基于八极轴向绕组式磁流变阻尼器的隔振系统及控制方法与流程
1.本发明涉及一种智能材料与振动控制技术,尤其是一种变阻尼隔振系统,具体地说是利用磁流变阻尼器的磁流变效应与模糊算法来对隔振系统的阻尼进行实时控制,达到最优隔振效果。
背景技术:
2.为了抑制共振区的振动,在保持刚度不变的情况下需要增大隔振系统的阻尼比,但是这会降低高频激励时的隔振效率。一般在工程上采取折中方案,即选择一个较为适中的阻尼比来尽量满足隔振要求。但是复杂环境下的设备面临的外部激励频率范围广,原有的被动隔振系统已逐渐不再适应更宽的工作频带,因此迫切地希望能开发出变阻尼隔振系统,能根据激振源频率的不同来做出相应改变,从而改善隔振性能。
3.磁流变液是一种磁控智能材料,其黏度受磁场强度的控制。在外加磁场作用下,磁流变液会转变为具有一定屈服应力的类固体;一旦撤去磁场,磁流变液会迅速恢复原状,重新变为流动性能良好的牛顿流体。这种变化的响应时间极短,为毫秒级并且可逆。磁流变阻尼器是一种内部流体介质采用磁流变液的阻尼可控元件,当磁流变阻尼器励磁线圈电流发生改变时,其激发的磁场亦会发生相应改变,进而影响阻尼通道磁流变液的流变特性改变阻尼力的大小,但传统的磁流变阻尼器普遍存在可调节范围低的问题。
4.轴向绕组式磁流变阻尼器的磁场沿着阻尼器的轴向连续分布,相较于传统磁流变阻尼器能在有限的轴向空间内产生更大的阻尼力,提高阻尼力的可调范围。八极绕组可对阻尼力进行分段控制,将磁流变阻尼器的工作模式分为四种,可提高阻尼力的控制精度。
5.传统控制算法依赖被控对象的准确建模,但磁流变阻尼器具有非线性、强耦合和滞回的特点,其数学模型难以被建立,模糊算法不依赖被控对象的精确数学模型,对非线性和时变性系统具有较强的动态性和鲁棒性的特点,控制方法简单且具有较强的适应能力。
技术实现要素:
6.本发明的目的在于提供一种阻尼力调节范围大、控制精度高的基于八极轴向绕组式磁流变阻尼器的隔振系统及控制方法。
7.为实现上述目的,本发明的技术方案是:一种基于八极轴向绕组式磁流变阻尼器的隔振系统,包括:
8.八极轴向绕组式磁流变阻尼器,安装在隔振平台的底部基座与支撑平台之间,并与控制器连接,由控制器控制通电个数对阻尼器的出力进行精确的控制;
9.隔振平台,底部基座和支撑平台之间通过弹簧导向保持器、弹簧连相连接,底部基座和支撑平台上分别装有加速度传感器;
10.控制系统,连接两个加速度传感器,并通过固态继电器11连接极轴向绕组式磁流变阻尼器,用于控制固态继电器来改变八极轴向绕组式磁流变阻尼器磁极通电个数,以切换八极轴向绕组式磁流变阻尼器的工作模式;并根据激振频率与加速度传递率完成对八极
轴向绕组式磁流变阻尼器的实时控制,从而实现隔振系统的变阻尼控制。
11.进一步,所述八极轴向绕组式磁流变阻尼器中的八极轴向绕组采用励磁线圈沿着轴向缠绕在缸体的八个磁极上,相邻磁极线圈的缠绕方向相反,单个励磁线圈所激发的磁场由本磁极经缸体传递至两个相邻的磁极之中,经磁流变液传递至活塞环,再由活塞环经磁流变液回到本磁极中形成完整的磁路。
12.进一步,所述八极轴向绕组式磁流变阻尼器包括上端盖、缸体、下端盖、活塞环、活塞杆、挡圈、密封圈、密封条、磁流变液、励磁线圈和螺纹紧固件,所述上端盖与缸体之间通过螺栓连接,下端盖与缸体之间通过螺钉连接,所述活塞环通过挡圈与螺钉固定在活塞杆之上,所述密封圈安装在上、下端盖的凹槽之中,与活塞杆组成动密封,与缸体组成静密封;所述密封条通过密封胶固定在缸体的八个磁极之间的间隙中;所述磁流变液封闭在由缸体、密封条、上端盖、下端盖和密封圈组成的密闭空间里;所述励磁线圈缠绕在缸体的八个磁极之上,励磁线圈通过下端盖的开孔处引出用以施加电流。
13.进一步,所述控制系统包括数据采集卡、控制器、程控电源和固态继电器,两个加速度传感器分别通过螺纹固定在底部基座与支撑平台上,分别测量减振前、后的加速度信号,所述数据采集卡安装在控制器的主板上,测量加速度传感器的信号并通过主板总线传输给控制器,所述控制器识别加速度传感器的信号通过模糊算法计算得到电流信号与工作模式,控制器通过将电流信号传输给程控电源来对阻尼器励磁线圈施加电流,控制器切换工作模式是通过控制固态继电器得电闭合的个数来改变磁极通电个数。
14.进一步,所述隔振平台包括弹簧导向保持器、弹簧、底部基座、支撑平台、连接杆和螺纹紧固件。所述弹簧导向保持器通过螺纹与底部基座连接,弹簧与底部基座和支撑平台固连在一起,所述连接杆通过螺纹与阻尼器的活塞杆连接,连接杆与支撑平台通过螺纹紧固件连接。
15.一种采用基于八极轴向绕组式磁流变阻尼器的隔振系统的变阻尼控制方法,控制器根据加速度传感器信号识别出外部激励的激振频率与加速度传递率作为模糊算法的输入,库仑阻尼力作为模糊算法的输出,经过计算输出电流信号与工作模式,完成对磁流变阻尼器励磁电流大小与励磁线圈通电个数的控制。
16.本发明的有益效果在于:
17.传统磁流变阻尼器的阻尼力可调范围一般在10以内,个别的阻尼器可调范围能达到20,但轴向长度太大。使用本发明的八极缸体轴向绕组式的磁流变阻尼器的隔振系统,其可调倍数可达33以上且具有更短的轴向长度,可用于在轴向长度受限但又需要较大阻尼力的隔振领域。
18.磁流变阻尼器在实际使用时一个微小的电流扰动就会导致阻尼器出力有较大变化,这在控制上是不利的。得益于该八极缸体轴向绕组式阻尼器的特殊结构,可以根据该阻尼器磁极的通电个数对阻尼器的出力进行更为精确的控制。
附图说明
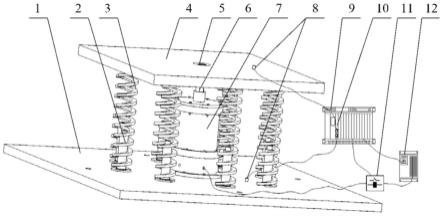
19.图1为本发明的整体结构图;
20.图2为基于八极轴向绕组式磁流变阻尼器的隔振系统工作原理图;
21.图3为八极轴向绕组式磁流变阻尼器控制原理图;
22.图4为八极轴向绕组式磁流变阻尼器磁路示意图;
23.图5为八极轴向绕组式磁流变阻尼器结构纵剖视图;
24.图6为八极轴向绕组式磁流变阻尼器结构横剖视图。
具体实施方式
25.下面结合附图举例对本发明做更详细地描述:
26.如图1所示,本发明和基于八极轴向绕组式磁流变阻尼器的隔振系统整体结构,主要由八极轴向绕组式磁流变阻尼器7、控制系统和隔振平台组成。
27.隔振平台包括弹簧导向保持器2、弹簧3、底部基座1、支撑平台4、连接杆6和螺纹紧固件。弹簧导向保持器2通过螺纹与底部基座1连接,弹簧3与底部基座1和支撑平台4固连在一起,因弹簧3的内孔穿过弹簧导向保持器2故只能沿着竖直方向产生拉伸与压缩。连接杆6通过螺纹与阻尼器7的活塞杆连接,连接杆6与支撑平台4通过螺纹紧固件5连接。无论外部激励是从底部基座1传向支撑平台4,还是从支撑平台4传向底部基座1,本隔振系统都能有效地工作。
28.控制系统包括加速度传感器8、数据采集卡、控制器、程控电源和固态继电器。加速度传感器i、ii通过螺纹固定在底部基座1与支撑平台4上,分别测量减振前、后的加速度信号。数据采集卡安装在控制器9的主板上,测量加速度传感器的信号并通过主板总线传输给控制器9。控制器9识别加速度传感器的信号通过模糊算法计算得到电流信号与工作模式,控制器通过将电流信号传输给程控电源来对阻尼器励磁线圈施加电流,控制器切换工作模式是通过控制固态继电器得电闭合的个数来改变磁极通电个数。
29.八极轴向绕组式磁流变阻尼器7的结构,如图5,6所示,包括上端盖79、缸体74、下端盖71、活塞环82、活塞杆78、挡圈76、密封圈80、密封条81、磁流变液84、励磁线圈77和螺纹紧固件72、75、83。上端盖79与缸体74之间通过螺栓75连接,下端盖71与缸体74之间通过螺钉72连接。所述活塞环82通过挡圈76与螺钉83固定在活塞杆78之上。所述密封圈80安装在上、下端79、71的凹槽之中,与活塞杆78组成动密封,与缸体74组成静密封。所述密封条81通过密封胶固定在缸体74的八个磁极之间的间隙中。所述磁流变液84封闭在由缸体74、密封条81、上端盖79、下端盖71和密封圈80组成的密闭空间里。所述励磁线圈77缠绕在缸体74的八个磁极之上,励磁线圈77通过下端盖71的开孔处引出用以施加电流。
30.基于八极轴向绕组式磁流变阻尼器的隔振系统工作原理图如图2所示,当外部激励是从底部基座1传向支撑平台4时,加速度传感器8(i)测量减振前的加速度传感器信号,加速度传感器ii测量减振后的加速度传感器信号。加速度传感器的信号由数据采集卡10测得,通过a/d转换将传感器的模拟量转换成数字量并通过主板总线传输给控制器9。
31.控制器9的软件对加速度传感器i的信号进行傅里叶变化(fft),识别出外部激励的激振频率。控制器9的软件通过对加速度传感器i、ii的信号幅值进行对比,得到加速度传递率。
32.控制器9的软件将外部激励的激振频率与加速度传递率作为模糊算法的输入,将库仑阻尼力作为模糊算法的输出,再根据库仑阻尼力的大小实时计算出此时磁流变阻尼器7需要的工作模式与励磁电流的大小。励磁电流以通信的方式由控制器9传输给程控电源12,再由程控电源12提供给磁流变阻尼器7励磁线圈的引出线,实时改变磁流变阻尼器7的
励磁电流,完成数字量向模拟量转换(d/a)。控制器9通过控制固态继电器11得电闭合的个数来改变磁流变阻尼器7磁极通电个数,用以切换磁流变阻尼器的工作模式。至此,控制器9根据激振频率与加速度传递率完成对磁流变阻尼器的实时控制,进而实现隔振系统的变阻尼控制,达到最优隔振效果。
33.将磁流变阻尼器分为四种工作模式进行分段控制,可避免一个微小的电流扰动就会导致阻尼器出力有较大变化,能提高阻尼力的控制精度。当控制器9计算得到库仑阻尼力的大小时,由其判断磁流变阻尼器应处于何种工作模式并输出多大的励磁电流。
34.八极轴向绕组式磁流变阻尼器控制原理图与磁路,如图3、图4所示。当固态继电器11(kv1)得电时,磁流变阻尼器7励磁线圈(coil 1、coil 2)通电,此为磁流变阻尼器的一级模式;当固态继电器11(kv1、kv2)得电时,磁流变阻尼器7励磁线圈(coil 1、coil 2、coil 3、coil 4)通电,此为磁流变阻尼器的二级模式;当固态继电器11(kv1、kv2、kv3)得电时,磁流变阻尼器7励磁线圈(coil 1、coil 2、coil 3、coil 4、coil 5、coil 6)通电,此为磁流变阻尼器的三级模式;当固态继电器11(kv1、kv2、kv3、kv4)得电时,磁流变阻尼器7励磁线圈(coil 1、coil 2、coil 3、coil 4、coil 5、coil 6、coil 7、coil 8)通电,此为磁流变阻尼器的四级模式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1