一种模块化行星减速驱动单元及应用该模块化的机器人的制作方法
1.本实用新型涉及机械传动及机器人技术领域,具体是指一种模块化行星减速驱动单元及应用该模块化的机器人。
背景技术:
2.常用的减速驱动方案主要有普通多级齿轮减速方案、蜗轮蜗杆减速方案、行星减速方案等、谐波减速方案等;行星减速驱动是极为常用的一种模块化行星减速驱动单元减速驱动机构,具有应用范围广、结构简单、减速比大等特点。
3.常见的行星减速器为定比行星减速驱动方案,这种方案设计的行星减速器速比单一,备货零件数量多,生产成本高。
技术实现要素:
4.为解决现有技术中的不足,本实用新型提供一种模块化行星减速驱动单元及应用该模块化的机器人,多个级联的行星减速模块可以灵活组装,结构简单。
5.本实用新型为实现上述目的,通过以下技术方案实现:一种模块化行星减速驱动单元,包括至少一组行星减速模块,行星减速模块包括壳体以及设置在壳体内的行星减速机构,相邻两个行星减速机构通过一组行星减速机构的行星轮与另一组行星减速机构的太阳轮相啮合。
6.作为优选,壳体为圆环形壳体,壳体内壁一侧沿周向开设有多个齿圈槽,行星减速机构的固定齿圈的外圈固设有多个与齿圈槽相适配的凸台,固定齿圈的凸台设置在齿圈槽内。
7.齿圈槽和凸台的个数根据实际情况进行选取,齿圈槽与凸台相适配,固定齿圈的凸台安装在齿圈槽内,用于固定齿圈的周向固定。
8.作为优选,凸台和壳体上分别设置有相对应的销孔,销孔内穿设有销轴。
9.凸台和壳体上分别设置有相对应的销孔,销孔内穿设有销轴,行星减速机构的固定齿圈既能通过安装在齿圈槽内进行周向固定,又能通过销轴连接在两个行星减速机构的壳体之间。
10.作为优选,壳体包括第一壳体,第一壳体外侧沿周向设置有多个第一凹槽,相邻两个第一凹槽之间的凸起为连接凸块,连接凸块下方设置有销孔和沿径向方向贯穿的螺纹孔,销孔开设在齿圈槽内。
11.第一种壳体的外侧等间距设置有多个第一凹槽,相邻两个第一凹槽之间形成的连接凸块开设有销孔,用于连接相邻两个行星减速机构的固定齿圈,连接凸块开设有螺纹孔,螺纹孔内穿设有用于固定连接相邻两个行星减速模块壳体的螺栓;销孔开设在齿圈槽内,与凸块上开设的销孔相对应,用于穿设销轴,将固定齿圈连接在壳体和相邻行星减速模块的壳体上。
12.作为优选,壳体包括第二壳体,第二壳体的外缘两侧沿周向分别设置有多个第二
凹槽和第三凹槽,相邻第二凹槽和第三凹槽交错分布。
13.第二壳体的外缘两侧等间距分别设置有多个第二凹槽和第三凹槽,作为两侧端行星减速模块的壳体。
14.作为优选,第二凹槽设置在靠近齿圈槽的一侧,两个相邻第三凹槽之间设置有贯穿的螺纹孔,相邻壳体通过穿设在螺纹孔内的螺栓连接。
15.第二凹槽和第三凹槽开设螺纹孔,便于本实用新型壳体之间的组装和拆卸。
16.作为优选,行星减速机构包括行星架、固设在行星架一侧的太阳轮以及多个设置在行星架上的行星轮,行星轮与固定齿圈内啮合,行星轮与相邻行星减速机构的太阳轮外啮合。
17.作为优选,还包括输入端和输出端,一侧行星减速机构连接有输入轴,另一侧行星减速机构的行星架连接有输出轴支架。
18.一种应用模块化行星减速驱动单元的机器人,包括机器人本体以及模块化行星减速驱动单元,模块化行星减速驱动单元与机器人本体的活动关节通过连接件连接,模块化行星减速驱动单元能用于带动机器人本体的活动关节转动,用于提高对机器人活动关节处较好的控制。
19.对比现有技术,本实用新型的有益效果在于:多个行星减速模块可以根据使用者需要的行星减速器速比进行组装,灵活确定行星减速器速比,克服了现有技术行星减速器速比单一,备货零件数量多,生产成本高的问题;壳体设置有第一凹槽或设置第二凹槽、第三凹槽,两种壳体之间配合固定连接,便于相邻行星减速模块的壳体进行连接,同时便于组装和拆卸。
附图说明
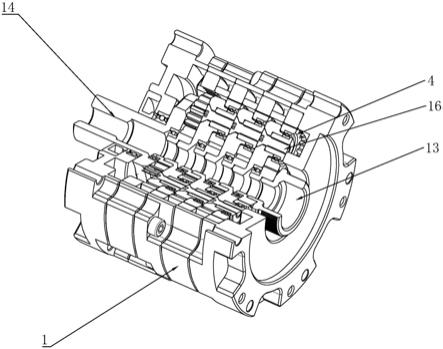
20.附图1为本实用新型立体结构示意图;
21.附图2为本实用新型立体结构剖视示意图;
22.附图3为本实用新型行星减速机构结构示意图;
23.附图4为本实用新型第一壳体立体结构示意图;
24.附图5为本实用新型固定齿圈立体结构示意图;
25.附图6为本实用新型行星减速模块连接原理图。
26.附图中所示标号:1、第一壳体;101、齿圈槽;2、太阳轮;3、行星架;4、行星轮;5、固定齿圈;501、凸台;6、第一凹槽;7、第二凹槽;8、第三凹槽;9、销孔;10、第二壳体;11、螺纹孔;12、螺栓;13、输入轴;14、输出轴支架;15、连接凸块;16、销轴。
具体实施方式
27.下面结合具体实施例,进一步阐述本实用新型,如图1~6所示,一种模块化行星减速驱动单元,包括多组级联的行星减速模块,还包括输入端和输出端。
28.行星减速模块包括壳体以及设置在壳体内的行星减速机构,相邻两个行星减速机构通过一组行星减速机构的行星轮4与另一组行星减速机构的太阳轮2相啮合,根据需要的行星减速器速比进行组装不同组数的行星减速模块。一侧行星减速机构连接有输入轴13,另一侧行星减速机构的行星架3连接有输出轴支架14。
29.壳体为圆环形壳体,壳体内壁一侧沿周向开设有多个齿圈槽101,本实施例开设有六个齿圈槽101,齿圈槽101的个数根据实际情况开设,固定齿圈5的外圈固设有六个与齿圈槽101相适配的凸台501,行星减速机构的固定齿圈5的凸台501设置在齿圈槽101内。凸台501和壳体上分别设置有相对应的销孔9,销孔9内穿设有销轴10。凸台501和壳体上分别设置有相对应的销孔9,销孔9内穿设有销轴10,行星减速机构的固定齿圈5既能通过安装在齿圈槽101内进行周向固定,又能通过销轴10连接在两个行星减速机构的壳体之间。
30.行星减速机构包括行星架3、固设在行星架3一侧的太阳轮2以及多个设置在行星架3上的行星轮4,行星轮4与固定齿圈5内啮合,行星轮4与相邻行星减速机构的太阳轮2外啮合,
31.壳体分为两种,第一壳体1和第二壳体10,第一壳体1外侧沿周向设置有多个第一凹槽6,相邻两个第一凹槽6之间的凸起为连接凸块15,连接凸块15下方设置有销孔9和沿径向方向贯穿的螺纹孔11,销孔9开设在齿圈槽101内。第一种壳体的外侧等间距设置有多个第一凹槽6,相邻两个第一凹槽6之间形成的连接凸块15开设有销孔9,用于连接相邻两个行星减速机构的固定齿圈5,连接凸块15开设有螺纹孔11,螺纹孔11内穿设有用于固定连接相邻两个行星减速模块壳体的螺栓12;销孔9开设在齿圈槽101内,与凸块上开设的销孔9相对应,用于穿设销轴10,将固定齿圈5连接在壳体和相邻行星减速模块的壳体上。
32.第二壳体10的外缘两侧沿周向分别设置有多个第二凹槽7和第三凹槽8,相邻第二凹槽7和第三凹槽8交错分布,第二凹槽7设置在靠近齿圈槽101的一侧,两个相邻第三凹槽8之间设置有贯穿的螺纹孔11,相邻壳体通过穿设在螺纹孔11内的螺栓12连接。
33.第二壳体10的外缘两侧等间距分别设置有多个第二凹槽7和第三凹槽8,第二凹槽7和第三凹槽8开设螺纹孔11,便于本实用新型壳体之间的组装和拆卸。
34.第一壳体1作为本实用新型的内侧行星减速模块的壳体,第二壳体10作为两侧端行星减速模块的壳体,第二壳体10也可组装在两个第一壳体1之间,用于安装行星减速机构,通过增加减少内侧行星减速模块实现行星减速模块之间的速比调节。
35.传动时,输入轴13与外置传动系统连接,首先传入与输入轴13相邻的行星减速机构的太阳轮2,带动行星减速机构的行星轮4转动,由一级行星减速机构的行星架3依次带动下一级行星减速机构的太阳轮2转动,最后,与输出轴支架14相邻连接的行星减速机构的行星架3带动输出轴支架14转动,依次传动,最终由输出轴支架14输出,整个行星减速器输出转矩为t
×
i总合,输出转速为n/i总合;其中,t为输入机构转矩,n为输入机构转速,i总合为各级行星减速模块速比乘积总合。
36.还提供一种应用模块化行星减速驱动单元的机器人,包括机器人本体以及模块化行星减速驱动单元,模块化行星减速驱动单元与机器人本体的活动关节通过连接件连接,模块化行星减速驱动单元能用于带动机器人本体的活动关节转动,用于提高对机器人活动关节处较好的控制。
37.应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1