一种基于腱绳传动的摄像支撑云台
本发明公开了一种基于腱绳传动的摄像支撑云台,属于机械云台领域。
背景技术:
1、国外研究发现,鸡有一项特殊技能,如果你抱一只鸡随意晃,鸡头都会保持稳定不动,其实,这是鸟类的“种族天赋”。比如鸽子,鸽子能保持视线稳定,消除视线的晃动干扰。美国一所大学研究提出并证明鸽子走路时,头部并不是有规律地前后移动,而是一直在往前伸。在行走时,鸽子脖子往前一顶,头先行。然后,头部静止在先前位置,等待着身体和脚跟进。鸡的动作也是如此。
2、国内研究方面,有研究人员之前将摄像头固定在鸡的头部进行拍摄,然而结果并不理想。让鸡配合做试验难度大,实验人员把摄像头粘在鸡冠上,实验才能勉强进行。在跑动过程中鸡头并不稳定,会随意地看向左右,这就是鸡头稳定器的一个弊端,鸡想看的风景,未必就是实验人员想拍的画面。
3、鸡对空间的变化非常敏感,只要头部发生很小的移动,它们就能立刻感觉出,眼中看到的物体的相对位置发生的微小改变,瞬间就可以把头调整到原来的位置。鸟类保持头部稳定是为了保持视线的稳定,因为鸟类眼球的转动范围有限,不能转动很大的角度,使得鸟类只好依靠灵活的脖子来调整视线。
4、1930年,美国约翰霍普金斯大学(john hopkins university)的生物学家邓拉普(knight dunlap)和莫瑞尔(o.h.mowrer)提出鸽子走路时,头部并不是有规律地前后移动,而是一直在往前伸的说法。他们找了个房间,在房间的一头放了些食物,然后在另一头放出鸽子,由其去追寻食物,同时用一个简陋得甚至不如现今许多手机的相机,拍摄得到了鸽子们的行走图片。通过这个简单无比的实验与模糊不清的照片告诉我们,鸽子走路时,头部并不是有规律地前后移动,而是一直在往前伸。在行走时,鸽子脖子往前一顶,头先行,然后,头部静止在先前位置,等待着身体和脚跟进。只是因为身子往前移,头对身体的相对位置挪后,造成了先往前点头、再向后缩脖子的假象。
5、弗莱得曼在对鸽子走路姿态研究后得出结论:平衡和行走不足以让鸽子点头,而鸽子“点头”与保持视野稳定有很大关系。
6、鸡脖子的稳定原理可以解释为前庭眼反射。前庭眼反射是一种的生理反射,其生理意义在于动物在运动时,眼球能够精准同步地反向运动从而使视觉目标稳定在视网膜黄斑处。从功能模式上分类,前庭眼反射由三大部分组成:前庭外周感受器及传入通路,前庭中枢,运动传出通路。而鸡脖子稳定的特殊之处在于它的运动传出通路控制的不单是眼球,而是整个头部。这也与鸡的头部构造相关,鸡的眼球的转动范围有限,不能转动很大的角度,使得鸡只好依靠灵活的脖子来调整视线了。
7、由弗莱德曼得出的结论,我们在此观点的基础上进行延伸,可以利用鸡的颈部进行调节而鸡的头部保持不动这一现象做一个摄像装置,因此我们对鸡脖子的运动状态进行了模拟设计了一种基于腱绳传动的仿生摄像支撑装置。
8、同时在步入二十一世纪后,随着人们生活质量的提高,对精神物质的需求也逐渐增加,尤其是现如今需要照片摄影的工作也逐渐增加,因此对拍摄的稳定性的要求也逐渐增加,因此这款产品有着广阔的应用空间。当下专业摄像机的价格居高不下,且部分体积又过大,使用不便。本产品从上述几点出发,创造了成本低且体积较小的稳定器。
技术实现思路
1、本发明的目的在于模仿鸡脖子原本的结构,将鸡颈部机械化,设计一款新型的摄像支撑装置,具备一定防抖性能、可以进行稳定拍摄。
2、本发明的目的可以通过采用如下技术方案达到:
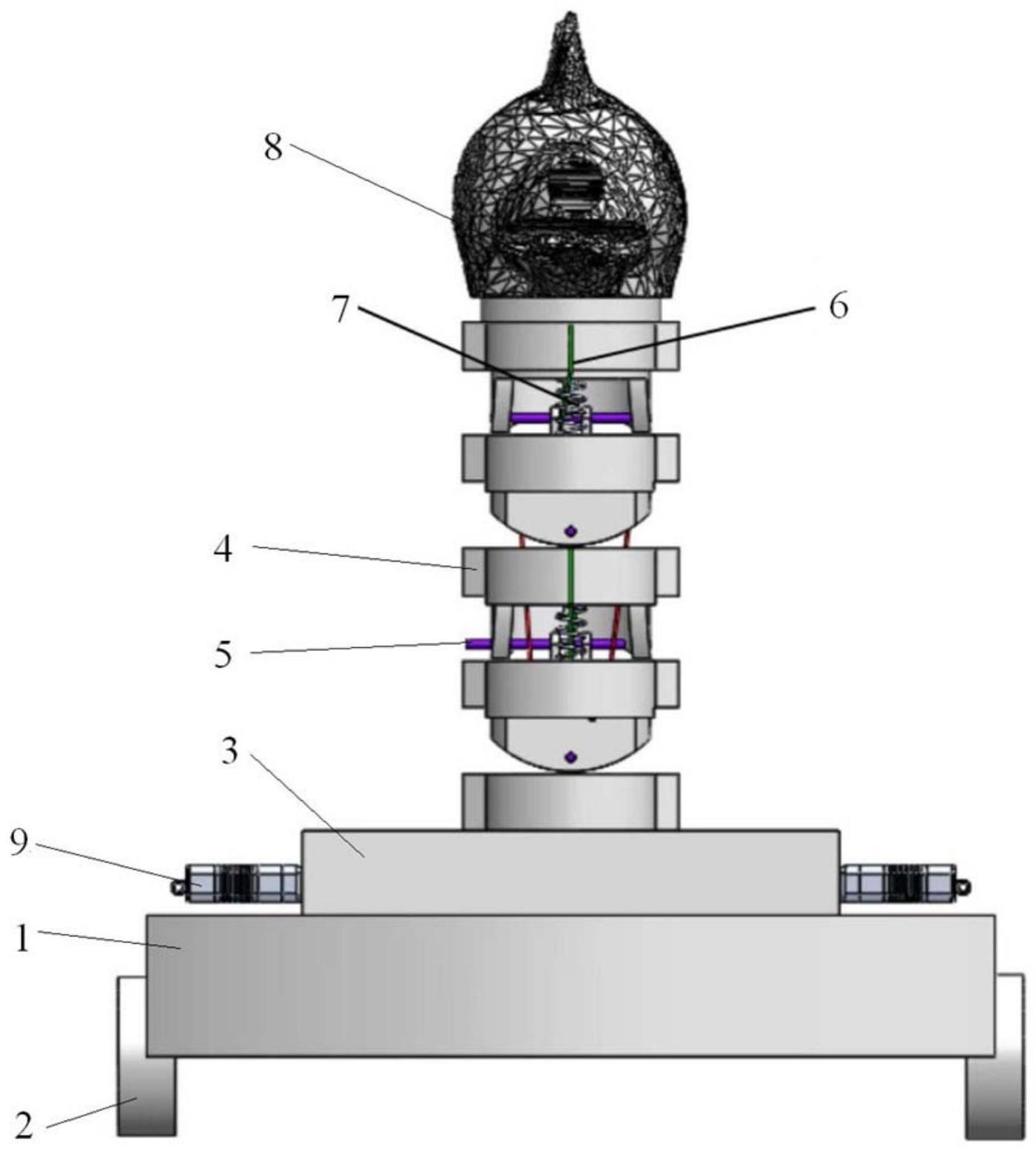
3、一种基于腱绳传动的摄像支撑云台,其特征在于,包括有底座,所述底座下设置有驱动轮,所述底座1上固定设置有支撑平台,所述支撑平台中心固定连接有空心圆柱,所述空心圆柱上方由下向上依次设置有四个骨节,每个所述的骨节底端转动连接有销轴,所述支撑平台中央为圆形通孔,所述圆形通孔下方转动连接有若干动滑轮,所述支撑平台内设置有若干电机,每个所述电机均连接有腱绳,每个所述腱绳分别通过对应的定滑轮与相应的所述骨节连接,处于最上方的所述骨节上方固定设置有摄像机。
4、优选的,所述的骨节包括有上端面和下端面,所述的腱绳固定连接于对应骨节的下端面上。
5、优选地,所述的第一骨节上的销轴固定连接于第二骨节的上端面,第二骨节上的销轴固定连接于第三骨节的上端面,第三骨节上的销轴固定连接于第四骨节的上端面,第四骨节上的销轴固定连接于空心圆柱的上端面,所述第一骨节下端面和第二骨节上端面之间以及第三骨节下端面和第四骨节上端面之间固定连接有复位弹簧。
6、一种基于腱绳传动的摄像支撑云台的平稳控制方法,该方法包括如下:控制装置前后摆动的骨节均连接有一根腱绳,控制装置左右摆动的骨节均连接两根腱绳,两根腱绳分别控制两个方向的摆动,所述电机拉动腱绳后,来实现各个骨节的摆动,当腱绳上的拉力逐渐减小后,所述骨节在复位弹簧的作用下恢复竖直状态。
7、优选地,所述电机在拉动腱绳控制第二骨节或第四骨节左右摆动时,相应方向电机输出端的伸长量缩短一个阶段距离,拉动相应腱绳向下;且相反方向电机输出端的伸长量伸长一个阶段距离,放松相应腱绳向上,以此一方腱绳拉紧,一方腱绳放松实现稳定摆动,满足:
8、θ=sin-1(δx+d)-63.4°
9、式中:θ为骨节左右方向偏移角度,δx为电机收缩长度,d为骨节上拉绳捆绑处到骨节对称面的最短距离。
10、优选的,所述电机在拉动腱绳控制第一骨节或第三骨节前后摆动时,向前摆动时,所述电机输出端的伸长量伸长一个阶段距离,拉动相应腱绳向下动作,且拉紧复位弹簧7;向后摆动时,所述电机输出端的伸长量慢慢缩短一个阶段距离,复位弹簧7慢慢复位,相应腱绳慢慢放松,同时且满足:
11、θ=sin-1(0.183δx+d)-66°
12、式中:θ为骨节前后方向偏移角度,δx为电机收缩长度,d为骨节摆动的最前端到销轴中心的水平距离。
13、本发明的有益技术效果是:
14、1.本发明通过对腱绳的控制实现骨节的角度变化,由此为切入点进行多骨节的控制和多形态的呈现,在各个腱绳末端连接电机,有效实现角度的细微变化。其中前后转动的骨节采用腱绳牵引和弹簧复位同时作用,精准控制的同时达到一定程度减震稳定的效果,利于平台的稳定支撑。
15、2.本发明采用了腱绳作为传动方式来实现各个骨节之间的摆动,腱绳传动相对于齿轮传动精确度更高,而相对于皮带传动减少了链或带的体积,也在一定程度上减少了各部件之间带来的摩擦力,具有低噪声、无空回、高刚度、小惯量、传动平稳和维护费用较低的优势。
技术特征:
1.一种基于腱绳传动的摄像支撑云台,其特征在于,包括有底座(1),所述底座(1)下设置有驱动轮(2),所述底座(1)上固定设置有支撑平台(3),所述支撑平台(3)中心固定连接有空心圆柱,所述空心圆柱上方由下向上依次设置有四个骨节(4),每个所述的骨节(4)底部均转动连接有销轴(5),所述支撑平台(3)中央为圆形通孔,所述圆形通孔下方转动连接有若干动滑轮,所述支撑平台(3)内设置有若干电机(9),每个所述电机(9)均连接有一个腱绳(6),每个所述腱绳(6)分别通过对应的定滑轮与相应的所述骨节(4)连接,处于最上方的所述骨节(4)上方固定设置有摄像机(8)。
2.根据权利要求1所述的一种基于腱绳传动的摄像支撑云台,其特征在于,四个所述的骨节(4)由上往下分别为第一骨节、第二骨节、第三骨节和第四骨节,第一骨节与第三骨节可前后摆动,第二骨节与第四骨节可左右摆动。
3.根据权利要求1所述的一种基于腱绳传动的摄像支撑云台,其特征在于,所述的骨节(4)包括有上端面和下端面,所述的腱绳(6)固定连接于对应骨节(4)的下端面上。
4.根据权利要求1所述的一种基于腱绳传动的摄像支撑云台,其特征在于,所述的第一骨节上的销轴(5)固定连接于第二骨节的上端面,第二骨节上的销轴(5)固定连接于第三骨节的上端面,第三骨节上的销轴(5)固定连接于第四骨节的上端面,第四骨节上的销轴(5)固定连接于空心圆柱的上端面,所述第一骨节下端面和第二骨节上端面之间以及第三骨节下端面和第四骨节上端面之间固定连接有复位弹簧(7)。
5.一种基于腱绳传动的摄像支撑云台的平稳控制方法,该方法包括如下:控制前后摆动的骨节均连接有一根腱绳,控制装置左右摆动的骨节均连接两根腱绳,两根腱绳分别控制两个方向的摆动,所述电机(9)拉动腱绳后,来实现各个骨节的摆动,当腱绳上的拉力逐渐减小后,所述骨节在复位弹簧的作用下恢复竖直状态。
6.根据权利要求5所述的一种基于腱绳传动的摄像支撑云台的平稳控制方法,其特征在于,所述电机在拉动腱绳控制第二骨节或第四骨节左右摆动时,相应方向电机输出端的伸长量缩短一个阶段距离,拉动相应腱绳向下;且相反方向电机输出端的伸长量伸长一个阶段距离,放松相应腱绳向上,以此一方腱绳拉紧,一方腱绳放松实现稳定摆动,满足:
7.根据权利要求5所述的一种基于腱绳传动的摄像支撑云台的平稳控制方法,其特征在于,所述电机(9)在拉动腱绳控制第一骨节或第三骨节前后摆动时,向前摆动时,所述电机输出端的伸长量伸长一个阶段距离,拉动相应腱绳向下动作,且拉紧复位弹簧(7);向后摆动时,所述电机(9)输出端的伸长量慢慢缩短一个阶段距离,相应腱绳慢慢放松,使得复位弹簧(7)逐渐复位,拉动骨节动作,同时且满足:
技术总结
本发明公开了一种基于腱绳传动的摄像支撑云台,具体包括有底座,所述底座下设置有驱动轮,所述底座上固定设置有支撑平台,所述支撑平台中心固定连接有空心圆柱,所述空心圆柱上方由下向上依次设置有四个骨节,四个所述的骨节由上往下分别为第一骨节、第二骨节、第三骨节和第四骨节,每个所述的骨节底端均转动连接有销轴,与现有技术相比,本发明本发明通过对腱绳的控制实现骨节的角度变化,由此为切入点进行多骨节的控制和多形态的呈现,其中前后转动的骨节采用腱绳牵引和弹簧复位同时作用,精准控制的同时达到一定程度减震稳定的效果,利于平台的稳定支撑。
技术研发人员:俞艺梦,卢云辉,张隽隽,刘月梅,蔡姚杰
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!