一种步进电机驱动的二自由度球形视频监控终端装置的制作方法
1.本实用新型涉及安防监控设备的技术领域,特别涉及一种步进电机驱动的二自由度球形视频监控终端装置。
背景技术:
2.随着视频安防监控行业的不断发展,视频监控在智慧城市监测中起到的作用越来越大。在合适监控点位上布局一定数量的前端监控摄像机,摄取相应场景数据,将数据汇总至nvr,再叠加中控显示及外网访问设备,即组成一个最基础的视频监控系统。根据是否具备自动调节又将前端监控摄像机分为固定监控摄像机和云台监控摄像机,由于云台监控摄像机可以远程控制监控视角,具有较好的监控灵活性,因此,云台监控摄像机的应用也越来越广泛。
3.当前二自由度的云台监控摄像机应用最为广泛,采用直流电机驱动的云台监控摄像机需要增加编码器,否则无法实现定位控制;而采用步进电机驱动则不存在此类问题,步进电机无需位置反馈装置。除此以外,根据当前的系统配置,监控摄像头的控制常采用单边驱动,长时间工作后,会出现单轴磨损现象,从而造成监控摄像头云台控制卡顿等问题,无法满足长时间稳定工作的要求。
技术实现要素:
4.本实用新型所要解决的技术问题在于,克服现有技术存在的技术缺陷和不足,提供一种步进电机驱动的二自由度球形视频监控终端装置,该装置结构紧凑,可以实现视角调整,并能够长时间稳定工作。
5.一种步进电机驱动的二自由度球形视频监控终端装置,包括自上而下布置的包含球形监控头、俯仰调节模块、偏航调节模块。
6.优先的是,本实用新型的偏航调节模块包含安装底座、偏航调节步进电机、减速模块、内齿偏航盘、俯仰调节模块安装板、偏航模块外壳,偏航调节步进电机固定在安装底座上,减速模块固定在偏航调节步进电机的输出轴上,减速模块的齿轮与内齿偏航盘齿轮啮合,从而驱动内齿偏航盘绕其中心旋转,俯仰调节模块安装板与内齿偏航盘固定连接在一起,内齿偏航盘的中间凸台嵌入偏航模块外壳中心孔内,仰调节模块安装板与内齿偏航盘将偏航模块外壳夹在中间。
7.优先的是,本实用新型的俯仰调节模块包含俯仰模块外壳、双输出轴俯仰调节步进电机、右减速模块、左减速模块、右传动外壳、左传动外壳、左支撑臂、右支撑臂、右输出同步轮、右同步带、右输入同步轮、左输出同步轮、左同步带、左输入同步轮,双输出轴俯仰调节步进电机固定安装在俯仰调节模块安装板上,左减速模块、右减速模块分别固定安装在双输出轴俯仰调节步进电机的两端,左减速模块固定安装在左支撑臂上,右减速模块固定安装在右支撑臂上,左减速模块的输出轴与左输出同步轮固定连接,右减速模块的输出轴与右输出同步轮固定连接,左输出同步轮通过左同步带驱动左输入同步轮转动,右输出同
步轮通过右同步带驱动右输入同步轮转动。
8.优先的是,本实用新型的左支撑臂上安装左传动外壳,右支撑臂上安装右传动外壳。
9.优先的是,本实用新型的球形监控头包含镜头、减速机构、调焦电机、视频传感器板、安装底板、球形外壳、圆形底盖,镜头固定安装在视频传感器板的摄像机模块上,减速机构固定安装在调焦电机的输出轴上,减速机构的齿轮与镜头的外齿轮啮合,调焦电机通过减速机构调节镜头的焦距;视频传感器板通过安装底板固定在圆形底盖上,视频传感器板与安装底板之间通过螺柱分离,圆形底盖与球形外壳通过螺丝固定连接,球形外壳的左右两侧的凸台分别嵌入俯仰调节模块的左支撑臂、右支撑臂,并且分别与左输入同步轮、右输入同步轮固定连接,球形监控头绕球形外壳的左右两侧凸台的中心轴线旋转。
10.优先的是,本实用新型的偏航调节模块中的偏航调节步进电机旋转时,俯仰调节模块和球形监控头同步旋转;俯仰调节模块中的双输出轴俯仰调节步进电机旋转时,球形监控头旋转;球形监控头中的调焦电机动作时,调节镜头的焦距。
11.本实用新型具有以下有益效果:
12.1、本实用新型采用双输出轴的步进电机驱动俯仰关节,受力平衡;由于驱动力为同一个步进电机驱动,具有较好的同步性。并且采用双边驱动机构,可以减小因为单边受力而造成的磨损等问题。
13.2、本实用新型的偏航调节步进电机旋转时,俯仰调节模块和球形监控头同步旋转;俯仰调节模块中的双输出轴俯仰调节步进电机旋转时,带动球形监控头旋转,调节镜头的焦距。本实用新型的步进电机驱动的二自由度球形视频监控终端装置具有偏航和俯仰两个可以调节视角的自由度,同时也具备调节监控摄像头焦距的功能。因此,本实用新型的步进电机驱动的二自由度球形视频监控终端装置结构紧凑,易于安装。
附图说明
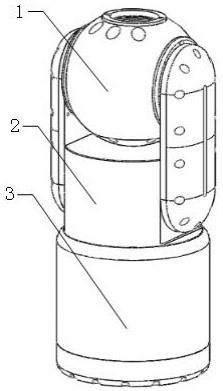
14.图1是本实用新型的球形视频监控终端装置结构示意图;
15.图2是本实用新型的球形视频监控终端装置的偏转机构三维示意图;
16.图3是本实用新型的球形视频监控终端装置的偏转机构前视图;
17.图4是本实用新型的球形视频监控终端装置的俯仰机构示意图;
18.图5是本实用新型的球形视频监控终端装置的俯仰机构传动链示意图;
19.图6是本实用新型的球形视频监控终端装置的摄像头安装示意图;
20.图7是本实用新型的球形视频监控终端装置的外壳安装示意图。
21.其中:1、球形监控头,2、俯仰调节模块,3、偏航调节模块,101、镜头,102、减速机构,103、调焦电机,104、视频传感器板,105、安装底板,106、球形外壳,107、圆形底盖,201、双输出轴俯仰调节步进电机,202、右减速模块,203、左减速模块,204、右传动外壳,205、左传动外壳,207、左支撑臂,208、右支撑臂,209、右输出同步轮,210、右同步带,211、右输入同步轮,212、左输出同步轮,213、左同步带,214、左输入同步轮,215、俯仰模块外壳,301、安装底座,302、偏航调节步进电机,303、减速模块,304、内齿偏航盘,305、俯仰调节模块安装板,306、偏航模块外壳。
具体实施方式
22.下面结合附图和实施例,对本实用新型作进一步详细说明。
23.参见图1所示,本实用新型的一种步进电机驱动的二自由度球形视频监控终端装置,该装置主要包含球形监控头1、俯仰调节模块2、偏航调节模块3三个部分。
24.参见图2、图3与图7所示,本实用新型偏航调节模块3主要包含安装底座301、偏航调节步进电机302、减速模块303、内齿偏航盘304、俯仰调节模块安装板305以及偏航模块外壳306。偏航调节步进电机302固定在安装底座301上,减速模块303固定在偏航调节步进电机302的输出轴上,减速模块303的齿轮与内齿偏航盘304齿轮啮合,从而驱动内齿偏航盘304绕其中心旋转。减速模块303有效地提高了偏航调节步进电机302的驱动力。俯仰调节模块安装板305与内齿偏航盘304固定连接在一起,内齿偏航盘304的中间凸台嵌入偏航模块外壳306中心孔内,仰调节模块安装板305与内齿偏航盘304将偏航模块外壳306夹在中间。
25.参见图4、图5与图7所示,本实用新型俯仰调节模块2主要包含双输出轴俯仰调节步进电机201、右减速模块202、左减速模块203、右传动外壳204、左传动外壳205、左支撑臂207、右支撑臂208、右输出同步轮209、右输入同步轮211、左输出同步轮212、左同步带213、右同步带210、左输入同步轮214、俯仰模块外壳215。双输出轴俯仰调节步进电机201固定安装在俯仰调节模块安装板305上,左减速模块203、右减速模块202分别固定安装在双输出轴俯仰调节步进电机201的两端,左减速模块203、右减速模块202同时固定安装在左支撑臂207、右支撑臂208上,并且左减速模块203、右减速模块202的输出轴分别与左输出同步轮212、右输出同步轮209固定连接,左输出同步轮212、右输出同步轮209通过左同步带213、右同步带210驱动左输入同步轮214、右输入同步轮211的转动,由于驱动力为同一个步进电机驱动,因此,具有较好的同步性。并且采用双边驱动机构,可以减小因为单边受力而造成的磨损等问题。
26.为了防止灰尘等问题,本实用新型在左支撑臂207、右支撑臂208上分别安装左传动外壳205、右传动外壳204。
27.参见图6与图7所示,本实用新型球形监控头1主要包含镜头101、减速机构102、调焦电机103、视频传感器板104、安装底板105、球形外壳106、圆形底盖107。视频传感器板104通过安装底板105固定在圆形底盖107上,视频传感器板104与安装底板105之间通过螺柱分离。镜头101固定安装在视频传感器板104的摄像机模块上,减速机构102固定安装在调焦电机103的输出轴上,减速机构102的齿轮与镜头101的外齿轮啮合,调焦电机103通过减速机构102调节镜头101的焦距。圆形底盖107与球形外壳106通过螺丝固定连接,球形外壳106的左右两侧的凸台嵌入俯仰调节模块2的左支撑臂207、右支撑臂208,并且与左输入同步轮214、右输入同步轮211固定连接,球形监控头1可以绕球形外壳106的左右两侧凸台的中心轴线旋转。
28.本实用新型偏航调节模块3中的偏航调节步进电机302旋转时,俯仰调节模块2和球形监控头1同步旋转;俯仰调节模块2中的双输出轴俯仰调节步进电机201旋转时,球形监控头1旋转;球形监控头1中的调焦电机103动作时,调节镜头101的焦距。因此,本实用新型的步进电机驱动的二自由度球形视频监控终端装置具有偏航和俯仰两个可以调节视角的自由度,同时也具备调节监控摄像头焦距的功能。本实用新型步进电机驱动的二自由度球形视频监控终端装置结构紧凑,易于安装,采用双输出轴的步进电机驱动俯仰关节,受力平
衡,不易发生磨损问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1