作业车辆的制作方法
1.本发明涉及一种作业车辆,所述作业车辆在从驱动源到驱动轮的行驶系统传动路径具备根据变速操作构件的操作状态进行输出控制的无级变速装置和根据制动操作构件的操作状态进行制动力的施加或解除的制动装置。
背景技术:
2.提出了一种作业车辆(以下,称为以往构成),所述作业车辆具备:hmt(液压
·
机械式无级变速装置),包括介设于从驱动源到行驶构件的行驶系统传动路径的hst(液压式无级变速机构)和行星齿轮机构;变速致动器,使所述hmt的变速状态发生变化;制动装置,能够对所述驱动轮工作地施加制动力;能够人为操作的变速操作构件及制动操作构件;以及控制装置,以使得所述hmt的输出根据所述变速操作构件的操作状态而变化的方式掌管所述变速致动器的工作控制,所述作业车辆根据对所述制动操作构件的人为操作而使所述制动装置成为接合状态或解除状态,所述控制装置,当检测到所述制动装置的接合状态时,以使得所述hst的可动斜板位于相当于车速为零的中立位置的方式使所述变速致动器工作,并且,当检测到所述制动装置从接合状态向解除状态的转变时,以使得所述可动斜板位于与制动装置的接合开始时间点的变速比相应的倾转位置或与所述变速操作构件在该时间点下的操作状态相应的倾转位置的方式使所述变速致动器工作(参照下述专利文献1)。
3.而且,所述以往构成构成为,在根据所述制动装置的接合状态而以使得hst可动斜板位于相当于车速为零的中立位置的方式使所述变速致动器工作时,从预先登记的多个控制曲线中选择一个控制曲线,并按照该一个控制曲线来进行所述变速致动器的工作控制。
4.所述以往构成能够有效地防止尽管所述制动装置成为接合状态而对所述驱动轮工作地施加制动力,但所述hmt朝向所述驱动轮持续输出旋转动力的情况,由此,在能够有效地防止在所述制动装置的接合状态时,制动距离不合理地延伸并且对所述hmt施加必要以上的负荷的情况这方面是有用的,但关于所述制动装置从接合状态向解除状态切换时的增速控制还存在改善的余地。
5.即,在所述以往构成中,在所述作业车辆的作业行驶期间中所述制动装置向接合状态转变并且之后向解除状态转变的情况下,在所述制动装置向解除状态转变时,将在所述制动装置的接合开始时间点存储的hst变速比作为再次开始行驶时的开始变速比读出,基于该开始变速比来决定hst变速比控制曲线,使hst变速比向增速侧阶段性地逐渐变更而并非急剧地变化,以使得进行顺畅的起步,但在所述专利文献1中未公开其具体的构成。
6.现有技术文献
7.专利文献
8.专利文献1:专利第4439183号公报
技术实现要素:
9.发明所要解决的课题
10.本发明是鉴于所述以往技术而做出的,目的在于提供一种作业车辆,所述作业车辆具备无级变速装置和制动装置,根据所述制动装置向接合状态的转变来进行所述无级变速装置的减速控制,并且根据所述制动装置从接合状态向解除状态的转变来进行所述无级变速装置的增速控制,所述作业车辆在增速控制时尽可能防止或减小变速冲击而能够进行顺畅的增速。
11.用于解决课题的技术方案
12.为了达成所述目的,本发明的第1技术方案提供一种作业车辆,所述作业车辆具备:驱动源;行驶构件;无级变速装置,对来自所述驱动源的旋转动力进行无级变速并朝向所述行驶构件输出;变速致动器,使所述无级变速装置的变速状态变化;制动装置,与所述行驶构件工作地接合而能够施加制动力;能够人为操作的变速操作构件和制动操作构件;以及控制装置,掌管所述变速致动器的工作控制,所述作业车辆构成为,根据所述制动操作构件的人为操作使所述制动装置接合或解除,所述控制装置具有在检测到所述制动装置的非工作状态、接合状态、以及解除状态时,分别启动的通常变速控制模式、制动接合变速控制模式、以及制动解除变速控制模式,在所述通常变速控制模式中,以使得所述行驶构件的行驶速度成为与所述变速操作构件的操作位置相应的操作速度的方式使所述变速致动器工作,在所述制动接合变速控制模式中,以按预定的控制速度使得所述行驶速度从检测到所述制动装置从非工作状态向接合状态的转变的制动接合开始时间点下的所述操作速度朝向车速零速进行减速的方式,使所述变速致动器工作,在所述制动解除变速控制模式中,以使得所述行驶速度从检测到所述制动装置从接合状态向解除状态的转变的制动解除开始时间点下的制动解除开始时速度增速至所述操作速度的方式,使所述变速致动器工作,在所述制动解除变速控制模式中,紧接在制动解除开始时间点之后的预定的制动解除始动期间的控制速度、和操作速度恢复时间点近前的预定的操作速度即将恢复前期间的控制速度中的至少一方比预定的基准控制速度缓慢。
13.在所述第1技术方案的第1例中,在所述控制装置中存储有时间分配系数,所述时间分配系数表示制动解除始动期间和操作速度即将恢复前期间各自的相对于所述制动解除变速控制模式的整体时间的时间分配,所述制动解除变速控制模式构成为,以与基准所需时间相同的时间使所述行驶速度从所述制动解除开始时速度增速至所述操作速度,并且基于所述基准所需时间、以及制动解除始动期间和操作速度即将恢复前期间各自的所述时间分配系数来决定制动解除始动期间和操作速度即将恢复前期间的长度,所述基准所需时间是以所述基准控制速度使所述行驶速度从所述制动解除开始时速度增速至所述操作速度时的所需时间。
14.在所述第1技术方案的第1例中,优选的是,在所述作业车辆中具备能够人为操作的时间分配变更构件,制动解除始动期间和操作速度即将恢复前期间各自的所述时间分配系数能够通过所述时间分配变更构件进行变更。
15.在所述第1技术方案的第2例中,制动解除始动期间的控制速度比所述基准控制速度缓慢,在所述控制装置中预先存储有制动解除始动期间的长度。
16.在所述第1技术方案的第2例涉及的作业车辆中,优选的是,具备能够人为操作的制动解除始动期间变更构件。
17.在该情况下,存储于所述控制装置的制动解除始动期间能够通过所述制动解除始
动期间变更构件进行变更。
18.在所述第1技术方案的第2例中,优选的是,所述制动解除变速控制模式可以具有在制动解除始动期间结束后以所述基准控制速度使所述行驶速度进行增速的基准控制速度期间。
19.更优选的是,在所述制动解除变速控制模式中,以如下方式使所述致动器工作:当所述行驶速度达到比所述操作速度低预定速度的操作速度侧切换速度时结束基准控制速度期间,在所述基准控制速度期间结束后的所述操作速度即将恢复前期间中,以比所述基准控制速度缓慢的控制速度使得所述行驶速度从所述操作速度侧切换速度增速至所述操作速度。
20.在所述第1技术方案的第2例涉及的作业车辆中,优选的是,具备设定所述操作速度与所述操作速度侧切换速度之间的速度差的能够人为操作的操作速度侧切换速度设定构件,所述操作速度侧切换速度是从所述操作速度减去由所述操作速度侧切换速度设定构件所设定的速度差而得到的速度。
21.为了达成所述目的,本发明的第2技术方案提供一种作业车辆,所述作业车辆具备:驱动源;行驶构件;无级变速装置,对来自所述驱动源的旋转动力进行无级变速并朝向所述行驶构件输出;变速致动器,使所述无级变速装置的变速状态变化;制动装置,与所述行驶构件工作地接合而能够施加制动力;能够人为操作的变速操作构件和制动操作构件;以及控制装置,掌管所述变速致动器的工作控制,所述作业车辆构成为,根据所述制动操作构件的人为操作使所述制动装置接合或解除,所述控制装置具有在检测到所述制动装置的非工作状态、接合状态、以及解除状态时,分别启动的通常变速控制模式、制动接合变速控制模式、以及制动解除变速控制模式,在所述通常变速控制模式中,以使得所述行驶构件的行驶速度成为与所述变速操作构件的操作位置相应的操作速度的方式使所述变速致动器工作,在所述制动接合变速控制模式中,以按预定的控制速度使得所述行驶速度从检测到所述制动装置从非工作状态向接合状态的转变的制动接合开始时间点下的所述操作速度朝向车速零速进行减速的方式,使所述变速致动器工作,在所述制动解除变速控制模式中,以使得所述行驶速度从检测到所述制动装置从接合状态向解除状态的转变的制动解除开始时间点下的制动解除开始时速度增速至所述操作速度的方式,使所述变速致动器工作,在所述制动解除变速控制模式中,所述行驶速度从所述制动解除开始时速度达到比所述制动解除开始时速度高预定速度的制动解除开始侧切换速度为止的制动解除始动期间的控制速度、和所述行驶速度从比所述操作速度低预定速度的操作速度侧切换速度达到所述操作速度为止的操作速度即将恢复前期间的控制速度中的至少一方比预定的基准控制速度缓慢。
22.在所述第2技术方案的第1例中,在所述控制装置中存储有速度分配系数,所述速度分配系数表示制动解除始动期间和操作速度即将恢复前期间各自的相对于在所述制动解除变速控制模式中进行变速的整体变速幅度的速度幅度,所述制动解除变速控制模式构成为,以与基准所需时间相同的时间使所述行驶速度从所述制动解除开始时速度增速至所述操作速度,并且基于所述整体变速幅度、以及制动解除始动期间和操作速度即将恢复前期间各自的所述速度分配系数来决定制动解除开始侧切换速度和操作速度侧切换速度,所述基准所需时间是以所述基准控制速度使所述行驶速度从所述制动解除开始时速度增速
至所述操作速度时的所需时间。
23.在所述第2技术方案中,优选的是,在所述作业车辆中具备能够人为操作的速度分配变更构件,制动解除始动期间和操作速度即将恢复前期间各自的所述速度分配系数能够通过所述速度分配变更构件进行变更。
24.在所述第2技术方案的第2例中,制动解除始动期间的控制速度比所述基准控制速度缓慢,在所述控制装置中存储有所述制动解除开始时速度与所述制动解除开始侧切换速度之间的制动解除开始侧速度差。
25.在该情况下,在所述制动解除变速控制模式中,基于所述制动解除开始时速度和所述制动解除开始侧速度差算出所述制动解除开始侧切换速度。
26.优选的是,所述第2技术方案的第2例涉及的作业车辆可以具备设定所述制动解除开始侧速度差的能够人为操作的制动解除开始侧速度差变更构件。
27.在该情况下,存储于所述控制装置的制动解除开始侧速度差能够通过所述制动解除开始侧速度差变更构件进行变更。
28.在所述第2技术方案的第2例中,优选的是,所述制动解除变速控制模式可以具有在制动解除始动期间结束后以所述基准控制速度使所述行驶速度进行增速的基准控制速度期间。
29.更优选的是,操作速度即将恢复前期间的控制速度比所述基准控制速度缓慢。
30.在该情况下,在所述控制装置中存储有所述操作速度与所述操作速度侧切换速度之间的操作速度侧速度差,在所述制动解除变速控制模式中,当所述行驶速度达到根据所述操作速度和所述操作速度侧速度差算出的所述操作速度侧切换速度时,结束所述基准控制速度期间并转变为所述操作速度即将恢复前期间。
31.优选的是,所述第2技术方案的第2例涉及的作业车辆可以具备设定所述操作速度侧速度差的能够人为操作的操作速度侧速度差变更构件。
32.在该情况下,所述操作速度侧速度差能够通过所述操作速度侧速度差变更构件进行变更。
33.优选的是,本发明的所述第1技术方案和第2技术方案涉及的作业车辆具备能够人为操作的基准控制速度变更构件,基准控制速度能够通过所述基准控制速度变更构件进行变更。
34.优选的是,本发明的所述第1技术方案和第2技术方案涉及的作业车辆具备能够人为操作的制动解除始动期间用控制速度变更构件,制动解除始动期间中的控制速度能够通过所述制动解除始动期间用控制速度变更构件进行变更。
35.例如,制动解除始动期间中的控制速度可以被设定为,行驶速度的增速比例在整个该制动解除始动期间内恒定。
36.替代于此,制动解除始动期间中的控制速度可以被设定为,行驶速度的增速比例随着时间经过而变大。
37.优选的是,本发明的所述第1技术方案和第2技术方案涉及的作业车辆具备能够人为操作的操作速度即将恢复前期间用控制速度变更构件,操作速度即将恢复前期间中的控制速度能够通过所述操作速度即将恢复前期间用控制速度变更构件进行变更。
38.例如,操作速度即将恢复前期间中的控制速度可以被设定为,行驶速度的增速比
例在整个该操作速度即将恢复前期间内恒定。
39.替代于此,操作速度即将恢复前期间中的控制速度可以被设定为,行驶速度的增速比例随着时间经过而变小。
40.在本发明的所述第1技术方案和第2技术方案涉及的作业车辆中,优选的是,所述制动装置构成为,在制动解除始动期间内成为完全解除状态。
41.优选的是,本发明的所述第1技术方案和第2技术方案涉及的作业车辆可以具备检测所述制动操作构件的操作状态的制动操作传感器。
42.在该情况下,所述控制装置基于来自所述制动操作传感器的检测信号来检测所述制动装置的非工作状态、接合状态、以及解除状态。
43.在本发明的所述第1技术方案和第2技术方案涉及的作业车辆中,优选的是,所述无级变速装置为包括hst和行星齿轮机构的hmt,所述hst根据基于所述变速致动器的变速动作将从所述驱动源输入的旋转动力向正反双方向进行无级变速并输出,所述行星齿轮机构将从所述驱动源及所述hst输入的旋转动力合成,并将合成旋转动力朝向所述行驶构件输出,所述hmt构成为,在所述hst的输出速度为中立速度与反转侧最高速之间的反转侧预定转速时,合成旋转动力的输出速度成为零速,随着所述hst的输出速度从反转侧预定转速经由中立速度向正转侧最高速变速,合成旋转动力的输出速度从零速向前进侧最高速变速,随着所述hst的输出速度从反转侧预定转速向反转侧最高速变速,合成旋转动力的输出速度从零速向后退侧最高速变速。
44.发明的效果
45.根据本发明涉及的作业车辆,能够根据制动装置向接合状态的转变使行驶速度减速并且根据所述制动装置从接合状态向解除状态的转变使行驶速度增速,而且,同时能够尽可能防止或减小所述制动装置从接合状态向解除状态的转变时的增速控制时的变速冲击而进行顺畅的增速。
附图说明
46.图1是本发明的实施方式1涉及的作业车辆的传动示意图。
47.图2是形成图1所示的所述作业车辆中的无级变速装置的hmt的剖视图。
48.图3是图2所示的所述hmt中的hst的液压电路图。
49.图4是表示所述hst的输出转速与所述hmt的输出转速的关系的图表。
50.图5是所述作业车辆中的制动操作构件的立体图,示出了位于非操作位置(初始位置)的状态。
51.图6是所述制动操作构件的立体图,示出了位于最大接合操作位置的状态。
52.图7是示出在以一操作模式操作了所述制动操作构件的情况下,由所述实施方式1涉及的作业车辆中的控制装置进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
53.图8是示出在以其他操作模式操作了所述制动操作构件的情况下,由所述控制装置进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
54.图9是示出在以与图7中相同的操作模式操作了所述制动操作构件的情况下,由所述控制装置的第1变形例的控制构造进行变速控制的行驶速度(所述hmt的输出速度)的变
化状况的图表。
55.图10是示出在以与图7中相同的操作模式操作了所述制动操作构件的情况下,由所述控制装置的第2变形例的控制构造进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
56.图11是示出在以与图7中相同的操作模式操作了所述制动操作构件的情况下,由所述控制装置的第3变形的控制构造进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
57.图12是由所述控制装置进行的变速控制的流程图。
58.图13是所述控制装置中的制动解除变速控制模式的流程图。
59.图14是所述控制装置中的制动解除变速控制模式的变形例的流程图。
60.图15是示出在以与图7中相同的操作模式操作了所述制动操作构件的情况下,由本发明的实施方式2涉及的作业车辆中的控制装置进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
61.图16是示出在以与图15中相同的操作模式操作了所述制动操作构件的情况下,由图15的第1变形例涉及的控制构造进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
62.图17是示出在以与图15中相同的操作模式操作了所述制动操作构件的情况下,由图15的第2变形例涉及的控制构造进行变速控制的行驶速度(所述hmt的输出速度)的变化状况的图表。
63.图18是基于所述实施方式2涉及的作业车辆中的控制装置的制动解除变速控制模式的流程图。
64.附图标记说明
65.1:作业车辆;
66.10:驱动源;
67.15:行驶构件;
68.100:hmt(无级变速装置);
69.110:hst;
70.150:行星齿轮机构;
71.300:制动装置;
72.500:液压伺服机构(变速致动器);
73.700:控制装置;
74.710:变速操作构件;
75.720:制动操作构件;
76.725:制动操作传感器;
77.745s、745e:时间分配变更构件;
78.750s、750e:速度分配变更构件;
79.740b:基准控制速度变更构件;
80.740c:制动解除始动期间用控制速度变更构件;
81.740d:操作速度即将恢复前期间用控制速度变更构件;
82.760s:制动解除始动期间变更构件;
83.765s:制动解除开始侧速度差变更构件;
84.765e:操作速度侧速度差变更构件。
具体实施方式
85.实施方式1
86.以下,参照附图对本发明涉及的作业车辆的一实施方式进行说明。
87.在图1中示出本实施方式涉及的作业车辆1的传动示意图。
88.如图1所示,所述作业车辆1具备驱动源10、驱动轮等行驶构件15、无级变速装置100、以及制动装置300,所述无级变速装置100对来自所述驱动源10的旋转动力进行无级变速并朝向所述行驶构件15输出,所述制动装置300与所述行驶构件15工作地接合而能够施加制动力。
89.在本实施方式中,如图1所示,所述无级变速装置100为具有液压式无级变速机构110(以下,称为hst)和行星齿轮机构150的液压
·
机械式无级变速装置(以下,称为hmt),所述hst110对从所述驱动源10工作地输入的旋转动力进行无级变速,所述行星齿轮机构150将从所述驱动源10工作地输入的旋转动力与从所述hst110工作地输入的旋转动力进行合成,并将合成旋转动力朝向所述行驶构件15输出。
90.当然,所述无级变速装置100也可以变形为仅具有所述hst110。
91.所述作业车辆1具有左右一对第1行驶构件及第2行驶构件15(1)、15(2)作为所述行驶构件15,具有将所述无级变速装置100的旋转动力向所述第1行驶构件及第2行驶构件15(1)、15(2)进行差动传递的差动齿轮机构320。
92.详细而言,所述作业车辆1具有分别工作地驱动所述第1行驶构件及第2行驶构件15(1)、15(2)的左右一对第1驱动车轴及第2驱动车轴17(1)、17(2),所述差动齿轮机构320构成为,将从所述无级变速装置100工作地传递的旋转动力向所述第1驱动车轴及第2驱动车轴17(1)、17(2)进行差动传递。
93.此外,在本实施方式中,如图1所示,所述作业车辆1还具有齿轮式变速机构250,所述齿轮式变速机构250在从所述驱动源10到所述行驶构件15的行驶系统传动路径中,介设于所述无级变速装置100与所述差动齿轮机构320之间。
94.所述齿轮式变速机构250具有:工作地输入来自所述无级变速装置100的旋转动力的副变速输入轴252、副变速输出轴254、包括能够从所述副变速输入轴252向所述副变速输出轴254传递旋转动力的低速齿轮列256l及高速齿轮列256h的多个副变速齿轮列、以及使所述多个变速齿轮列中的一个齿轮列成为传动状态的换档装置258。
95.在该情况下,所述无级变速装置100作为主变速装置发挥作用,所述齿轮式变速机构250作为副变速装置发挥作用。
96.如图1所示,所述齿轮式变速机构250和所述差动齿轮机构320收纳于所述作业车辆1所具备的变速箱200内,所述第1驱动车轴及第2驱动车轴17(1)、17(2)被支承于所述变速箱200。
97.在图2中示出所述无级变速装置100的剖视图。
98.如图1和图2所示,在本实施方式中,所述无级变速装置100具有收纳所述hst110和
所述行星齿轮机构150的壳体102,所述壳体102可装卸地连结于所述变速箱200。
99.在图3中示出所述hst110的液压电路图。
100.如图1~图3所示,所述hst110具备:泵轴112和马达轴122,被所述壳体102支承为绕轴线旋转自如;液压泵114,以被所述泵轴112支承为不能绕轴线相对旋转的状态收纳于所述壳体102;液压马达124,以被所述马达轴122支承为不能绕轴线相对旋转的状态收纳于所述壳体102,并且经由一对工作油管路400a、400b与所述液压泵114流体连接;以及泵侧斜板116和马达侧斜板126,分别划定所述液压泵114和所述液压马达124的容积量,所述泵侧斜板116和所述马达侧斜板126中的至少一方被设为根据绕摆动轴线的倾转位置使所对应的液压泵114或液压马达124的容积量变化的可动斜板。
101.如图1~图3所示,在本实施方式中,所述泵侧斜板116是可动斜板,另一方面,所述马达侧斜板126是固定斜板。
102.如图3所示,所述hst110还具有:辅助泵130、供给管路410、溢流阀412、充填管路(英文:charge line)415以及止回阀417,所述辅助泵130由所述泵轴112驱动,所述供给管路410从所述辅助泵130接受压力油供给,所述溢流阀412设定所述供给管路410的液压,所述充填管路415的一端部与所述供给管路410流体连接且在分支点416分支为第1分支管路及第2分支管路415a、415b,所述第1分支管路及第2分支管路415a、415b的压力油流动方向下游端部分别与所述第1工作油管路及第2工作油管路400a、400b流体连接,所述止回阀417以允许压力油从所述供给管路410向对应的工作油管路400a、400b的流入且防止反向的流动的方式分别介设于所述第1分支管路及第2分支管路415a、415b。
103.在本实施方式中,所述hst110还具有高压溢流阀420,所述高压溢流阀420以与所述止回阀417并联的状态分别设置于所述第1分支管路及第2分支管路415a、415b。所述高压溢流阀420在一方的工作油管路(例如,第1工作油管路400a)的异常高压时,使该一方的工作油管路400a的压力油经由连接于另一方的工作油管路400b的分支管路415b和介设于该分支管路415b的所述止回阀417向另一方的工作油管路400b溢流。
104.另外,在所述第1分支管路及第2分支管路415a、415b中的一方设置有绕过介设于该一方的分支管路的所述止回阀417的旁通管路422、和介设于所述旁通管路422的节流部424。
105.所述旁通管路422和所述节流部424是为了在可能的范围内防止hst工作效率的恶化的同时确保hst中立幅度而设置的,优选的是,设置于所述一对第1工作油管路及第2工作油管路400a、400b中的与后退时高压侧的工作油管路(例如,第2工作油管路400b)流体连接的分支管路415b。
106.如图1和图2所示,所述行星齿轮机构150具有太阳轮152、与所述太阳轮152啮合的行星齿轮154、与所述行星齿轮154啮合的内齿轮156、以及行星架158,所述行星架158将所述行星齿轮154支承为绕轴线旋转自如且与所述行星齿轮154绕所述太阳轮152的公转联动地绕所述太阳轮152的轴线旋转,所述太阳轮152、所述行星架158以及所述内齿轮156形成行星三要素。
107.向所述行星三要素中的第1要素工作地输入所述hst110的输出,向第2要素工作地输入来自所述驱动源10的动力,从第三要素输出合成旋转动力。
108.在本实施方式中,如图1和图2所示,所述太阳轮152、所述内齿轮156以及所述行星
架158分别作为所述第1要素~第三要素发挥作用。
109.如图1和图2所示,所述无级变速装置100还具有输入轴105和hmt输出轴195,所述输入轴105输入从所述驱动源10工作地传递的旋转动力,所述hmt输出轴195与所述第三要素(在本实施方式中为所述行星架158)工作地连结。
110.所述输入轴105与所述泵轴112配置在同轴上,传动方向上游侧的第1端部105a与所述驱动源10工作地连结,并且传动方向下游侧的第2端部105b经由联轴器106连结于所述泵轴112。
111.在本实施方式中,如图1所示,在使所述壳体102连结于所述变速箱200的状态下,所述输入轴105的第1端部105a以不能绕轴线相对旋转的方式与被支承于所述变速箱200的输入传动轴205连结。
112.此外,所述输入传动轴205经由带轮传动机构等传动机构202与所述驱动源10工作地连结。
113.所述内齿轮156经由设置于所述联轴器106的传动齿轮107输入来自所述驱动源10的旋转动力。
114.所述hmt输出轴195在所述壳体102连结于所述变速箱200的状态下,以不能绕轴线相对旋转的方式连结于被所述变速箱200支承的传动轴。
115.在本实施方式中,如图2所示,所述hmt输出轴195与所述太阳轮152配置在同轴上,传动方向上游侧的第1端部连结于所述行星架158,并且传动方向下游侧的第2端部连结于所述传动轴。
116.此外,在本实施方式中,如图1所示,所述副变速输入轴252是供所述hmt输出轴195连结的所述传动轴。
117.在图4中示出表示所述hst110的输出(所述马达轴122的旋转动力)的转速与所述hmt的输出(所述行星齿轮机构150的合成旋转动力)的转速的关系的图表。
118.在本实施方式中,所述hmt构成为,在所述hst110的输出速度被设为中立速度hst(n)与反转侧最高速hst(rmax)之间的反转侧预定转速hst(rs)时,合成旋转动力的输出速度(即,行驶速度)成为零速0,随着所述hst110的输出速度从反转侧预定转速hst(rs)经由中立速度hst(n)向正转侧最高速hst(fmax)变速,合成旋转动力的输出速度从零速向前进侧最高速fmax变速,随着所述hst110的输出速度从反转侧预定转速hst(rs)向反转侧最高速hst(rmax)变速,合成旋转动力的输出速度从零速0向后退侧最高速rmax变速。
119.通过该构成,能够在行驶系统传动路径中不具备前进后退切换机构的情况下进行前进行驶和后退进驶,并且能够使前进侧最高速fmax的绝对值比后退侧最高速rmax大,与后退进驶相比能够扩大使用频率高的前进行驶的可变速范围。
120.如图1所示,在本实施方式中,所述制动装置300具有分别向所述左右一对第1驱动车轴及第2驱动车轴17(1)、17(2)施加制动力的第1行驶制动机构及第2行驶制动机构300(1)、300(2)。
121.在本实施方式中,所述第1行驶制动机构及第2行驶制动机构300(1)、300(2)为摩擦板式。
122.如图1和图3所示,所述作业车辆1还具备使所述无级变速装置100的变速状态发生变化的变速致动器、能够人为操作的变速操作构件710及制动操作构件720、以及掌管所述
变速致动器的工作控制的控制装置700。
123.所述制动装置300构成为,根据对所述制动操作构件720的人为操作来进行接合与解除的切换。
124.在本实施方式中,所述作业车辆1具有将所述制动操作构件720与所述制动装置300的工作部工作连结的制动连杆机构305(参照下述图5和图6),所述制动装置300产生与所述制动操作构件720的操作量成比例的大小的制动力。
125.当然,也可以替代所述制动连杆机构305而具备液压式致动器或电动马达等电气式致动器等制动致动器,所述液压式致动器包括以液压的方式使所述制动装置300工作的液压构造、和根据对所述制动操作构件720的操作来进行向所述液压构造的油路的切换的电磁阀,所述电气式致动器根据对所述制动操作构件720的操作而使所述制动装置300工作。
126.在该情况下,所述控制装置700构成为,以使得所述制动装置300成为与对所述制动操作构件720的人为操作相应的工作状态的方式进行所述制动致动器的工作控制。
127.如图3所示,本实施方式涉及的作业车辆1具有电控式液压伺服机构500作为所述变速致动器。
128.如图3所示,所述液压伺服机构500具有以能够往复运动的方式收纳于伺服空间505的伺服活塞510、和使所述伺服活塞510连结于所述泵侧斜板116的连结销520。
129.在本实施方式中,所述伺服空间505形成于所述壳体102。
130.所述伺服活塞510以在所述伺服空间505的长方向一端侧及另一端侧分别液密地划定第1油室及第2油室506a、506b的状态收纳于所述伺服空间505,通过向所述第1油室506a的压力油供给以及从所述第2油室506b的压力油排出而向轴线方向一方侧的第1轴线方向移动,并且通过向所述第2油室506b的压力油供给以及从所述第1油室506a的压力油排出而向轴线方向另一方侧的第2轴线方向移动。
131.所述连结销520以使得可动斜板(在本实施方式中为所述泵侧斜板116)根据所述伺服活塞510向第1轴向方向及第2轴线方向的移动而分别绕摆动轴线向第1方向和第2方向倾转的方式,将所述伺服活塞510与所述可动斜板连结。
132.另一方面,在本实施方式中,所述泵侧斜板116为被设置于所述壳体102的凹状的斜板承受部支承为能够绕摆动轴线倾转的摇架型,与所述连结销520的基端侧工作连结。
133.由此,当所述伺服活塞510向第1轴线方向移动时,所述连结销520与所述伺服活塞510一起向第1轴线方向移动,对所述泵侧斜板116施加向所述第1轴线方向的推动力。
134.当受到向第1轴线方向的推动力时,所述泵侧斜板116沿着由所述斜板承受部划定的摆动轨迹,绕摆动轴线向第1方向倾转。
135.如图3所示,所述液压伺服机构500还具备压力油管路530、第1供排管路及第2供排管路535a、535b、排放管路540、切换阀600、操作活塞770、连结构件760、以及第1电磁比例阀及第2电磁比例阀820a、820b,所述压力油管路530从液压源接受压力油,所述第1供排管路及第2供排管路535a、535b分别与所述第1油室及第2油室506a、506b流体连接,所述切换阀600切换所述压力油管路530、所述第1给排管路535a、所述第2给排管路535b、以及所述排放管路540的连接状态,所述操作活塞770以在操作空间的长方向一端侧及另一端侧分别液密地划定第1操作油室155a和第2操作油室的状态能够往复运动地收纳于该操作空间,所述连
结构件760使所述操作活塞770与所述切换阀600连结,所述第1电磁比例阀及第2电磁比例阀820a、820b分别切换对所述第1操作油室及第2操作油室155a、155b的压力油供排。
136.所述切换阀600可以设为以能够往复运动的方式收纳于所述伺服活塞510的中央轴线孔的滑阀。
137.所述切换阀600构成为能够取第1方向工作位置(例如hst正转方向工作位置)、第2方向工作位置(例如hst反转方向工作位置)及保持位置,所述第1方向工作位置是使所述第1给排管路535a与所述压力油管路530流体连接而向所述第1油室506a供给压力油并且使所述第2给排管路535b与所述排放管路540流体连接而从所述第2油室506b排出压力油,从而使所述伺服活塞510向轴线方向一方侧移动的位置,所述第2方向工作位置是使所述第1给排管路535a与所述排放管路540流体连接而从所述第1油室506a排出压力油并且使所述第2给排管路535b与所述压力油管路540流体连接而向所述第1油室506a供给压力油,从而使所述伺服活塞510向轴线方向另一方侧移动的位置,所述保持位置是使所述第1供排管路及第2供排管路535a、535b封闭,将所述伺服活塞510保持在该时间点下的轴线方向位置的位置。
138.所述操作活塞770通过向所述第1操作油室155a的压力油供给以及从所述第2操作油室155b的压力油排出而向第1长方向移动,并且通过向所述第2操作油室155b的压力油供给以及从所述第1操作油室155a的压力油排出而向第2长方向移动。
139.所述连结构件760以使得所述切换阀600根据所述操作活塞770向第1长方向及第2长方向的移动而分别朝向第1方向工作位置及第2方向工作位置移动的方式,将所述操作活塞770与所述切换阀600工作连结。
140.所述控制装置700根据输入信号来进行所述第1电磁比例阀及第2电磁比例阀820a、820b的工作控制,由此变更所述hst110的输出速度(即,所述hmt的输出速度)。
141.此外,在本实施方式中,具备所述液压伺服机构500作为所述变速致动器,但当然,只要能够通过基于所述控制装置700的控制使所述无级变速装置100的变速部(在本实施方式中为所述泵侧斜板116)工作,就能够采取各种构成。
142.例如,作为所述变速致动器,也可以具备电动马达来替代所述液压伺服机构500。
143.所述变速操作构件710的操作状态由所述作业车辆1所具备的变速操作传感器715(参照图3)来检测。
144.例如,可以够成为,所述变速操作构件710设为能够绕变速操作轴线进行转动操作,所述变速操作传感器715检测所述变速操作构件710绕变速操作轴线的转动角度。
145.在该情况下,所述变速操作传感器715将所述变速操作构件710的绕所述变速操作轴线的一方侧及另一方侧的转动端分别作为前进侧最高速位置和后退侧最高速位置进行检测,将绕所述变速操作轴线的前进侧最高速位置与后退侧最高速位置之间的预定的中间位置作为车速零速的位置进行检测。
146.在图5和图6中示出所述制动操作构件720的立体图。
147.在本实施方式中,所述制动操作构件720能够绕制动操作轴线721在非操作位置(初始位置)与最大接合操作位置之间进行转动操作。图5和图6分别示出位于非操作位置(初始位置)和最大接合操作位置的状态。
148.图5和图6中的附图标记723是对所述制动操作构件720朝向非操作位置(初始位置)施力的制动复位弹簧。
149.即,克服所述制动复位弹簧723的施加力而进行对所述制动操作构件720的制动操作,当解除对所述制动操作构件720的人为操作力时,所述制动操作构件720通过所述制动复位弹簧723的施加力而返回到非操作位置(初始位置)。
150.以下,对基于所述控制装置700的变速控制构造进行说明。
151.所述作业车辆1具有检测所述制动装置300的状态的制动传感器,所述控制装置700具有在基于来自所述制动传感器的检测信号检测到所述制动装置300的非工作状态、接合状态、以及解除状态时分别启动的通常变速控制模式、制动接合变速控制模式、以及制动解除变速控制模式作为所述变速致动器的工作控制模式。
152.在本实施方式中,作为所述制动传感器,具有检测所述制动操作构件720的操作状态的制动操作传感器,所述控制装置700基于来自所述制动操作传感器的检测信号来判别所述制动装置300的非工作状态、接合状态、以及解除状态。
153.具体而言,如图3、图5及图6所示,本实施方式涉及的所述作业车辆1具有检测所述制动操作构件720绕制动操作轴线721的转动角度的制动转动角传感器725作为所述制动操作传感器。
154.关于所述制动操作传感器,可以替代制动转动角传感器725、或者除了制动转动角传感器725以外,具有制动通断开关727。
155.所述制动通断开关727检测所述制动操作构件720是否超过从非操作位置(初始位置)绕制动操作轴线721朝向最大接合操作位置离开预定阈值(例如,绕制动操作轴线721的3.5
°
)的通断位置地被向最大接合操作位置的方向操作。
156.所述控制装置700基于来自所述制动操作传感器的检测信号,
157.·
将所述制动操作构件720持续位于制动非操作范围(绕制动操作轴线721从非操作位置(初始位置)到通断位置的范围)的状态判断为所述制动装置300的非工作状态,
158.·
将所述制动操作构件720位于制动操作范围(绕制动操作轴线721从通断位置到最大操作位置的范围)的状态判断为所述制动装置300的接合状态,
159.·
将所述制动操作构件720从制动操作范围移动到制动非操作范围的状态判断为所述制动装置300的解除状态。
160.此外,如上所述,在本实施方式中,所述作业车辆1具有制动转动角传感器725和制动通断开关727作为所述制动操作传感器,所述控制装置700基于来自所述制动通断开关727的信号,判断所述制动操作构件720位于制动非操作范围和制动操作范围中的哪一个。
161.替代于此,在不具有所述制动通断开关727的情况下,所述控制装置700能够基于来自所述制动转动角传感器725的信号来判断所述制动操作构件720位于制动非操作范围和制动操作范围中的哪一个。
162.在图7中示出以一操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装置100的输出速度)的变化状况。
163.在图7所示的操作模式中,在制动接合开始时间点t1,将所述制动操作构件720从制动非操作范围向制动操作范围操作,在制动接合解除开始时间点t2,将所述制动操作构件720从制动操作范围向制动非操作范围操作。
164.在图7中,
165.·
在不进行对所述制动操作构件720的人为操作而所述制动操作构件720原样地
位于制动非操作范围的期间(即,从时间点0到制动接合开始时间点t1为止的期间)中启动通常变速控制模式,
166.·
在所述制动操作构件720进行制动接合操作的期间(即,从制动接合开始时间点t1到制动解除开始时间点t2为止的期间)中启动制动接合变速控制模式,
167.·
在从制动解除开始时间点t2到经过工作时间tx为止的期间(即,从制动解除开始时间点t2到时间点t5为止的期间)中启动制动解除变速控制模式,
168.·
在通过制动解除变速控制模式而行驶速度达到了与所述变速操作构件710的操作位置相应的操作速度vt后的期间(即,时间点t5以后的期间)中再次启动通常变速控制模式。
169.在通常变速控制模式中,以使得所述行驶构件15的行驶速度成为与所述变速操作构件710的操作位置相应的操作速度vt的方式执行所述变速致动器(在本实施方式中为所述液压伺服机构500)的工作控制。
170.详细而言,所述作业车辆1具有直接或间接地检测所述行驶构件15的行驶速度的车速传感器,在通常变速控制模式中,以使得由所述车速传感器检测的行驶速度成为与由所述变速操作传感器715检测的操作位置相应的操作速度vt的方式使所述变速致动器工作。
171.如图1所示,本实施方式涉及的作业车辆1具有检测所述无级变速装置的输出速度的变速输出传感器735作为所述车速传感器。
172.在本实施方式中,如图1和图2所示,所述变速输出传感器735具备检测所述马达轴122的转速的hst传感器735a、和检测所述hmt输出轴195的转速的hmt传感器735b,但也可以省略所述hst传感器735a和所述hmt传感器735b中的任一方。
173.即,例如,在仅具备所述hst传感器735a的情况下,基于所述马达轴122的转速和所述行星齿轮机构150的变速比算出所述hmt输出轴195的输出速度。
174.在制动接合变速控制模式中,以按预定的控制速度a(参照图7)使得所述行驶构件15的行驶速度(在本实施方式中为所述无级变速装置100的输出速度)从检测到所述制动装置300从非工作状态向接合状态的转变的制动接合开始时间点t1下的所述操作速度vt朝向车速零速进行减速的方式,使所述变速致动器工作。
175.所述控制速度a预先设定登记于所述控制装置700。
176.优选的是,所述预定控制速度a能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的制动接合控制速度变更构件740a(参照图3)进行变更。
177.如上所述,在本实施方式中,构成为,所述无级变速装置100设为所述hmt,在所述hst110的输出速度为中立速度hst(n)与反转侧最高速hst(rmax)之间的反转侧预定转速hst(rs)时,所述hmt的输出速度成为车速零速。
178.因此,在本实施方式中,在制动接合变速控制模式中,所述控制装置700以使得所述hst110的输出速度成为反转侧预定转速hst(rs)的方式使所述变速致动器工作。
179.与此不同,在所述无级变速装置100仅由所述hst110构成的情况下,在制动接合变速控制模式中,所述控制装置700以使得所述hst110的输出速度成为中立速度的方式使所述变速致动器工作。
180.此外,在图7所示的所述制动操作构件720的操作模式中,在行驶速度减速至车速
零速之前的阶段,所述制动装置300从接合状态转变为解除状态,制动解除开始时间点t2下的行驶速度(以下,称为制动解除开始时速度)vr比车速零速大。
181.当然,也可以在行驶速度成为车速零速之前持续维持所述制动装置300的接合状态,在行驶速度成为车速零速之后使所述制动装置300从接合状态向解除状态转变。
182.在图8中示出所述制动操作构件720在该操作模式下的行驶速度的变化状况。
183.在图8所示的所述制动操作构件720的操作模式中,根据制动接合开始时间点t1下的制动接合操作,启动制动接合变速控制模式,由此,以预定的控制速度a使行驶速度从制动接合开始时间点t1下的操作速度vt朝向车速零速进行减速,并在时间点ta成为车速零速。
184.之后,在从时间点ta起经过预定时间后的制动解除开始时间点t2,对所述制动操作构件720进行制动解除操作,与之相应地启动制动解除变速控制模式。
185.因此,在图8所示的操作模式中,制动解除开始时输出速度vr成为车速零速。
186.在所述制动解除变速控制模式中,以使得行驶速度从检测到所述制动装置300从接合状态向解除状态的转变的制动解除开始时间点t2下的制动解除开始时速度vr恢复为与所述变速操作构件710的操作位置相应的操作速度vt的方式使所述变速致动器工作,在此基础上,具备下述构成。
187.即,如图7所示,在所述制动解除变速控制模式中,以使得所述行驶构件15的行驶速度在与预定的基准控制速度b相应的基准所需时间t内从制动解除开始时速度vr恢复为所述操作速度vt,并且紧接在制动解除开始时间点t2之后的预定的制动解除始动期间ts的控制速度c(制动解除始动期间控制速度)、和操作速度即将恢复的时间点t5之前的预定的操作速度即将恢复前期间te的控制速度d(操作速度即将恢复前期间的控制速度)比基准控制速度b缓慢的方式使所述变速致动器工作。
188.在此,基准控制速度b、制动解除始动期间控制速度c以及操作速度即将恢复前期间控制速度d预先设定登记于所述控制装置700。
189.另外,基准所需时间t是指以基准控制速度b使得从制动解除开始时速度vr增速为操作速度vt的情况下所需的时间。
190.根据该构成,仅通过使所述制动装置300从接合状态向解除状态转变,就能够使行驶速度自动地恢复到与所述变速操作构件710的操作位置相应的操作速度vt,并且能够有效地防止或减小此时可能产生的变速冲击,能够实现顺畅的增速。
191.此外,在本实施方式中,如图7所示,制动解除始动期间控制速度c和操作速度即将恢复前期间控制速度d双方均比基准控制速度b缓慢,但当然,也可以仅使控制速度c和控制速度d中的任一方比基准控制速度b缓慢。
192.在图9中示出在应用了制动解除变速控制模式的第1变形例的控制构造中,以与图7中相同的操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装置100的输出速度)的变化状况。
193.在图9所示的第1变形例中,仅使制动解除始动期间控制速度c比基准控制速度b缓慢。
194.在图10中示出在应用了制动解除变速控制模式的第2变形例的控制构造中,以与图7中相同的操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装
置100的输出速度)的变化状况。
195.在图10所示的第2变形例中,仅使操作速度即将恢复前期间控制速度d比基准控制速度b缓慢。
196.另外,在本实施方式以及第1变形例和第2变形例中,在制动解除始动期间ts和操作速度即将恢复前期间te双方中,行驶速度相对于时间经过的增速比例被设为恒定(即,在图7~图10中,制动解除始动期间控制速度c和操作速度即将恢复前期间控制速度d由直线表示),但本发明并不限定于该形式的构成。
197.在图11中示出在应用了制动解除变速控制模式的第3变形例的控制构造中,以与图7中相同的操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装置100的输出速度)的变化状况。
198.图11所示的第3变形例变形为,在制动解除始动期间ts中,行驶速度的增速比例随着时间经过而逐渐变大(图11中的制动解除始动期间控制速度c成为向下凸的弯曲状),并且在操作速度即将恢复前期间te中,行驶速度的增速比例随着时间经过而逐渐变小(图11中的操作速度即将恢复前期间控制速度d成为向上凸的弯曲状)。
199.即,只要制动解除始动期间ts的开始时间点t2与结束时间点t3之间的行驶速度的平均增速比例(即,由图7和图11中的(vs-vr)/(t3-t2)划定的平均增速比例)、和/或操作速度即将恢复前期间te的开始时间点t4与结束时间点t5之间的行驶速度的平均增速比例(即,由图7和图11中的(vt-ve)/(t5-t4)划定的平均增速比例)比由基准控制速度b划定的平均增速比例缓慢即可,制动解除始动期间ts和/或操作速度即将恢复前期间te中的行驶速度的变速模式能够进行各种变形。
200.以下,对基于所述控制装置700的变速控制构造的流程进行说明。在图12中示出基于所述控制装置700的变速控制构造的流程图。
201.所述控制装置700在与所述作业车辆1的主电源接通动作相应的初始状态下,启动通常变速控制模式(步骤11)。
202.在通常变速控制模式启动时,如上所述,所述控制装置700以使得由所述车速传感器检测的行驶速度成为由所述变速操作传感器715检测的操作速度vt的方式使所述变速致动器工作。
203.在没有输入主电源断开操作等行驶结束信号的情况下(在步骤12中为否(no)的情况下),所述控制装置700判断所述制动装置300是否从未工作状态转变为了接合状态(步骤21)。
204.在本实施方式中,所述控制装置700基于来自所述制动操作传感器的检测信号来判断所述制动装置300是否从未工作状态转变为了接合状态。
205.在所述制动装置300处于未工作状态的情况下(在步骤21中为否的情况下),维持通常变速控制模式(步骤11)。
206.另一方面,在检测到所述制动装置300向接合状态的转变的情况下(在步骤21中为是(yes)的情况下),所述控制装置700启动制动接合变速控制模式来替代通常变速控制模式(步骤22)。
207.在制动接合变速控制模式启动时,如上所述,所述控制装置700以按预定的控制速度a(参照图7)使得由所述车速传感器检测的行驶速度从制动接合开始时间点t1下的操作
速度vt朝向车速零速进行减速的方式使所述变速致动器工作。
208.所述控制装置700维持制动接合变速控制模式,直到检测到所述制动装置300从接合状态向解除状态的转变为止(步骤23)。
209.在检测到所述制动装置300向解除状态的转变的情况下(在步骤23中为是的情况下),所述控制装置700启动制动解除变速控制模式来替代制动接合变速控制模式(步骤24)。
210.在此,对制动解除变速控制模式的详情进行说明。在图13中示出制动解除变速控制模式的流程图。
211.当启动制动解除变速控制模式时,所述控制装置700首先基于制动解除开始时间点t2下的行驶速度vr和与该时间点下的所述变速操作构件710的操作位置相应的操作速度vt来算出应该变速的变速幅度δv,并基于该δv和预先设定登记的基准控制速度b算出通过制动解除变速控制模式使行驶速度恢复到操作速度vt时所需的基准所需时间t(步骤31)。
212.优选的是,基准控制速度b能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的基准控制速度变更构件740b(参照图3)进行变更。
213.此外,在图7中,制动解除开始时间点t2下的操作速度vt与制动接合开始时间点t1下的操作速度vt被设为同一速度,但本发明当然也可以适用于制动解除开始时间点t2下的操作速度vt与制动接合开始时间点t1下的操作速度vt不同的情况。
214.所述控制装置700基于预先设定登记于该控制装置700的时间分配算出制动解除始动期间ts和操作速度即将恢复前期间te(步骤32)。
215.即,在所述控制装置700中,预先设定登记有制动解除始动期间ts和操作速度即将恢复前期间te各自的相对于所述制动解除变速控制模式的整体时间的时间分配系数xs和xe(0≤xs,xe《1),所述控制装置700基于ts=xs
×
基准所需时间t、以及te=xe
×
基准所需时间t算出制动解除始动期间ts和操作速度即将恢复前期间te。
216.例如,在系数x1为1/3且系数x2为1/4的情况下,制动解除始动期间ts成为t/3且操作速度即将恢复前期间te成为t/4。
217.此外,在步骤32中,所述控制装置700能够一并算出制动解除始动期间ts与操作速度即将恢复前期间te之间的中间期间tc。
218.优选的是,所述系数xs和系数xe能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的时间分配变更构件745s、745e(参照图3)进行变更。
219.所述控制装置700以按预先设定登记于所述控制装置700的制动解除始动期间控制速度c使得行驶速度从制动解除开始时间点t2下的制动解除开始时速度vr进行增速的方式使所述变速致动器工作(步骤33)。
220.在此,控制速度c比基准控制速度b缓慢。
221.所述控制装置700维持以控制速度c进行的增速控制直到经过制动解除始动期间ts为止(即,直到时间t到达从制动解除开始时间点t2起经过了制动解除始动期间ts的制动解除开始侧切换时间点t3为止)(步骤34)。
222.优选的是,控制速度c能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的制动解除始动期间用控制速度变更构件740c进行变更。
223.此外,在进行了所述制动装置300从接合状态向解除状态的切换后到所述制动装置300完全成为解除状态为止的期间中,同时进行所述无级变速装置100的增速动作与所述制动装置300的接合动作。
224.因此,优选所述制动装置300尽可能迅速地转变为完全解除状态。
225.关于这一点,优选的是,在以比基准控制速度b缓慢的控制速度c进行所述无级变速装置100的增速的制动解除始动期间ts内成为完全解除状态。
226.接着,所述控制装置700检测制动解除开始侧切换时间点t3下的行驶速度vs(步骤35)。
227.所述控制装置700基于制动解除始动期间ts、制动解除变速控制模式中的作为控制目标速度的操作速度vt、以及预先设定登记的操作速度即将恢复前期间控制速度d,算出操作速度即将恢复前期间te的开始时间点t4下的目标行驶速度ve(步骤36)。
228.在此,控制速度d比基准控制速度b缓慢。
229.优选的是,控制速度d能够由使用者经由以能够人为操作的方式设置于所述作业车辆的操作速度即将恢复前期间用控制速度变更构件740d进行变更。
230.所述控制装置700基于操作速度即将恢复前期间te的开始时间点t4下的行驶速度ve与制动解除开始侧切换时间点t3下的行驶速度vs之间的变速幅度δvc、和操作速度即将恢复前期间te的开始时间点t4与制动解除开始侧切换时间点t3之间的时间,算出制动解除始动期间ts与操作速度即将恢复前期间te之间的中间期间tc中的控制速度e(步骤37)。
231.之后,所述控制装置700以按控制速度e使得行驶速度从制动解除开始侧切换时间点t3下的行驶速度vs进行增速的方式使所述变速致动器工作(步骤38)。
232.当时间达到t4或者行驶速度达到ve时,结束中间期间tc中的控制速度e下的增速控制(步骤39)。
233.所述控制装置700在判断为时间达到t4或者行驶速度达到ve时(步骤39),以按控制速度d使得行驶速度进行增速的方式使所述变速致动器工作(步骤40)。
234.然后,所述控制装置700在检测到时间达到t5或者行驶速度达到操作速度vt时(步骤41),结束制动解除变速控制模式,启动作为初始控制模式的通常变速控制模式(从图12的步骤24至步骤11)。
235.图13所示的制动解除变速控制模式基于“时间”来规定制动解除始动期间ts和操作速度即将恢复前期间te,但本发明并不限定于该形式。
236.在图14中示出制动解除变速控制模式的变形例的流程图。
237.图14所示的变形例基于“行驶速度”来规定制动解除始动期间ts和操作速度即将恢复前期间te。
238.在所述变形例中,当启动制动解除变速控制模式时,所述控制装置700首先基于制动解除开始时间点t2下的行驶速度vr和与该时间点下的所述变速操作构件710的操作位置相应的操作速度vt算出应该变速的变速幅度δv(步骤51)。
239.接着,所述控制装置700基于δv和预先设定登记于该控制装置700的速度分配,算出制动解除始动期间的结束时间点t3下的行驶速度vs(即,制动解除开始侧切换速度)、和操作速度即将恢复前期间te的开始时间点t4下的行驶速度ve(即,操作速度侧切换速度)(步骤52)。
240.详细而言,在所述控制装置700中,预先设定登记有表示在制动解除始动期间中应该增速的变速幅度相对于在所述制动解除变速控制模式中应该变速的整体变速幅度的比例的速度分配系数(以下,称为制动解除始动期间速度分配系数ys,0≤ys《1)、和表示在操作速度即将恢复前期间te中应该增速的变速幅度相对于所述整体变速幅度的比例的速度分配系数(以下,称为操作速度即将恢复前期间速度分配系数ye,0≤ye《1),所述控制装置700基于vs=vr+ys
×
δv、以及ve=vt-ye
×
δv算出制动解除开始侧切换速度vs和操作速度侧切换速度ve。
241.例如,在系数ys为1/3且系数ye为1/4的情况下,在制动解除始动期间中增速δv/3,在操作速度即将恢复前期间中增速δv/4。
242.优选的是,所述系数ys和系数ye能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的速度分配变更构件750s、750e(参照图3)进行变更。
243.所述控制装置700以预先设定登记于该控制装置700的制动解除始动期间控制速度c进行增速的方式使所述变速致动器工作,直到行驶速度从vr达到vs(步骤53和54)。
244.在此,所述控制装置700算出制动解除始动期间ts和操作速度即将恢复前期间te以外的中间期间tc中的控制速度e(步骤55~57)。
245.具体而言,所述控制装置700基于δv和预先设定登记于该控制装置700的基准控制速度b算出制动解除变速控制模式的基准所需时间t(步骤55)。
246.然后,所述控制装置700基于制动解除开始时间点t2、基准所需时间t、操作速度vt、操作速度侧切换速度ve、以及预先设定登记的操作速度即将恢复前期间控制速度d算出中间期间tc(步骤56)。
247.即,所述控制装置700识别行驶速度增速至vs的时间点(即,制动解除开始侧切换时间点t3),因此,基于tc=((t2+t)-(vt-ve)/d)-t3算出中间期间tc。
248.接着,所述控制装置700基于e=(ve-vs)/tc算出中间期间tc中的控制速度e(步骤57)。
249.之后,所述控制装置700以按控制速度e使得行驶速度从vs增速至ve的方式使所述变速致动器工作(步骤58和59)。
250.然后,当行驶速度达到ve时,所述控制装置700以按预先设定登记的操作速度即将恢复前期间控制速度d使得行驶速度从ve增速至vt的方式使所述变速致动器工作(步骤60和61)。
251.所述控制装置700在检测到行驶速度达到操作速度vt时(步骤61),结束制动解除变速控制模式,启动作为初始控制模式的通常变速控制模式(从图12的步骤24至步骤11)。
252.实施方式2
253.以下,参照附图对本发明涉及的作业车辆的其他实施方式进行说明。
254.本实施方式涉及的作业车辆与所述实施方式1涉及的作业车辆相比,变更了根据所述制动装置300从接合状态向解除状态的转变而启动的制动解除变速控制模式的构成。
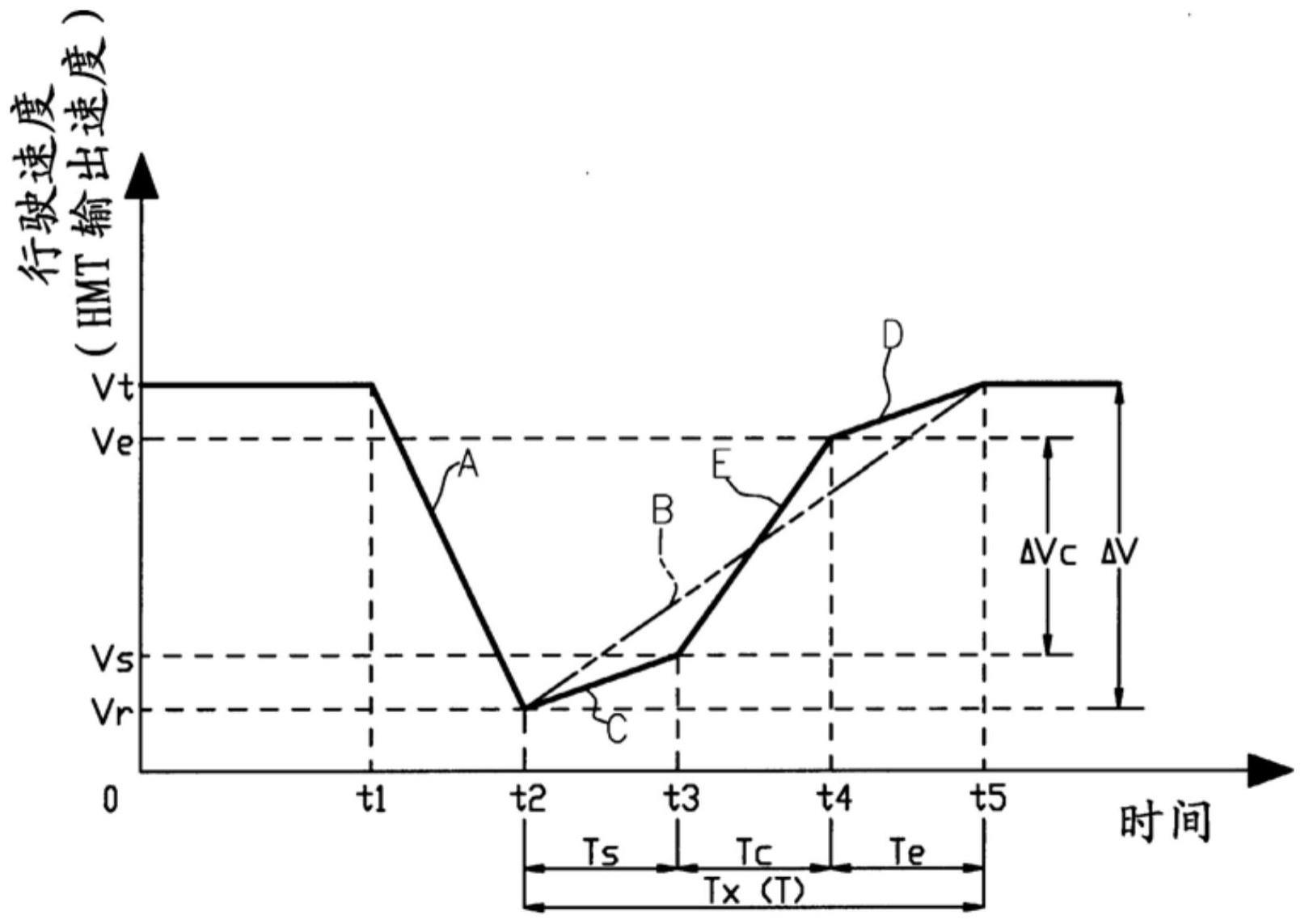
255.在图15中示出以与图7中的操作模式相同的操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装置100的输出速度)的变化状况。
256.如图7~图10所示,在所述实施方式1中采用的所述制动解除变速控制模式构成为,使行驶速度从制动解除开始时速度vr增速至操作速度vt时所需的工作时间tx与以基准
控制速度b使行驶速度从vr增速至vt的情况下所需的基准所需时间t相同。
257.即,在所述实施方式1中,为了使所述制动解除始动期间ts和/或所述操作速度即将恢复前期间te的控制速度比基准控制速度b缓慢,并且使所述制动解除变速控制模式的工作时间tx(即,使行驶速度从制动解除开始时速度vr增速至操作速度vt的时间)与基准所需时间t相同,在控制速度比基准控制速度b缓慢的期间以外的期间中的至少一部分中,使控制速度比基准控制速度b快。
258.具体而言,在图7和图8所示的构成中,为了使所述制动解除变速控制模式的工作时间tx与基准所需时间t相同,使所述中间期间tc中的控制速度e比基准控制速度b快。
259.在图9所示的构成中,为了使所述制动解除变速控制模式的工作时间tx与基准所需时间t相同,使制动解除始动期间ts以外的期间中的控制速度比基准控制速度b快。
260.在图10所示的构成中,为了使所述制动解除变速控制模式的工作时间tx
が
基准所需时间t相同,使操作速度即将恢复前期间te以外的期间中的控制速度比基准控制速度b快。
261.与此相对,在本实施方式中,如图15所示,制动解除始动期间ts中的控制速度c和操作速度即将恢复前期间te中的控制速度d比基准控制速度b缓慢,并且制动解除始动期间ts和操作速度即将恢复前期间te以外的中间期间ts中的控制速度e与基准控制速度b相同。
262.结果,所述制动解除变速控制模式的工作时间tx比基准所需时间t长。
263.在本实施方式中,也具有与所述实施方式1同样的效果,即,仅通过使所述制动装置300从接合状态向解除状态转变,就能够使行驶速度自动地恢复到与所述变速操作构件710的操作位置相应的操作速度vt,并且能够有效地防止或减小此时可能产生的变速冲击,能够实现顺畅的增速。
264.此外,在本实施方式中,如图15所示,制动解除始动期间控制速度c和操作速度即将恢复前期间控制速度d双方均比基准控制速度b缓慢,但当然,也可以仅使控制速度c和控制速度d中的任一方比基准控制速度b缓慢。
265.在图16中示出在应用了本实施方式中的制动解除变速控制模式的第1变形例的控制构造中,以与图15中相同的操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装置100的输出速度)的变化状况。
266.在图16所示的第1变形例中,制动解除始动期间ts中的制动解除始动期间控制速度c比基准控制速度b缓慢,并且制动解除始动期间ts以外的期间中的控制速度与基准控制速度b相同。
267.在图17中示出在应用了本实施方式中的制动解除变速控制模式的第2变形例的控制构造中,以与图15中相同的操作模式操作了所述制动操作构件720的情况下的行驶速度(所述无级变速装置100的输出速度)的变化状况。
268.在图17所示的第2变形例中,操作速度即将恢复前期间控制速度d比基准控制速度b缓慢,并且操作速度即将恢复前期间te以外的期间中的控制速度与基准控制速度b相同。
269.在图18中示出图15所示的制动解除变速控制模式的流程图。
270.当启动图15所示的构成的制动解除变速控制模式时,所述控制装置700以按比基准控制速度b缓慢的制动解除始动期间控制速度c使得行驶速度从制动解除开始时间点t2下的制动解除开始时速度vr进行增速的方式,使所述变速致动器工作(步骤61)。
271.与所述实施方式1同样地,制动解除始动期间控制速度c被预先存储于所述控制装置700,优选的是,其能够由使用者经由以能够人为操作的方式设置于所述作业车辆的所述制动解除始动期间用控制速度变更构件740c(参照图3)进行变更。
272.所述控制装置700维持以控制速度c进行的增速控制,直到从制动解除开始时间点t2起的经过时间达到预先存储于所述控制装置700的预定的制动解除始动期间ts、或者直到行驶速度v达到根据制动解除开始时速度vr和预先存储于所述控制装置的预定的制动解除开始侧速度差δvs算出的制动解除开始侧切换速度vs为止(步骤62)。
273.优选的是,制动解除始动期间ts能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的制动解除始动期间变更构件760s(参照图3)进行各种变更,例如,0.3秒、0.5秒等。
274.同样地,优选的是,制动解除开始侧速度差δvs能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的制动解除开始侧速度差变更构件765s(参照图3)进行各种变更,例如,3km/h、5km/h等。
275.当从制动解除开始时间点t2起的经过时间达到制动解除始动期间ts、或者行驶速度v达到制动解除开始侧切换速度vs时,所述控制装置700以按控制速度e使得行驶速度进行增速的方式使所述变速致动器工作(步骤63)。
276.此外,在本实施方式中,如图15~图17所示,控制速度e与基准控制速度b相同。
277.优选的是,控制速度e能够由使用者经由以能够人为操作的方式设置于所述作业车辆的中间期间用控制速度变更构件740e(参照图3)进行变更。
278.所述控制装置700维持以控制速度e进行的增速控制,直到行驶速度v达到根据操作速度vt和预先存储于所述控制装置700的预定的操作速度侧速度差δve算出的操作速度侧切换速度ve为止(步骤64)。
279.优选的是,操作速度侧速度差δve能够由使用者经由以能够人为操作的方式设置于所述作业车辆1的操作速度侧速度差变更构件765e(参照图3)进行各种变更,例如,3km/h、5km/h等。
280.当行驶速度v达到根据操作速度vt和操作速度侧速度差δve算出的操作速度侧切换速度ve时,所述控制装置700以按控制速度d使得行驶速度进行增速的方式使所述变速致动器工作(步骤65)。
281.所述控制装置700维持以控制速度d进行的增速控制直到行驶速度v达到操作速度vt为止(步骤66),当行驶速度v达到操作速度vt时,结束制动解除变速控制模式,启动作为初始控制模式的通常变速控制模式(从图12的步骤24至步骤11)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1