一种管道检测机器人的制作方法
本发明涉及管道修复设备,具体涉及一种管道检测机器人。
背景技术:
1、管道修复过程中,需要在排空管道之后,先对管道内部的破损情况进行检测,之后再对出现破碎的部分进行修复。而对于大型的管道,由于其内部具有足够的人员进出的空间,一般可在管道排空之后人员进入其内部进行检测。而对于一些内径较小的管道,由于人员无法进入,手持类的检测设备延伸长度有限,因此,现如今广泛采用带有车体的管道检测机器人进入管道内部之后对管道进行拍摄,并实时将管道内部情况通过线缆回传至显示设备上。
2、目前的管道检测机器人其主要的研究方向在于拍摄的清晰度及各种检测性能的优化,而对线缆拖拽的现象缺乏有效的改进,导致管道检测机器人在管道内部行走时,线缆普遍呈拖地状态,极易磨损线缆及受到管道内残留的障碍物的影响导致管道检测机器人无法正常在管道内行走或导致线缆与车体上的线缆快接头之间脱离。因此,本申请提供了一种管道检测机器人。
技术实现思路
1、为解决上述技术问题,本发明提出一种管道检测机器人。
2、本发明的技术方案是这样实现的:
3、一种管道检测机器人,包括车体、摄像头、补光灯及设置在车体尾部的线缆快接头,所述车体上设置有依次转动配合的第一支架、第二支架、第三支架和第四支架,所述第四支架相对于第一支架的一端固定在车体的尾部,所述第一支架相对于第四支架的一端通过转动体转动安装在车体上,所述第一支架相对于第二支架的一端上安装有第一引导轮、第二支架相对于第三支架的一端安装有第二引导轮,第四支架相对于第三支架的一端安装有第三引导轮,所述线缆自线缆快接头依次经过第三引导轮和第四引导轮的外侧面后从第一引导轮的底部绕至其顶部后向后延伸,且所述车体上设置有用于驱动转动体转动的动力装置。
4、进一步地,第一支架、第三支架和第四支架均设置成“”形结构,且第一支架的两个端部均连接在转动体上,第四支架的两个端部均固定连接在车体上。
5、进一步地,所述第一支架两侧的杆体部上均转动套设有第一套管,所述第一支架中部的杆体部上转动套设有第二套管,第一套管的相对于第四支架的一端传动连接有第一锥齿轮副,所述第一套管的相对于第二支架的一端与第二套管之间通过第二锥齿轮副传动连接,第一锥齿轮副的其中一个锥齿轮固定设置在车体上并与所述第一支架的相对于第四支架的一端的转动轴心同轴设置,第一引导轮固定套设在第二套管上,且第一支架向上摆动时,所述第一引导轮将线缆向第二引导轮输送。
6、进一步地,所述第一引导轮包括轮轴、固定设置在轮轴两端的轮板及设置在轮板内沿圆周方向等距分布的夹块,其中,所述夹块通过设置成可在轮板轴向位移使得两个轮板上呈对称分布的两个夹块具有夹持状态和松开状态,且夹块在线缆进入及离开第一引导轮的位置呈松开状态,夹块在线缆进入及离开第一引导轮的两个位置之间的位置呈夹持状态。
7、进一步地,所述轮板内表面设置有用于收纳夹块的收纳槽,所述夹块的外表面固定设置有从收纳槽内穿出轮板的导杆,导杆的外侧端与轮板的外表面之间设置有用于为夹块收纳于收纳槽内提供弹性力的弹簧,且第一引导轮轴向的两侧均设置有用于驱动夹块从松开状态切换至夹持状态的环形导板,且所述导杆的外侧端在环形导板上位移。
8、进一步地,所述环形导板的内表面包括与夹块呈松开状态对应的第一导向面及设置在第一导向面的两端之间与夹块呈夹持状态对应的第二导向面,且第二导向面在轴向位于第一导向面的内侧,夹块的外侧端通过从第一导向面运动至第二导向面上从松开状态切换至夹持状态。
9、进一步地,所述第一支架中部的杆状部及第二套管呈贯穿环形导板内圈的状态,所述环形导板固定安装在第二支架上,且所述导杆的外侧端设置有滚珠。
10、进一步地,所述转动体设置成环形结构,其转动安装在车体上,所述转动体的圆周面上固定设置有连接杆,且所述第一支架的端部固定连接在连接杆上,所述第一锥齿轮副中安装在车体上的锥齿轮通过轴杆固定连接车体,且轴杆的内侧端贯穿转动体的内圈后固定在车体上,所述转动体转动套设在轴杆上。
11、进一步地,所述第一支架、第二支架、第三支架和第四支架整体呈平行四边形结构,且所述第二支架始终呈水平状态,所述第二支架的顶部设置有用于支撑在管道顶部的限位轮,所述第二支架包括两个在限位轮轴向呈相对分布的架体,线缆自两个架体之间穿过并位于限位轮下方。
12、进一步地,所述架体包括内杆及套设在内杆外的外杆,限位轮安装在内杆上,内杆贯穿在外杆上,外管固定设置在第二支架上,所述内杆的底端穿过外杆后固定连接钢丝绳的一端,钢丝绳的另一端依次贯穿第二支架和第一支架并延伸至转动体内,且转动体内设置有可沿第一支架轴向位移的卡块,钢丝绳的上述另一端连接在卡块上,且车体上固定设置有与卡齿轮,且卡块设置成沿第一支架的轴向朝第一支架位移可与卡齿轮卡接。
13、本发明具有如下有益效果:
14、1、通过设置第一支架、第二支架、第三支架和第四支架整体将线缆撑起,可防止线缆拖地,更好的保护线缆,同时,能够防止线缆在受到障碍物阻挡时影响到管道检测机器人在管道内的行走性能。
15、2、通过在第一限位轮上设置具有松开状态和夹持状态的夹块,并设置第一锥齿轮副和第二锥齿轮副驱动第一限位轮转动,使得第一支架、第二支架、第三支架和第四支架整体从折叠状态切换至展开状态以撑起线缆离地的过程中,第一限位轮能够将线缆向车体抽动,可防止拉拽线缆。
技术特征:
1.一种管道检测机器人,包括车体(1)、摄像头(2)、补光灯(3)及设置在车体(1)尾部的线缆快接头(4),其特征在于,所述车体(1)上设置有依次转动配合的第一支架(5)、第二支架(6)、第三支架(7)和第四支架(8),所述第四支架(8)相对于第一支架(5)的一端固定在车体(1)的尾部,所述第一支架(5)相对于第四支架(8)的一端通过转动体(9)转动安装在车体(1)上,所述第一支架(5)相对于第二支架(6)的一端上安装有第一引导轮(10)、第二支架(6)相对于第三支架(7)的一端安装有第二引导轮(11),第四支架(8)相对于第三支架(7)的一端安装有第三引导轮(12),所述线缆自线缆快接头(4)依次经过第三引导轮(12)和第四引导轮的外侧面后从第一引导轮(10)的底部绕至其顶部后向后延伸,且所述车体(1)上设置有用于驱动转动体(9)转动的动力装置(13)。
2.根据权利要求1所述的管道检测机器人,其特征在于,所述第一支架(5)、第三支架(7)和第四支架(8)均设置成“u”形结构,且第一支架(5)的两个端部均连接在转动体(9)上,第四支架(8)的两个端部均固定连接在车体(1)上。
3.根据权利要求1所述的管道检测机器人,其特征在于,所述第一支架(5)两侧的杆体部上均转动套设有第一套管(14),所述第一支架(5)中部的杆体部上转动套设有第二套管(15),第一套管(14)的相对于第四支架(8)的一端传动连接有第一锥齿轮副(16),所述第一套管(14)的相对于第二支架(6)的一端与第二套管(15)之间通过第二锥齿轮副(17)传动连接,第一锥齿轮副(16)的其中一个锥齿轮固定设置在车体(1)上并与所述第一支架(5)的相对于第四支架(8)的一端的转动轴心同轴设置,第一引导轮(10)固定套设在第二套管(15)上,且第一支架(5)向上摆动时,所述第一引导轮(10)将线缆向第二引导轮(11)输送。
4.根据权利要求3所述的管道检测机器人,其特征在于,所述第一引导轮(10)包括轮轴(10-1)、固定设置在轮轴(10-1)两端的轮板(10-2)及设置在轮板(10-2)内沿圆周方向等距分布的夹块(10-3),其中,所述夹块(10-3)通过设置成可在轮板(10-2)轴向位移使得两个轮板(10-2)上呈对称分布的两个夹块(10-3)具有夹持状态和松开状态,且夹块(10-3)在线缆进入及离开第一引导轮(10)的位置呈松开状态,夹块(10-3)在线缆进入及离开第一引导轮(10)的两个位置之间的位置呈夹持状态。
5.根据权利要求4所述的管道检测机器人,其特征在于,所述轮板(10-2)内表面设置有用于收纳夹块(10-3)的收纳槽(10-4),所述夹块(10-3)的外表面固定设置有从收纳槽(10-4)内穿出轮板(10-2)的导杆(10-5),导杆(10-5)的外侧端与轮板(10-2)的外表面之间设置有用于为夹块(10-3)收纳于收纳槽(10-4)内提供弹性力的弹簧(10-6),且第一引导轮(10)轴向的两侧均设置有用于驱动夹块(10-3)从松开状态切换至夹持状态的环形导板(18),且所述导杆(10-5)的外侧端在环形导板(18)上位移。
6.根据权利要求5所述的管道检测机器人,其特征在于,所述环形导板(18)的内表面包括与夹块(10-3)呈松开状态对应的第一导向面(18-1)及设置在第一导向面(18-1)的两端之间与夹块(10-3)呈夹持状态对应的第二导向面(18-2),且第二导向面(18-2)在轴向位于第一导向面(18-1)的内侧,夹块(10-3)的外侧端通过从第一导向面(18-1)运动至第二导向面(18-2)上从松开状态切换至夹持状态。
7.根据权利要求6所述的管道检测机器人,其特征在于,所述第一支架(5)中部的杆状部及第二套管(15)呈贯穿环形导板(18)内圈的状态,环形导板(18)固定安装在第二支架(6)上,且所述导杆(10-5)的外侧端设置有滚珠(10-7)。
8.根据权利要求3所述的管道检测机器人,其特征在于,所述转动体(9)设置成环形结构,其转动安装在车体(1)上,所述转动体(9)的圆周面上固定设置有连接杆(19),且所述第一支架(5)的端部固定连接在连接杆(19)上,所述第一锥齿轮副(16)中安装在车体(1)上的锥齿轮通过轴杆(20)固定连接车体(1),且轴杆(20)的内侧端贯穿转动体(9)的内圈后固定在车体(1)上,所述转动体(9)转动套设在轴杆(20)上。
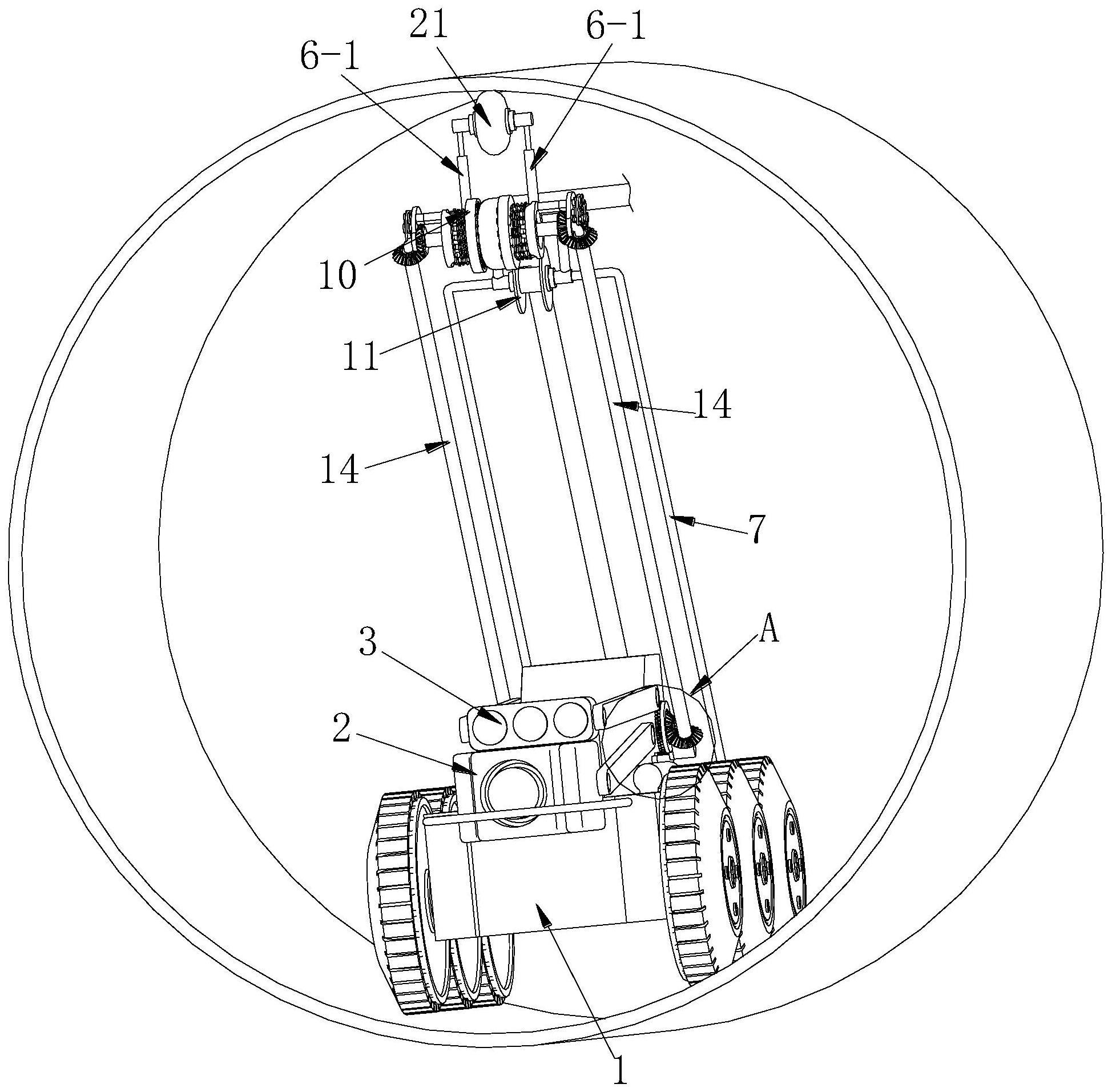
9.根据权利要求1至8任一项所述的管道检测机器人,其特征在于,所述第一支架(5)、第二支架(6)、第三支架(7)和第四支架(8)整体呈平行四边形结构,且所述第二支架(6)始终呈水平状态,所述第二支架(6)的顶部设置有用于支撑在管道顶部的限位轮(21),所述第二支架(6)包括两个在限位轮(21)轴向呈相对分布的架体(6-1),线缆自两个架体(6-1)之间穿过并位于限位轮(21)下方。
10.根据权利要求9所述的管道检测机器人,其特征在于,所述架体(6-1)包括内杆(6-1a)及套设在内杆(6-1a)外的外杆(6-1b),限位轮(21)安装在内杆(6-1a)上,内杆(6-1a)贯穿在外杆(6-1b)上,外管固定设置在第二支架(6)上,所述内杆(6-1a)的底端穿过外杆(6-1b)后固定连接钢丝绳(22)的一端,钢丝绳(22)的另一端依次贯穿第二支架(6)和第一支架(5)并延伸至转动体(9)内,且转动体(9)内设置有可沿第一支架(5)轴向位移的卡块(23),钢丝绳(22)的上述另一端连接在卡块(23)上,且车体(1)上固定设置有与卡齿轮(24),且卡块(23)设置成沿第一支架(5)的轴向朝第一支架(5)位移可与卡齿轮(24)卡接。
技术总结
本发明提出了一种管道检测机器人,属于管道修复设备技术领域。所述管道检测机器人,包括车体、摄像头、补光灯及设置在车体尾部的线缆快接头,所述车体上设置有依次转动配合的第一支架、第二支架、第三支架和第四支架,所述第四支架相对于第一支架的一端固定在车体的尾部,所述第一支架相对于第四支架的一端通过转动体转动安装在车体上,所述第一支架相对于第二支架的一端上安装有第一引导轮、第二支架相对于第三支架的一端安装有第二引导轮,第四支架相对于第三支架的一端安装有第三引导轮。本发明具有更好的保护线缆及提高管道检测机器人在管道内行走性能的优点。
技术研发人员:孙小江,孙大江,吴娅真
受保护的技术使用者:安徽艾特巴机械制造有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!