管道清淤机器人
1.本实用新型涉及特种机器人领域,具体涉及一种用于的管道疏通用的管道清淤机器人。
背景技术:
2.随着城市化进程的加快,排水管线大量应用于城市建设,排水管道的畅通状况会影响城市的正常运行,一旦排水管道堵塞,极易造成城市内涝,定期疏通和管道检测是防止堵塞的有效措施,目前人工清理是传统的清淤方式,但主要用于大口径管道,对于小口径管道,由于其工作空间狭窄,人员无法进入,对清淤造成困难。
技术实现要素:
3.有鉴于此,本实用新型的目的是研制出一种适用于小型管道并可适应不同管道管径的清淤机器人,从而解决小口径管道阻塞后难以疏通的问题。
4.本实用新型的管道清淤机器人,包括机身、自适应伸缩机构、清淤机构和传动机构;
5.所述自适应伸缩机构包括丝杆驱动电机、前端支撑板、后端支撑板、丝杆、螺母滑块、推杆和连接架;所述前端支撑板和后端支撑板均固定于机身并铰接有等长的轮腿,且轮腿外端安装有行走轮;所述连接架铰接于相对应的轮腿之间,使前端支撑板、后端支撑板、轮腿和连接架共同构成平行四边形连杆机构;所述丝杆转动支承于前端支撑板和后端支撑板之间,所述螺母滑块配合于丝杆,所述推杆铰接于螺母滑块与轮腿之间;
6.所述传动机构包括行走驱动电机、一级传动带和二级传动带;所述行走驱动电机固定于机身,其输出轴固定安装有主动带轮,所述前端支撑板安装有与轮腿铰轴同轴设置的双联带轮,所述行走轮的转轴端部固定安装有从动带轮;所述一级传动带连接于所述主动带轮和双联带轮之间,所述二级传动带连接于所述双联带轮和从动带轮之间;
7.所述清淤机构包括设置于机身前端的清淤刀组件和用于驱动所述清淤刀组件转动的清淤电机;
8.进一步,所述轮腿上设有管壁清淤构件;所述管壁清淤构件设有用于容纳行走轮的轮腔,所述轮腔前部形成有用于清理行走轮前方淤泥的弧形刀片和用于挡住垃圾进入轮腔内的挡片;
9.进一步,所述清淤刀组件包括固定安装于清淤电机输出轴上的刀盘、沿周向均布于刀盘的多个扇叶型刀片和设置于刀盘前端的疏通钻头。
10.进一步,所述机身包括三根相互平行的连接杆;所述前端支撑板、后端支撑板和螺母滑块均为正三角形结构;所述前端支撑板和后端支撑板设有三个用于与连接杆固定的安装孔,所述螺母滑块设有三个与连接杆滑动配合的通孔。
11.本实用新型的有益效果:本实用新型采用摇杆滑块机构的伸缩原理设计出一种自适应管径大小的管道清淤机器人,此机器人由贴合管径的轮腿、清淤刀具、带传动机构以及
自适应伸缩机构组成,伸缩机构采用摇杆滑块机构实现在不同管径的自适应伸缩变化,行走机构采用平行四边形机构,两个机构灵活配合实现管径的自适应变化。
附图说明
12.下面结合附图和实施例对本实用新型作进一步描述:
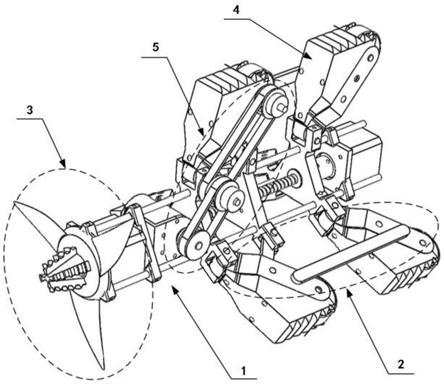
13.图1为本实用新型的管道清淤机器人的整体结构示意图;
14.图2为本实用新型的自适应伸缩机构的结构示意图;
15.图3为本实用新型的清淤刀组件的结构示意图;
16.图4为本实用新型的传动机构的结构示意图;
17.图5为本实用新型的管壁清淤构件的结构示意图。
具体实施方式
18.如图1所示,本实施例的一种管道清淤机器人,包括机身1、自适应伸缩机构2、清淤机构3、传动机构4;
19.如图2所示,所述自适应伸缩机构2包括丝杆驱动电机、前端支撑板2-3、后端支撑板2-6、丝杆2-7、螺母滑块2-5、推杆2-4和连接架2-2;所述机身1包括三根相互平行的连接杆;丝杆驱动电机的机体端面设有三个连接耳,通过三个连接耳固定于三个连接杆的后端;所述前端支撑板2-3和后端支撑板2-6为正三角形结构,其设有三个周向均布的固定孔,机身1的三根连接杆穿过前端支撑板2-3和后端支撑板2-6的固定孔实现二者的相互固定;前端支撑板2-3和后端支撑板2-6均铰接有三个等长的轮腿2-1,且轮腿2-1外端安装有行走轮;三个轮腿2-1安装于正三角形前端支撑板2-3和后端支撑板2-6的三个顶点处;所述连接架2-2铰接于相对应的轮腿2-1之间,使前端支撑板2-3、后端支撑板2-6、轮腿2-1和连接架2-2共同构成三组平行四边形连杆机构;前端支撑板2-3和后端支撑板2-6的中点位置设有安装孔,所述丝杆2-7通过该安装孔转动支承于前端支撑板2-3和后端支撑板2-6之间,所述螺母滑块2-5配合于丝杆2-7,所述推杆2-4铰接于螺母滑块2-5与轮腿2-1之间;因此,当丝杆驱动电机驱动丝杆2-7转动时,螺母滑块2-5将沿丝杆2-7轴向移动,通过推杆2-4推动轮腿2-1摆动使六个轮腿2-1同步向外张开或向内回收,使行走轮能够可靠的压紧管壁,实现机器人在不同管径管道内行进。
20.如图1、图4所示,所述传动机构4包括行走驱动电机、一级传动带和二级传动带;所述行走驱动电机固定于机身1,其输出轴固定安装有主动带轮4-2,所述前端支撑板4-1安装有与轮腿铰轴同轴设置的双联带轮4-3,所述行走轮的转轴端部固定安装有从动带轮4-4;所述一级传动带连接于所述主动带轮4-2和双联带轮4-3之间,所述二级传动带连接于所述双联带轮4-3和从动带轮4-4之间;当本机器人需要在管道内行进时,利用自适应伸缩机构2张开将行走轮贴紧管道内壁,行走驱动电机通过两级带传动机构4驱动行走轮转动实现行进。
21.如图5所示,所述轮腿2-1上设有管壁清淤构件5;所述管壁清淤构件5设有用于容纳行走轮的轮腔,所述轮腔前部形成有用于清理行走轮前方淤泥的弧形刀片5-1和用于挡住垃圾进入轮腔内的挡片5-2;机器人在管内行进时,通过弧形刀片5-1刮除附着在管壁上的淤泥,确保行走轮能够可靠的与管壁接触。
22.如图1和3所示,所述清淤机构3包括设置于机身1前端的清淤刀组件和用于驱动所述清淤刀组件转动的清淤电机;所述清淤刀组件包括固定安装于清淤电机输出轴上的刀盘、沿周向均布于刀盘的多个扇叶型刀片3-2和设置于刀盘前端的疏通钻头3-1;通过扇叶型刀片3-2旋转可扫除管道前方障碍,而前端的疏通钻头3-1可强力疏通管道堵塞物。
23.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
技术特征:
1.一种管道清淤机器人,其特征在于:包括机身、自适应伸缩机构、清淤机构和传动机构;所述自适应伸缩机构包括丝杆驱动电机、前端支撑板、后端支撑板、丝杆、螺母滑块、推杆和连接架;所述前端支撑板和后端支撑板均固定于机身并铰接有等长的轮腿,且轮腿外端安装有行走轮;所述连接架铰接于相对应的轮腿之间,使前端支撑板、后端支撑板、轮腿和连接架共同构成平行四边形连杆机构;所述丝杆转动支承于前端支撑板和后端支撑板之间,所述螺母滑块配合于丝杆,所述推杆铰接于螺母滑块与轮腿之间;所述传动机构包括行走驱动电机、一级传动带和二级传动带;所述行走驱动电机固定于机身,其输出轴固定安装有主动带轮,所述前端支撑板安装有与轮腿铰轴同轴设置的双联带轮,所述行走轮的转轴端部固定安装有从动带轮;所述一级传动带连接于所述主动带轮和双联带轮之间,所述二级传动带连接于所述双联带轮和从动带轮之间;所述清淤机构包括设置于机身前端的清淤刀组件和用于驱动所述清淤刀组件转动的清淤电机。2.根据权利要求1所述的管道清淤机器人,其特征在于:所述轮腿上设有管壁清淤构件;所述管壁清淤构件设有用于容纳行走轮的轮腔,所述轮腔前部形成有用于清理行走轮前方淤泥的弧形刀片和用于挡住垃圾进入轮腔内的挡片。3.根据权利要求2所述的管道清淤机器人,其特征在于:所述清淤刀组件包括固定安装于清淤电机输出轴上的刀盘、沿周向均布于刀盘的多个扇叶型刀片和设置于刀盘前端的疏通钻头。4.根据权利要求3所述的管道清淤机器人,其特征在于:所述机身包括三根相互平行的连接杆;所述前端支撑板、后端支撑板和螺母滑块均为正三角形结构;所述前端支撑板和后端支撑板设有三个用于与连接杆固定的安装孔,所述螺母滑块设有三个与连接杆滑动配合的通孔。
技术总结
本实用新型公开了一种管道清淤机器人,包括机身、自适应伸缩机构、清淤机构和传动机构;所述自适应伸缩机构包括丝杆驱动电机、前端支撑板、后端支撑板、丝杆、螺母滑块、推杆和连接架;所述传动机构包括行走驱动电机、一级传动带和二级传动带;所述清淤机构包括设置于机身前端的清淤刀组件和用于驱动所述清淤刀组件转动的清淤电机。本实用新型利用自适应伸缩机构实现在不同管径的自适应伸缩变化,从而可适应不同管道管径,解决小口径管道阻塞后难以疏通的问题。通的问题。通的问题。
技术研发人员:龙樟 龙泉宇 唐博 谭忠贤 彭睿豪 张洋瑞 王韵雅 王苗 杨安俊
受保护的技术使用者:西南石油大学
技术研发日:2021.07.16
技术公布日:2022/5/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1