一种单轨吊轨道巡检机器人的制作方法
1.本发明涉及轨道巡检技术领域,具体公开了一种单轨吊轨道巡检机器人。
背景技术:
2.煤矿井下机电运输是矿井生产环节的重要组成部分,它贯穿了矿井的各个生产环节,目前巷道运输多使用轨道提升运输方式,随着煤矿巷道辅助运输的不断发展,单轨吊因其利用率高、维护方便费用低,可在各种竖曲线、平曲线及复杂曲线运行以及能直接到达采掘工作面等优点而被广泛使用,但由于轨道采用悬挂方式固定,且大负载的单轨吊车运行中易造成机身摇摆,对轨道造成多频次、大动量冲击,容易引起吊轨出现接头错位、轨道变形等缺陷,导致单轨吊安全可靠性大大降低,因而单轨吊的健康状况将直接决定着每一位生产工作人员的生命财产安全,然而现有的人工巡检不仅对巡检人员安全没有保障,而且巡检人员的主观判断以及低效率也是一大问题,由于单轨吊发展历史短,矿井巷道条件恶劣等因素,目前还未有高效可靠的缺陷检测装置,设计一款能够代替人工巡检进行高效自动巡检的单轨吊自然状态参数识别系统迫在眉睫,且有着较高的实际应用价值。
技术实现要素:
3.有鉴于此,本发明针对煤矿井下机电运输系统中单轨吊轨道的错位、轨道变形等问题,提供一种单轨吊巡检机器人装置。
4.为达到上述目的,本发明提供一种单轨吊巡检机器人,包括主体底板以及设置在主体底板上的移动部件、导向部件、驱动部件、传感部件、外壳;
5.主体底板上开设有若干装配孔和凹型槽,承重行走机构、侧向限位机构、纵向限位机构通过销连接在主体底板上,实现对单轨吊车的隔振与驱动;通过楔形开合机构与单轨吊轨道连接;
6.移动部件设置在主体底板的上方;导向部件设置在主体底板的上方,移动部件的外侧;驱动部件设置在主体底板下方,备用电池的外侧;外壳设置在主体底板的下方;传感部件设置在外壳的外侧周围;
7.移动部件包括两个承重行走轮、承重行走轮底座、上限位支杆、弹簧,承重行走轮底座通过螺栓孔固定在主体底板的凹型槽上,上限位支杆通过螺栓孔连接在承重行走轮底座另一侧,两个承重行走轮分别通过螺栓连接在承重行走轮底座和上限位支杆上,弹簧连接在承重行走轮底座和上限位支杆上的弹簧勾上,以调节两个承重行走轮的距离;
8.导向部件包括侧导向轮支架、侧导向轮、侧限位轮底座、弹簧、销,侧限位轮底座固定在主体底板的凹型槽上,侧导向轮支架通过销与弹簧固定在侧限位轮底座上,弹簧用于侧导向轮纵向微小位移,减缓冲击,侧导向轮固定在侧导向轮支架上;
9.驱动部件包括销轴连接杆、rfid射频识别器、wi-fi天线、备用电池,销轴连接杆通过螺栓连接在备用电池外壳外侧,rfid射频识别器与wi-fi天线固定在外壳的外侧,备用电池固定在备用电池外壳内;
10.传感部件包括摄像机,还包括超声波传感器,加速度传感器;所述壳体通过螺栓连接在主体底板的下方,摄像机底座通过螺栓固定在壳体下方。
11.进一步的,所述承重行走轮底座、侧限位轮底座均固定在主体底板的凹型槽上,承重行走轮底座另一侧与上限位支杆通过铰接孔铰接,两个承重行走轮分别固定在承重行走轮底座和上限位支杆上,两轮之间用弹簧连接,用于调节位置,侧导向轮支架通过销与弹簧固定在侧限位轮底座上,弹簧用于侧导向轮纵向微小位移,减缓冲击,侧导向轮固定在侧导向轮支架上,wi-fi天线固定在侧限位轮底座上。
12.进一步的,所述承重行走轮工作在单轨吊轨道内轨道,侧导向轮作用于单轨吊轨道外轨道。
13.进一步的,所述备用电池外壳通过螺栓连接在主体底板的下方,备用电池嵌入其中,由可拆卸盖板封住。备用电池外壳外部连接销轴连接杆,为机器人传感器提供备用。
14.进一步的,还包括摄像头,所述摄像机与摄像头铰接,可以在一定角度内转动。
15.本方案借助单轨吊车作为动力在轨道上移动,携带摄像机、超声波传感器、加速度传感器,开发轨道参数识别检测系统,可对轨道参数(y向、z向错位、直线度)进行检测、并对缺陷进行定位,实现轨道错位缺陷及直线度的自主检测,方便工作人员掌握运输系统的安全状态,有利于提高矿业企业无人化作业能力、减少人员和财产损失。
16.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
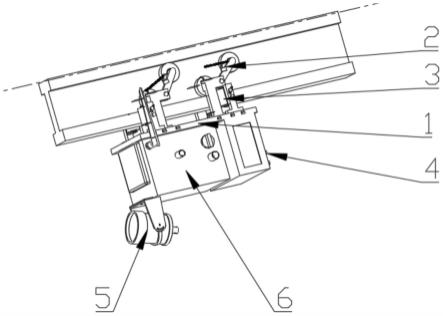
17.图1为本发明单轨吊巡检机器人结构示意图;
18.图2为本发明单轨吊巡检机器人主体底板零件示意图;
19.图3为本发明单轨吊巡检机器人结构框图;
20.图4为本发明单轨吊巡检机器人装配示意图;
21.图5为本发明单轨吊巡检机器人侧限位轮部件图;
22.图6为本发明单轨吊巡检机器人承重行走轮零件图;
23.图7为本发明单轨吊巡检机器人摄像机部件图;
24.图8为本发明单轨吊巡检机器人检测原理图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
27.如图1所示,本发明为一种单轨吊巡检机器人,包括主体底板1以及设置在主体底
板1上的移动部件2、导向部件3、驱动部件4、传感部件5、外壳6。
28.如图2所示,主体底板1上开设有若干装配孔和凹型槽,用于实现各部件之间的螺栓连接以及承重行走轮底座2-1和侧向限位导向轮底座3-1的安装。
29.如图3所示,承重行走机构2、侧向限位机构3、纵向限位机构通过销连接在主体底板上,实现对单轨吊车的隔振与驱动;通过楔形开合机构与单轨吊轨道连接,可实现快速拆卸。
30.如图4、图5、图6、图7所示,外壳6设置在主体底板1的下方,驱动部件4设置在外壳6外侧与备用电池4-3的外侧,驱动部件4包括销轴连接杆4-1,rfid射频识别器4-5,wi-fi天线4-6,备用电池4-3。销轴连接杆4-1通过螺栓连接在备用电池外壳4-2外侧,rfid射频识别器4-5与wi-fi天线4-6固定在外壳6的外侧,备用电池4-3固定在备用电池外壳4-2内。
31.移动部件2设置在主体底板1的上方,移动部件2包括承重行走轮(2-4,2-5),承重行走轮底座2-1,上限位支杆2-3,弹簧2-2。承重行走轮底座2-1通过螺栓孔2-1-1固定在主体底板1的凹型槽上,上限位支杆2-3通过螺栓孔2-1-4连接在承重行走轮底座2-1另一侧,两个承重行走轮(2-4,2-5)分别通过螺栓连接在承重行走轮底座2-1和上限位支杆2-3上,弹簧2-2连接在承重行走轮底座2-1和上限位支杆2-3上的弹簧勾2-1-2上,以调节两个承重行走轮(2-4,2-5)的距离。
32.导向部件3设置在主体底板1的上方,移动部件2的外侧,导向部件3包括侧导向轮支架3-4,侧导向轮3-5,侧限位轮底座3-1,弹簧3-3,销3-2。侧限位轮底座3-1固定在主体底板1的凹型槽上,侧导向轮支架3-4通过销3-2与弹簧3-3固定在侧限位轮底座3-1上,弹簧3-3用于侧导向轮纵向微小位移,减缓冲击,侧导向轮3-5固定在侧导向轮支架3-4上。
33.传感部件5设置在外壳6的外侧周围,传感部件5包括摄像机5-1,还包括超声波传感器,加速度传感器。所述壳体通过螺栓连接在主体底板1的下方,摄像机5-1底座通过螺栓固定在壳体下方,摄像头与摄像机铰接,可以在一定角度内转动。
34.如图8所述,本发明一种单轨吊巡检机器人通过超声波位移传感器检测错位间隙,通过机器视觉处理摄像机拍摄的图片检测轨道变形,通过rfid射频与惯导方法进行缺陷定位,与通过视频监控、缺陷显示、数据采集等信息控制上位机,共同对轨道缺陷进行识别。巡检方法包括以下步骤:
35.首先,对巡检机器人进行基于多传感器融合的轨道缺陷检测与定位的策略设计,采用超声位移传感器和加速度传感器对轨道接头错位缺陷进行检测,研究微小振动情况下求解位移变化的检测策略;开发基于rfid射频识别的巡检机器人缺陷定位系统。
36.然后,根据检测对象所处环境光线不均、运行存在小振动等特点,选择合适的视觉传感器和光源;为获得轨道整体走向的图像信息,构建面向轨道直线度的图像感知模型,分析图像采集过程中感知参数与机器人本体参数之间的关系,包括焦距、工作距离、巡检速度等;在此基础上,提出图像高效的采集策略,实现图像的连续采集。针对轨道振动问题,改进和设计防抖图像重构算法,以获得更加清晰的图像数据;采用python语言与opencv程序包对检测系统进行软件开发,包括常用阈值算法研究、图像噪声类型研究、防抖图像重构算法研究、轨道底部边缘提取算法研究和阈值取值研究。
37.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以
作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和本发明的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1