用于运行液压致动器的方法与流程
1.本发明涉及一种用于运行用于具有传动装置的车辆、尤其是机动车的液压致动器的方法,以及一种传动装置和一种车辆。
背景技术:
2.液压致动器例如用于机动车的自动变速器中,当其被操作时,通过施加液压能来实现机械效果。在液压切换元件的情况下,这可以是旋转的变速器部件通过离合器实现的耦合或如在双离合器变速器的换挡杆的情况下是机械调节运动。例如当自动变速器中传动比变化时,通常至少断开一个切换元件并接入另一个切换元件。切换元件既可构造成摩擦锁合的也可构造成形锁合的。摩擦锁合切换元件通常构造为多片式切换元件。在此区分多片式离合器和多片式制动器,借助多片式离合器可连接两个旋转的变速器元件,借助多片式制动器可将旋转的变速器元件与变速器壳体连接并且因此使旋转的变速器元件静止。
3.在操作液压致动器时,必须用工作介质(通常是液压油或变速器油)对其进行填充和加载压力。加载压力发生在快速填充阶段和压力增大阶段。如果液压致动器例如构造为摩擦锁合切换元件、如多片式离合器,则在压力增大阶段中,相互摩擦的切换元件半部在液压压力下越来越强地相互压紧,直到在切换元件半部之间形成抗扭的连接。在用于换挡杆的液压致动器中,其例如构造为气缸-活塞单元,相关的换挡套筒通过液压产生的运动移动并且因此形锁合地接合或脱开挡位。在此需要快速填充阶段,以便能够在来自电子控制器的换挡命令之后尽快开始压力增大阶段。在快速填充阶段期间,间隙、如空气间隙和切换元件的弹性在尽可能短的时间内得到补偿。“空气间隙”在下文中应理解为作用在切换元件上的液压活塞必须经过直到膜片之间的间隙减小到它们相互贴靠但不能为车辆驱动传递足够的扭矩的程度的距离。为了尽可能快地克服液压操作的离合器的空气间隙,在现有技术中通过快速填充——其在时间上在快速填充阶段上延伸——填充离合器直到接合点,这例如从de19955987a1中已知。从接合点开始扭矩传递。
4.快速填充阶段的时间长度(也称为快速填充时间)与排气的操作系统相配并适应于相应的操作系统。“操作系统”在下文中应理解为液压系统的一部分,在其中至少大致存在一个液压压力并且该液压压力可调节,该液压压力直接或间接地作用在液压致动器上。“间接作用”例如可理解为通过传动活塞或控制阀的阀活塞的压力作用。例如可通过电子压力调节器调节操作系统中的压力。
5.可惜尤其是在长时间未操作的状态后无法避免液压系统至少部分排空,从而空气积聚在操作系统中。由此,液压控制和待控制的液压致动器(如离合器或用于操作换挡杆的气缸)在其响应特性中具有极大增加的动态延迟,以至于加载液压致动器的实际压力曲线与电子控制器输出的目标压力曲线有很大的偏差。由此产生的延迟对叠加控制产生不可预见的特性并且还影响调节精度和由此可实现的舒适度。此外,除了用于操作外还用于冷却部件的液压油在高体积流量或在部件的高转速下很容易起泡。溶解在起泡的油中的空气在平静阶段逸出,从而空气也可由此积聚在操作系统中。
6.在操作液压致动器时,必须附加地压缩这些空气,例如为了移动离合器的活塞,这表现为待填充的附加体积。如果在控制中没有充分考虑到该附加体积,则离合器在快速填充阶段之后不位于接合点处并且因此仍必须有相对大量的体积流入操作路径和活塞腔中,以产生希望的压力变化并因此产生扭矩反应,由此液压系统表现迟缓。理论上,可通过相配地延长快速填充时间来充分补偿附加体积,如下面关于图1至4所述。在进一步运行期间,空气可通过设置的排气孔逸出。但只有在充分准确地了解空气在相应前提状态(如停工/停车时间、关停温度、关停角度等)下的比例时,才能精确、相配地选择延长时间。但这不能以简单的方式精确确定,而只能估计,这可能导致考虑不充分。
7.为了充分补偿气态夹杂对液压致动器的影响并且例如为了能够在良好的换挡舒适性下实现切换元件的传动能力的希望增加,可在操作系统和切换元件中设置相对昂贵的传感器(压力传感器、行程传感器或类似物),以便能够观察操作特性并对其作出反应。从de 102009055063 a1已知这样一种方法,在其中测量离合器压力并且相应地设计快速填充。
8.在没有传感器的系统中,空气的影响例如通过停止时间或起泡模拟来估计并在控制中相应地加以考虑。但该估计相对不精确,因为使操作通道漏尽的泄漏路径可能因生产而有很大差异并且可取决于运行状态以及可旋转和可操作部件的不可影响且不可确定的关停状态。
9.其它策略依赖于排气脉冲或排气等待时间。但这些措施不能可靠地排气,需要相对长的时间或将系统置于未定义的初始状态(如部分填充的离合器)。这种方法例如从de 102013224744 a1中已知。
技术实现要素:
10.本发明所基于的任务是提出一种方法,在其中在考虑操作系统中的气态夹杂的情况下对液压致动器进行填充和加载压力,使得在不需要传感器方面的额外费用的情况下在致动器中的目标压力曲线和实际压力曲线之间的偏差尽可能小。
11.所述任务通过独立权利要求1的技术方案解决。本发明的有利实施方式由从属权利要求产生。
12.据此,提出一种用于运行车辆的传动装置的液压致动器的方法,该传动装置包括:至少一个液压致动器;压力调节装置;和控制压力调节装置的电子控制器。在此致动器能通过操作系统被填充液体工作介质并且被加载液压压力以对该致动器进行操作,致动器中的压力增大包括首先的快速填充阶段和随后的压力增大阶段。根据本发明,在规定运行条件下,根据在液压致动器和/或操作系统之外检测到的运行参数调节快速填充阶段的时间长度和快速填充压力的高度,所述运行参数受液压致动器中的填充状态和因此压力情况的影响。因此,该运行参数不是致动器中或其操作系统本身中的致动器运行参数。
13.因此,可以有利的方式调节快速填充阶段的时间长度,而无需借助传感器检测致动器运行参数,其变化曲线将需要快速填充阶段长度的这种变化。在液压致动器和操作系统之外检测的运行参数本来就会被检测并在电子控制器中进行评估,以便运行传动装置或车辆。由此节省了致动器或操作系统中的特殊传感器的费用,这意味着更简单的结构、更少的部件数量、更简单的传动装置设计、更低的成本以及更不易出故障。
14.因此,既不直接也不间接在操作系统或致动器中测量在液压致动器中作用的致动
器运行参数。
15.致动器运行参数可以是液压压力或温度或致动器部件移动的距离。
16.优选致动器是摩擦锁合切换元件。
17.在此摩擦锁合切换元件可构造为多片式离合器或多片式制动器。
18.在另一种优选实施方式中可规定,摩擦锁合切换元件用于将内燃机耦合到机动车的传动系。
19.作为替代方案,优选致动器可以是传动装置内的摩擦锁合切换元件。
20.传动装置在此可构造为自动变速器、尤其是行星结构的有级自动变速器或双离合器变速器或无级自动变速器或车轴驱动机构或车轮驱动机构。
21.在液压致动器之外的运行参数可在传动装置之内或传动装置之外以及在车辆的任何位置进行检测。
22.此外,致动器可以是液压蓄能器。
23.此外,可规定,致动器是具有活塞的液压缸。
24.致动器尤其可以是用于操作换挡杆的装置。
25.优选车辆可包括至少一个驱动机器并且所述运行参数是至少一个驱动机器的运行参数。
26.驱动机器在此可以是内燃机或电动机或混合动力驱动装置,在混合动力驱动装置中内燃机和电机组合设置。
27.优选运行参数可以是至少一个驱动机器的扭矩,检测该扭矩并且从该扭矩的时间曲线推导出摩擦锁合切换元件中的压力情况。
28.替代或附加于此,运行参数可以是车辆的至少一个驱动机器的转速,检测该转速并且从该转速的时间曲线推导出摩擦锁合切换元件中的压力情况。
29.在驱动机器构造为电动机的情况下,运行参数可以是电动机随时间变化的电流消耗曲线并且从该电流消耗曲线推导出摩擦锁合切换元件中的压力情况和因此填充状态。
30.在致动器之外的运行参数也可以是车辆的加速度。
31.优选可以的是,快速填充压力根据运行参数的信号随时间变化的曲线而随时间变化。
32.替代于此可以的是,快速填充压力根据运行参数的信号的曲线随时间变化的梯度而随时间变化。
33.在另一种实施方式中,快速填充压力既可根据运行参数的信号的时间曲线也可根据运行参数的信号的时间曲线的随时间变化的梯度而随时间改变。
34.所描述的方法优选仅在传动装置处于预期会有空气在致动器或操作系统中积聚的运行状态中时实施。
35.该方法优选在下面的情况下实施:在车辆或传动装置是在规定的最短时间之前被关停的,和/或传动装置的油温低于规定值。
36.用于车辆的传动装置可包括至少一个液压致动器,该液压致动器借助上述方法运行。
37.在此情况下可以的是,所述液压致动器或其操作系统不具有用于检测任何致动器运行参数的传感器。
38.车辆可包括一个液压致动器和至少一个驱动机器,该液压致动器借助上述方法运行。
39.所述液压致动器可设置在传动装置内或传动装置之外的车辆上的任何位置处。
附图说明
40.下面详细阐述根据现有技术的方法和根据本发明的方法的实施例。附图如下:
41.图1-4示出根据现有技术的实施例的随时间变化的压力曲线;
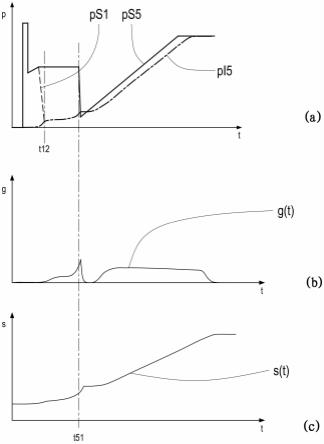
42.图5示出根据本发明的方法的第一种实施例的随时间变化的压力曲线;
43.图6示出混合动力传动系的示意图;
44.图7、即图7a-7c示出在根据图5的根据本发明的方法中不同运行参数的时间图表;并且
45.图8示出根据本发明的另一种实施例的随时间变化的压力曲线。
具体实施方式
46.图1的图表示出根据现有技术的用于运行自动变速器的方法中的压力p随时间t变化的曲线。压力p在此是摩擦锁合切换元件中的压力,当通过液压控制装置操作切换元件时,该压力应升高,直到切换元件半部以足够的力相互压靠,使得它们抗扭地相互耦合并且切换元件最迟从时间tc开始可以无滑差地传递扭矩。所示为目标压力ps1的曲线和由此产生的实际出现在切换元件中的实际压力pl1的曲线。实际压力也称为压力结果。
47.目标压力ps1是理想化的曲线,它例如相应于由电子控制器如电子压力调节器输出到阀装置的电流。借助该电流因此可调节切换元件中的压力及其时间曲线。电子压力调节器是将电流转换为液压压力的致动器。液压系统的包括阀装置直至切换元件的部分也称为操作系统或操作路径。传动装置或车辆可包括这种电子压力调节器。
48.在目标压力曲线ps1实际上是控制电子压力调节器并且根据理想的比例关系调节液压压力的电流的背景下,可理解所示的目标压力曲线ps1。目标压力曲线ps1在时间点t0陡峭、压力峰值状地上升到压力值p11不应理解为实际压力曲线pl1应增加到该值,而是压力值p11相应于过高的电流值,由此电子压力调节器从静止状态转换到运行状态。
49.如果摩擦锁合切换元件应从在切换元件半部之间仅能传递拖曳力矩的打开状态转换到闭合状态,则在所描述的在时间点t0激活电子压力调节器后,从时间点t1开始,将目标压力ps1控制到压力值p12,使得摩擦锁合切换元件的仍然无压力的体积尽快被填充工作介质、通常是液压油或变速器油。这是所谓的快速填充阶段的开始。在时间点t1之后,直到时间点t11切换元件中的压力平缓地上升到压力值p13,使得切换元件半部克服弹力相互预压紧,但作用于切换元件半部的压紧力仍然太低,以至于无法实现可用于行驶运行的扭矩传递。在实现完全填充和预压紧之后,通过将压力应相当陡地降低到压力值p14(压力值p14在时间点t12达到)来终止快速填充。从该时间点开始,斜坡形的压力增大开始,该压力增大随着在时间点tc达到压力值pc而结束,因为现在切换元件完全闭合并且可将扭矩无滑差地从输入侧传递到输出侧。从t0到t12的时间段也称为快速填充时间或快速填充阶段。
50.目标压力ps1设计用于操作系统的理想填充。图1的图表中所示的目标压力曲线ps1和实际压力曲线pl1之间的偏差例如出现在下面的情况下:自动变速器的液压系统已经
关停并且基于至少部分排空,空气进入到了液压系统中。在定义目标压力曲线ps1时没有考虑这个问题,因为目标压力曲线是以排气的操作系统为基础的。当自动变速器在工作温度下关停后再次启动时,不仅切换元件的弹性或空气间隙,而且操作系统中产生的空气体积都必须通过快速填充来填充。目标压力曲线与实际压力曲线之间的偏差也称为滞后误差,能够进入液压系统的空气越多,滞后误差就越明显。在极端情况下,例如当变速器在最高工作温度下关停并且之后可能在低于冰点的低温下冷却整夜,会出现这种情况。
51.图1示出实际压力曲线pl1与目标压力曲线ps1的明显偏差。实际压力曲线pl1从时间点t1开始缓慢上升并在时间点t12达到压力值p14,因此在该点中实际压力曲线pl1和目标压力曲线ps1几乎一致。但在进一步的时间过程中,根据目标压力曲线ps1填充切换元件的体积流量不足以足够快地填充由气态夹杂产生的体积,因此实际压力曲线pl1仅缓慢且平缓地上升且在时间点tc之后才能增加到由压力值pc预定的作为目标值的压力水平。根据目标压力曲线ps1,这应在时间点tc达到。基于该滞后误差,切换元件中的压力增大以不允许和不希望的方式延长,这不利地影响操作的自发性和实现精度。
52.理论上可通过相应延长快速填充时间来补偿由气态夹杂产生的附加体积。图2中的图表示出这种快速填充时间延长。快速填充时间的结束通过改变的目标压力曲线ps2从时间点t12延长延长时间δt1被推移到时间点t22。该效果表现为实际压力曲线pl2的上升,其上升速度明显快于同样在图2的图表中示出的实际压力曲线pl1并且因此也更早达到压力值pc,该压力值pc根据目标压力曲线ps2应在时间点tc2达到。因此至少部分考虑了操作系统中的空气。
53.图3中的图表示出与排气的操作系统的初始值t12相比进一步延长了延长时间δt2的快速填充时间。快速填充时间延长到时间点t32使得实际压力曲线进一步上升到实际压力曲线pl3,其现在从时间点t32开始以与目标压力曲线ps3相比相对小的滞后误差且以相同的斜率平行于目标压力曲线上升,并且仅基于与原理有关的、允许的液压延迟时间比追求的时间点tc3稍晚达到压力值pc。由此,精确相配地考虑了操作系统中的空气。
54.如果延长时间和因此快速填充时间选择得太长并且快速填充压力p43太晚地下降,如借助图4中的示例所示,产生的实际压力曲线pl4与图1和2中延长时间选择得太短时一样是不希望的。由于在压力值p42和p43之间移动的快速填充压力根据目标压力曲线ps4基于直到时间点t42的非常长的延长时间δt3而存在很长时间,因此切换元件被完全填充,从而从时间点t41开始实际压力曲线pl4以过调的形式急剧上升到压力值p45。该上升在时间点t42被截住,因为此时快速填充压力才从压力值p43下降到压力值p44并且因此快速填充阶段结束。实际压力曲线pl4因此在时间点t42达到局部最大值并且远高于希望的压力值p44。这种过压也增加了形锁合切换元件的传递能力,使得可能发生扭矩冲击(drehmomentstoβ),为了构件负荷和操作舒适性,应避免这种情况。在时间点t42之后,实际压力曲线pl4围绕目标压力曲线ps4振荡并且几乎与它同时在时间点tc4达到压力值pc。由此,过多地考虑了操作系统中的空气,这在极端情况下会导致更多不希望的在任何情况下都应被避免的反应。
55.不同的快速填充时间或延长时间下的实际压力曲线图表明在没有设置相配的延长时间情况下的后果。在实践中,设置相配的延长时间是很成问题的,因为不知道操作系统中有多少空气。基于延长时间过长时实际压力曲线pl4的严重缺点,因此在实践中将选择如
图2所示的过短的延长时间。尽管这会导致滞后误差,但不必担心压力过高时实际压力曲线pl4的严重缺点和图4中随后的振荡。但总体而言,在不知道操作系统中的空气体积的情况下对延长时间的任何选择都不会有令人满意的结果。延长时间δt1、δt2和δt3是在基于测试结果或计算的特定假设下确定的,基于不同的影响变量(如自动变速器的停止时间、温度、构件公差、运动部件的停顿状态和操作系统的体积),是否选择了适配的延长时间、如延长时间δt2是相当随机的。为安全起见,始终选择过短的延长时间如δt1并接受滞后误差。
56.如开头已经提到的,该缺点可通过将压力传感器设置在操作系统或切换元件中的费用来消除。因此,可观察切换元件中的压力增大并因此根据情况选择延长时间。但缺点是额外的压力传感器的高成本和部件费用。
57.不需要额外的压力传感器的根据本发明的方法的压力曲线在图5中的图表中示出。在此从自动变速器或车辆中其它运行参数的反应观察操作系统的效果并相应地设置延长时间,其方式是,只有在确定了反应的标准时才降低快速填充压力。因此,在根据图5的方法中,目标压力曲线ps5首先如在完全填充的操作系统中那样从压力值p52增加到最大快速填充压力值p53,该最大快速填充压力值在时间点t11达到并在进一步的时间进程中保持不变直到时间点t51。实际压力曲线pl5从时间点t11开始逐渐增加并且在恒定的目标压力曲线ps5的阶段中——在此期间填充切换元件的活塞室——也几乎保持恒定。增加类似于例如来自复位弹簧的活塞复位力的增加进行。在时间点t51之前不久,操作系统被这样填充,使得实际压力曲线pl5上升。在时间点t51,实际压力曲线pl5超过特定压力值或实际压力曲线pl5改变其梯度。
58.如果现在将压力传感器设置在操作系统中,则时间点t51的该压力上升可用作触发快速填充压力或目标压力曲线ps5突然降低的标准,但本发明的主要任务是避免压力传感器的费用。如果操作系统中没有压力传感器并且因此不测量实际压力pl5,则不会察觉它的上升。但由于实际压力曲线pl5的上升会影响传动装置或车辆中的液压致动器之外的其它运行参数,这些运行参数本来就会在电子控制器中被检测,以实现传动装置的功能,因此根据本发明利用这些运行参数来推断实际压力曲线pl5,这在图7a-7c中示出。
59.根据应标记快速填充阶段结束的标准,在时间点t51快速填充压力的目标值从压力值p53突然降低到压力值p54,该压力值p54在时间点t52达到。由此产生相对于时间点t11的延长时间δt4。由于压力下降,实际压力曲线pl5不再增加,而是在压力值p55上停留一段时间并在斜坡状增加的压力增大阶段中以轻微的时间延迟跟随目标压力曲线ps5。同样,实际压力曲线pl5以与希望的时间点tc5相比略有时延的滞后误差并且以与目标压力曲线ps5相同的斜率达到作为目标值的压力值pc。
60.与操作系统中存在的空气体积无关,现在总是通过根据标准控制快速填充压力来设定正确的延长时间并且相配地考虑空气体积。
61.如果在常规快速填充时间结束时没有发生预期的反应,则继续维持填充控制,直到可以观察到预期的反应。从可以观察到预期反应的时间点开始,适合地结束填充控制。在此情况下,“适合”意味着过程要么跳跃式地结束,要么运行一个结束或转移过程,要么后续再控制一段时间。
62.本示例基于自动变速器,其设计为混合动力结构中的双离合器变速器。双离合器变速器的示意性结构在图6中示出。内燃机vkm可通过离合器k0与电动机em耦合。双离合器
dk作为传动装置与电动机em抗扭地连接,所述双离合器dk包括两个离合器k1和k2,它们在行驶运行中可选择性地闭合。示意性双离合器变速器只是该方法的应用的一种示例,该方法也可用于任何其它具有液压致动器的变速器结构,所述液压致动器待填充工作介质以对该液压致动器进行操作。
63.驱动机器可以是内燃机或电动机或包括内燃机和电机的混合动力驱动装置。
64.如果现在在图6的双离合器变速器中在内燃机vkm静止且离合器k0、k1和k2打开或滑动的情况下驱动电动机em,并且离合器k0为了其操作而在快速填充阶段中被填充并被加载压力,则会建立低扭矩,该扭矩——为了保持当前转速——反映在电动机的电流消耗中。电动机em的电流消耗是其实际扭矩的量度。
65.因此,在本系统中可利用:em必须抵消通过离合器k0耦合的内燃机vkm拖曳力矩(vkm未运行)以便例如在车辆静止且怠速控制器激活时保持转速。在应根据驾驶策略操作离合器k0的情况下(例如在车辆静止状态中启动内燃机vkm),可根据适合的信号(例如驱动传动系统中的扭矩或转速)监控反应。在此可观察和评估信号值和信号值的变化(梯度)。
66.电流消耗在电子控制器中作为扭矩的信号s被检测,该信号关于时间t在图7c的图表中显示为随时间t变化的信号曲线s(t)。图7b中的图表示出相关的梯度曲线g(t),即信号曲线s(t)对时间t的导数。图7a在图表中示出作为运行参数的图5中的实际压力曲线pl5。
67.其信号或其导数可用作标准的其它运行参数原则上是所有的允许推导出切换元件上作用的实际扭矩的信号。这例如是电动机em上的扭矩平衡、电动机em的转速曲线、内燃机vkm的转速曲线、内燃机vkm的扭矩以及来自扭矩传感器、系统压力传感器、体积流量传感器、加速度传感器或位置传感器的信号。
68.在时间点t51,不仅在信号曲线s(t)中而且也在梯度曲线g(t)中都显示出对图7a中的实际压力曲线pl5上升的反应,这意味着电动机em中的扭矩增加。梯度值g的大小和信号值s的大小以及这两个参数在此可用作标准,在达到这个标准时,通过在时间点t51将目标压力曲线ps5从压力值p53减少到压力值p54来降低快速填充压力,压力值p54应在时间点t52达到。因此,梯度曲线g(t)提供有关驱动机器上的例如扭矩变化动态的信息。如果信号值s(t)本身已经是操作的量度,则它本身也是有意义的。
69.图8示出该方法的一种优化实施方式,其中观察在操作系统之外或者说外部的反应。在此在目标压力曲线ps6中在第一个压力峰值之后作为快速填充压力输出压力值p62,该压力值保持恒定直到时间点t61,该时间点相应于目标压力曲线ps1的时间点t12。这样做是为了在填充过程开始时避免在操作系统甚至还没有反应期间太快地达到最终的快速填充压力水平。由此确保了主要由压力值p62或p63与环境压力p0之间的受控压力差决定的体积流量在没有预期背压的情况下最初为了填充被空气加载的系统而不高于所期望的流量,否则会导致压力增大过快,使得压力值过高。
70.从时间点t61开始是与目标压力曲线ps1相比的延长时间δt5(在该延长时间内快速填充压力从压力值p62降低到压力值p63,该压力值p63在时间点t62达到),以便在快速填充阶段结束时更缓慢地填充切换元件,使得反应直到控制完成不那么强烈。但在此保持最低水平是有意义的。从时间点t62起,快速填充压力保持恒定在压力值p63,直到用作标准的运行参数的反应在时间点t63发生,随后快速填充压力在目标压力曲线ps6中突然降低到压力值p64,该压力值应在时间点t64达到。实际压力曲线pl6——其在快速填充阶段结束时、
即在时间点t64之前上升,因为待填充的体积已满——基于目标压力曲线ps6的降低现在保持恒定在压力值p65,该压力值p65仅与希望的压力值p64略有偏差并且以滞后误差且以相同的斜率平行地跟随目标压力曲线ps6直到时间点tc8的作为目标值的压力值pc。
71.为了在高度操作敏感的系统中原则上不必总是等待反应(其随后导致干扰反应),仅在系统中可能有空气并且关停可及时进行时,才可激活观察。例如在长时间静止后,当传动装置在静止期间强烈冷却时,或在油严重起泡的运行状态中,会出现这种情况。
72.附图标记列表
73.dk
ꢀꢀꢀ
双离合器
74.em
ꢀꢀꢀ
电动机
75.g
ꢀꢀꢀꢀ
梯度
76.g(t) 梯度的时间曲线
77.k0
ꢀꢀꢀ
离合器
78.k1
ꢀꢀꢀ
双离合器的第一离合器
79.k2
ꢀꢀꢀ
双离合器的第二离合器
80.p
ꢀꢀꢀꢀ
压力
81.p0
ꢀꢀꢀ
压力值
82.p11
ꢀꢀ
压力值
83.p12
ꢀꢀ
压力值
84.p13
ꢀꢀ
压力值
85.p14
ꢀꢀ
压力值
86.p22
ꢀꢀ
压力值
87.p23
ꢀꢀ
压力值
88.p24
ꢀꢀ
压力值
89.p32
ꢀꢀ
压力值
90.p33
ꢀꢀ
压力值
91.p34
ꢀꢀ
压力值
92.p42
ꢀꢀ
压力值
93.p43
ꢀꢀ
压力值
94.p44
ꢀꢀ
压力值
95.p45
ꢀꢀ
压力值
96.p52
ꢀꢀ
压力值
97.p53
ꢀꢀ
压力值
98.p54
ꢀꢀ
压力值
99.p55
ꢀꢀ
压力值
100.p62
ꢀꢀ
压力值
101.p63
ꢀꢀ
压力值
102.p64
ꢀꢀ
压力值
103.p65
ꢀꢀ
压力值
104.pc
ꢀꢀꢀ
压力值
105.pl1
ꢀꢀ
实际压力曲线
106.pl2
ꢀꢀ
实际压力曲线
107.pl3
ꢀꢀ
实际压力曲线
108.pl4
ꢀꢀ
实际压力曲线
109.pl5
ꢀꢀ
实际压力曲线
110.pl6
ꢀꢀ
实际压力曲线
111.ps1
ꢀꢀ
目标压力曲线
112.ps2
ꢀꢀ
目标压力曲线
113.ps3
ꢀꢀ
目标压力曲线
114.ps4
ꢀꢀ
目标压力曲线
115.ps5
ꢀꢀ
目标压力曲线
116.ps6
ꢀꢀ
目标压力曲线
117.s
ꢀꢀꢀꢀ
信号
118.s(t) 信号的时间曲线
119.t
ꢀꢀꢀꢀ
时间
120.t0
ꢀꢀꢀ
时间点
121.t1
ꢀꢀꢀ
时间点
122.t11
ꢀꢀ
时间点
123.t12
ꢀꢀ
时间点
124.t22
ꢀꢀ
时间点
125.t32
ꢀꢀ
时间点
126.t41
ꢀꢀ
时间点
127.t42
ꢀꢀ
时间点
128.t51
ꢀꢀ
时间点
129.t52
ꢀꢀ
时间点
130.t61
ꢀꢀ
时间点
131.t62
ꢀꢀ
时间点
132.t63
ꢀꢀ
时间点
133.t64
ꢀꢀ
时间点
134.tc
ꢀꢀꢀ
时间点
135.tc2
ꢀꢀ
时间点
136.tc3
ꢀꢀ
时间点
137.tc4
ꢀꢀ
时间点
138.tc5
ꢀꢀ
时间点
139.tc8
ꢀꢀ
时间点
140.δt1 时间差
141.δt2 时间差
142.δt3 时间差
143.δt4 时间差
144.δt5 时间差
145.vkm
ꢀꢀ
内燃机
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1