一种双速行星减速机及具有该双速行星减速机的电动伺服系统的制作方法
本技术涉及伺服系统,尤其是涉及一种双速行星减速机及具有该双速行星减速机的电动伺服系统。
背景技术:
1、行星减速机(planetary reducer)又名伺服行星减速机或者行星齿轮减速机,是因其传动结构而得名的。行星减速机是一种用途广泛的工业产品,可以降低电机的转速,同时增大输出转矩。行星减速机可作为配套部件用于起重、挖掘、运输、建筑等行业。行星减速机主要传动结构为:行星轮,太阳轮,外齿圈。 行星式减速机的单级减速比最小为3 ,最大为10 ,常见减速比为3、4、5、7、10。减速机级数通常有单级、双级、三级,但是有部分大减速比的可达到四级。
2、目前,国内小型电动伺服系统中的行星减速机一般使用单速传动,少部分采用变速结构的电动伺服系统中通常需要手动变速,变速必须在静止状态下才能进行,且还需要齿轮对齐才能实现,这样会造成齿轮间隙大。
3、而在无人机舵机等领域,在调整输出轴的角度时,需要在空载条件下尽快调整到位,正常负载工作时调到低速档,采用上述相关技术中的结构就会非常不便。
技术实现思路
1、为了精准快速的实现电动伺服系统的双速调节,本技术提供一种双速行星减速机及具有该双速行星减速机的电动伺服系统。
2、第一方面,本技术提供的一种双速行星减速机采用如下的技术方案:
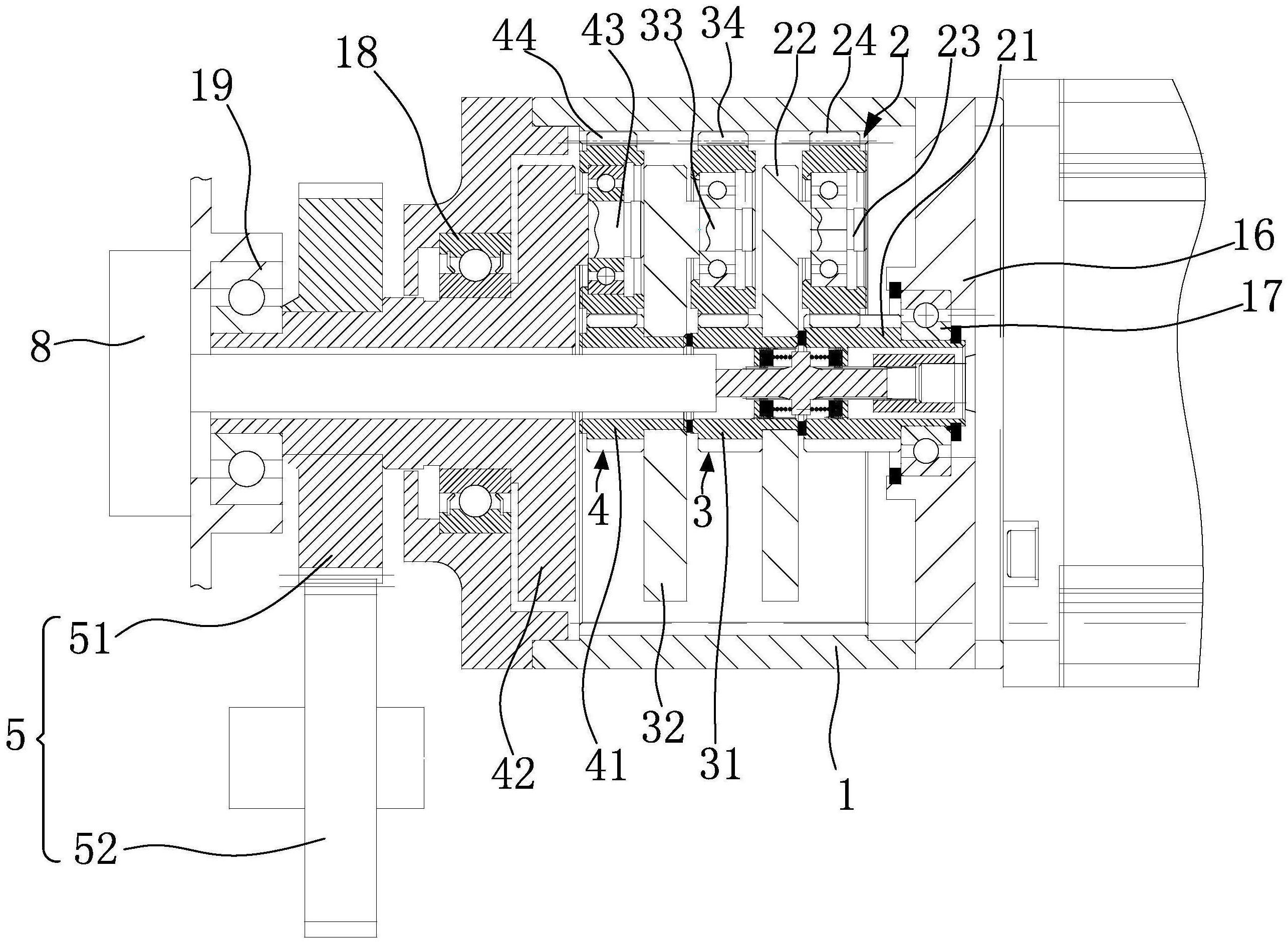
3、一种双速行星减速机,包括箱体,所述箱体内设置有一级行星减速齿轮结构和二级行星减速齿轮结构,所述二级行星减速齿轮结构的输出端连接有输出齿轮结构;所述一级行星减速齿轮结构包括空心的一级太阳轮,所述二级行星减速齿轮结构包括空心的二级太阳轮,所述一级太阳轮和二级太阳轮同轴设置且所述一级太阳轮和二级太阳轮内滑动插设有驱动杆;
4、所述驱动杆的一端设有用于与电机的输出轴相连接的联轴器,所述驱动杆与所述联轴器轴向滑动、周向限位连接,所述驱动杆的另一端设置有用于驱动所述驱动杆在所述一级太阳轮和二级太阳轮内沿驱动杆自身轴线方向移动的驱动件;
5、所述驱动杆与所述一级太阳轮之间设置有使两者相离合的第一摩擦组件,所述驱动杆与所述二级太阳轮之间设置有使两者相离合的第二摩擦组件,所述驱动件带动驱动杆轴向移动时能够择一使得所述第一摩擦组件结合或者所述第二摩擦组件结合。
6、本技术中的行星减速机至少设置有两级减速,通过采用上述技术方案,驱动杆与电机的输出轴周向固连,电机的输出轴能够带动驱动杆周向转动,驱动件带动驱动杆轴向移动,当驱动杆朝向一级行星减速齿轮结构一侧方向移动时,驱动杆能够使第一摩擦组件结合,此时第二摩擦组件分离,驱动杆通过第一摩擦组件与一级太阳轮之间实现扭矩传动,一级行星减速齿轮结构再向二级行星减速齿轮结构传动力矩,实现多级减速,进而使电动伺服系统实现低速大扭矩运行;当驱动杆朝向二级行星减速齿轮结构一侧方向移动时,驱动杆能够使第二摩擦组件结合,此时第一摩擦组件分离,驱动杆通过第二摩擦组件与二级太阳轮之间实现扭矩传动,二级行星减速齿轮结构向后传动力矩,最终通过输出齿轮结构将力矩输出,此过程中一级行星减速齿轮结构空转,不参与减速功能,实现高速小扭矩运行。
7、本技术中通过驱动件、驱动杆、第一摩擦组件、第二摩擦组件高效精准的实现了双速行星减速机输出两种不同的速度,即低速重载和高速轻载两种工况下的使用;比如需要调整无人机舵机输出轴位置时,可以使用高速轻载工况,工作时可以使用低速重载工况。
8、可选的,所述第一摩擦组件包括所述一级太阳轮内通过花键孔设置的第一外摩擦片以及所述驱动杆上设置的与所述第一外摩擦片相对应的第一内摩擦片;所述第二摩擦组件包括所述二级太阳轮内通过花键孔设置的第二外摩擦片以及所述驱动杆上设置的与所述第二外摩擦片相对应的第二内摩擦片;所述驱动杆轴向移动时能够使第一外摩擦片与第一内摩擦片相贴靠或者所述第二外摩擦片与第二内摩擦片相贴靠。
9、通过采用上述技术方案,第一外摩擦片与第一内摩擦片相贴靠在一起时,能够使第一摩擦组件形成结合状态,此时第二外摩擦片与第二内摩擦片相分离,一级行星减速齿轮结构参与到减速机的减速中,进而使电动伺服系统实现低速大扭矩运行;第二外摩擦片与第二内摩擦片相贴靠在一起时,能够使第二摩擦组件形成结合状态,此时第一外摩擦片与第一内摩擦片相分离,一级行星减速齿轮结构不参与到减速机的减速中,进而使电动伺服系统实现高速低扭矩输出。
10、可选的,所述第一外摩擦片有若干个且间隔设置在所述一级太阳轮的内壁上,所述第一内摩擦片也有若干个且间隔设置在所述驱动杆的外周面上,若干个所述第一外摩擦片与若干个所述第一内摩擦片依次交替设置;所述第二外摩擦片有若干个且间隔设置在所述二级太阳轮的内壁上,所述第二内摩擦片也有若干个且间隔设置在所述驱动杆的外周面上,若干个所述第二外摩擦片与若干个所述第二内摩擦片依次交替设置。
11、通过采用上述技术方案,设置若干个第一外摩擦片与若干个第一内摩擦片依次交替设置,若干个第二外摩擦片与若干个第二内摩擦片依次交替设置;这样在第一摩擦组件和第二摩擦组件贴靠结合时,力矩传递更加稳定可靠。
12、可选的,所述驱动件为电动推杆,所述驱动杆为浮动花键轴,所述驱动杆固连在所述电动推杆的输出轴上或者所述驱动杆为所述电动推杆的输出轴的一部分;所述驱动杆的一端滑动插设在所述联轴器内且两者之间通过花键周向限位连接。
13、通过采用上述技术方案,电动推杆驱动浮动花键轴来实现调速,可以在运动中切换速度,控制精准可靠,且方便实现远程控制。
14、可选的,所述驱动杆的中部具有环形台阶,所述环形台阶的一侧与所述第一摩擦组件之间设置有第一压簧和第一压板,所述第一压板的一侧侧面与最靠近所述环形台阶的第一外摩擦片侧面相贴合,所述第一压簧的两端分别抵靠在所述第一压板的另一侧侧面以及所述环形台阶的侧面上;
15、所述环形台阶的另一侧与所述第二摩擦组件之间设置有第二压簧和第二压板,所述第二压板的一侧侧面与最靠近所述环形台阶的第二外摩擦片侧面相贴合,所述第二压簧的两端分别抵靠在所述第二压板的另一侧侧面以及所述环形台阶的侧面上。
16、通过采用上述技术方案,驱动轴移动时,通过第一压簧、第一压板、第二压簧、第二压板来实现第一摩擦组件和第二摩擦组件的贴靠结合,更加稳定可靠。
17、可选的,所述二级行星减速齿轮结构与所述输出齿轮结构之间还设有三级行星减速齿轮结构,所述三级行星减速齿轮结构包括空心的三级太阳轮,所述三级太阳轮与所述一级太阳轮以及二级太阳轮同轴设置,所述一级太阳轮与二级太阳轮之间、所述二级太阳轮之间与三级太阳轮之间均设置有推力滚针轴承或动摩擦片。
18、通过采用上述技术方案,本技术中的行星减速机可以实现三级减速。
19、可选的,所述箱体内分别间隔设置有一级内齿圈、二级内齿圈和三级内齿圈,所述一级行星减速齿轮结构还包括与所述二级太阳轮固连的一级行星架,所述一级行星架内转动设置有若干个与所述一级内齿圈相啮合的一级行星齿轮且所述一级太阳轮同时与若干个所述一级行星齿轮相啮合;
20、所述二级行星减速齿轮结构还包括与所述三级太阳轮固连的二级行星架,所述二级行星架内转动设置有若干个与所述二级内齿圈相啮合的二级行星齿轮且所述二级太阳轮同时与若干个所述二级行星齿轮相啮合;
21、所述三级行星减速齿轮结构还包括三级行星架,所述三级行星架内转动设置有若干个与所述三级内齿圈相啮合的三级行星齿轮且所述三级太阳轮同时与若干个所述三级行星齿轮相啮合;
22、所述三级行星架的一端伸出所述箱体外,所述输出齿轮结构包括与所述三级行星架的端部固连的输出小齿轮以及与所述输出小齿轮相啮合的输出大齿轮。
23、通过采用上述技术方案,当电机运转时,带动联轴器旋转,进而带动浮动花键轴旋转,第一外摩擦片和第一内摩擦片贴靠压紧时,带动一级太阳轮旋转,此时第二外摩擦片和第二内摩擦片之间具有间隙,两者分离,浮动花键轴的运动不会带动二级太阳轮旋转,一级太阳轮驱动一级行星轮旋转,一级行星轮安装在一级行星架上,并且与固定的一级内齿圈啮合,从而驱使一级行星架旋转,一级行星架带动二级太阳轮旋转;二级太阳轮带动安装在二级行星架上的二级行星轮转动,二级行星轮和二级内齿圈啮合,驱使二级行星架旋转,二级行星架带动三级太阳轮旋转;三级太阳轮带动安装在三级行星架上的三级行星轮转动,驱使三级行星架旋转。三级行星架上的输出小齿轮驱动输出大齿轮转动,从而输出负载。这样电机输出扭矩经过三级行星减速和一级平行轴减速,实现低速大扭矩输出。
24、可选的,所述箱体的一端端部中心位置设置有轴承座,所述轴承座朝向所述箱体的内侧,所述轴承座内设置有支撑轴承,所述一级太阳轮的中心轴一端插设在所述支撑轴承内。
25、通过采用上述技术方案,一级太阳轮稳定可靠的支撑在箱体的端部,保证了力矩传递的稳定可靠性,且整个结构紧凑,体积小。
26、可选的,所述箱体的另一端端部与所述三级行星架之间通过第一轴承转动连接,所述驱动件通过第二轴承转动连接在所述三级行星架的端部,所述驱动件的输出轴穿过所述三级行星架伸入到所述三级太阳轮中。
27、通过采用上述技术方案,驱动件和电机分别设置在箱体的两端,整个结构紧凑,大大减小了整个电动伺服系统的体积,且双速行星减速机内部的齿轮位于封闭的空间里,减少灰尘等异物的干扰,力矩传递更加稳定。
28、第二方面,本技术提供的一种具有双速行星减速机的电动伺服系统采用如下的技术方案:
29、一种具有双速行星减速机的电动伺服系统,所述电动伺服系统具有上述的双速行星减速机。
30、通过采用上述技术方案,本技术中的电动伺服系统可以运用在无人机舵机等领域,在调整无人机舵机输出轴的角度时,满足空载条件下尽快调整到位,正常负载工作时调到低速档的要求,且可以无线控制,动作精准可靠。
31、综上所述,本技术包括以下至少一种有益技术效果:
32、1.本技术中的双速行星减速机通过驱动件、驱动杆、第一摩擦组件、第二摩擦组件高效精准的实现了双速行星减速机输出两种不同的速度,即低速重载和高速轻载两种工况下的使用。
33、2.本技术中通过电动推杆驱动浮动花键轴来实现调速,可以在运动中切换速度,且方便实现远程控制。
34、3.本技术中采用第一摩擦组件、第二摩擦组件的摩擦传动力矩,不需要变速齿轮切换过程中的齿轮对齐要求,也不易对齿轮产生损坏。
- 还没有人留言评论。精彩留言会获得点赞!