在所述车辆附近的包络内来确定是否要将所述多速自动变速器(104)换档至所述第二前进速度比率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1