一种轻量化可调式机器人底座的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种轻量化可调式机器人底座。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发;
3.现有的机器人底座在使用时,无法根据需要对底座的高度进行调节,使得机器人只能够在一种高度进行作业,无法进行其他高度的操作,降低了机器人的适用范围。
技术实现要素:
4.基于现有的机器人底座无法进行高度调节,使得机器人只能够在一种高度进行作业,无法进行其他高度的操作,降低了机器人的适用范围的技术问题,本实用新型提出了一种轻量化可调式机器人底座。
5.本实用新型提出的一种轻量化可调式机器人底座,包括底板,所述底板上表面的四角处均开设有第一调节口,四个所述第一调节口的内壁螺纹连接有用于对所述底板高度进行调节和支撑的调节杆,所述调节杆的顶端外表面固定套接有第一调节套,所述调节杆位于所述底板下方的外表面螺纹连接有第二调节套,所述底板的下表面固定连接有四个呈矩形阵列分布的万向轮;
6.所述底板的上表面固定连接有第一连接板,所述第一连接板的上表面固定连接有四个相互拼接的承重架,所述承重架的顶端表面设置有用于对机器人进行安装的安装台,所述安装台的两侧表面均固定连接有握把,安装台的顶端内壁设置有用于对所述安装台的高度进行调节的调节部件,所述调节部件包括安装块,所述安装块的内壁开设有两个呈对称分布的伸缩槽。
7.优选地,所述伸缩槽的一侧内壁开设有第一连接槽,所述安装台的下表面固定连接有两个呈对称分布的支撑块,且两个所述支撑块的下表面均固定连接有移动块,两个所述支撑块的一侧表面均开设有齿槽;
8.通过上述技术方案,达到了通过伸缩槽对支撑块进行导向和安装的效果。
9.优选地,所述第一连接槽的两端内壁均开设有第一连接口,所述第一连接口的内壁通过轴承固定连接有转动轴,且所述转动轴的外表面固定套接有用于控制所述支撑块移动的止回齿轮,所述止回齿轮通过与所述齿槽的啮合对所述支撑块的上下升降进行控制;
10.通过上述技术方案,达到了通过止回齿轮与齿槽的配合对支撑块的位置进行限位的效果。
11.优选地,所述安装块的一侧表面开设有控制槽,所述控制槽的内壁开设有环形限
位槽,所述转动轴的一端延伸至所述控制槽的内部并固定连接有开设十字卡槽的连接柱。
12.优选地,所述环形限位槽的内壁活动套接有对所述连接柱进行限位的环形卡套,所述环形卡套的一端表面固定连接有连接杆,所述连接杆的一端外表面旋转套接有固定盘,所述连接杆的一端周侧面开设有呈环形阵列分布的插接口;
13.通过上述技术方案,达到了通过环形限位槽对环形卡套进行限位和导向,并通过连接杆将环形卡套与固定盘之间进行连接的效果。
14.优选地,所述固定盘的内壁开设有伸缩口,所述伸缩口的两端内壁均开设有贯穿口,所述贯穿口的内壁与所述插接口的内壁相互连通,所述伸缩口的内壁活动套接有限位盘,所述限位盘的中部固定套接有插接杆;
15.通过上述技术方案,达到了通过伸缩口对限位盘的限位,使得插接杆无法从贯穿口内掉出的效果。
16.优选地,所述伸缩口的一端表面固定连接有弹簧,且所述弹簧的自由端与所述限位盘的一端固定连接,所述插接杆的一端表面固定连接有操作杆,所述安装块的一端外表面开设有固定口,所述固定盘的外表面与所述固定口的内壁螺纹连接;
17.通过上述技术方案,达到了通过弹簧对限位盘的挤压,使得插接杆始终插入插接口的内部,使得固定盘无法围绕连接杆进行旋转,进而对止回齿轮的周向运动进行限位,进而将支撑块固定在指定高度的效果。
18.本实用新型中的有益效果为:
19.通过设置调节部件,达到了通过对操作杆的控制带动插接杆带动限位盘在伸缩口内移动,使得插接杆从插接口内拉出,使得环形卡套与连接柱之间取消卡接,将安装台向上拉动,使得支撑块在伸缩槽内移动,并通过对止回齿轮的周向限位,使得支撑块保持在指定高度,进而使得机器人底座可根据实际需要对高度进行调整的效果。
附图说明
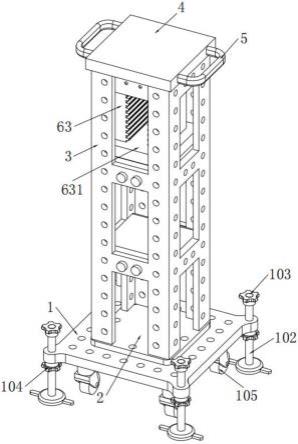
20.图1为本实用新型提出的一种轻量化可调式机器人底座的示意图;
21.图2为本实用新型提出的一种轻量化可调式机器人底座的安装块结构剖视图;
22.图3为本实用新型提出的一种轻量化可调式机器人底座的底板结构立体图;
23.图4为本实用新型提出的一种轻量化可调式机器人底座的支撑块结构立体图;
24.图5为本实用新型提出的一种轻量化可调式机器人底座的固定盘结构剖视图;
25.图6为本实用新型提出的一种轻量化可调式机器人底座的止回齿轮结构立体图。
26.图中:1、底板;101、第一调节口;102、调节杆;103、第一调节套;104、第二调节套;105、万向轮;2、第一连接板;3、承重架;4、安装台;5、握把;6、安装块;61、伸缩槽;62、第一连接槽;63、支撑块;631、移动块;64、齿槽;65、转动轴;66、止回齿轮;67、控制槽;68、环形限位槽;69、连接柱;610、环形卡套;611、连接杆;612、固定盘;613、插接口;614、伸缩口;615、贯穿口;616、限位盘;617、插接杆;618、弹簧;619、操作杆;620、固定口。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。
28.参照图1-6,一种轻量化可调式机器人底座,包括底板1,为了调节底板1与地面的距离,在底板1上表面的四角处均开设有第一调节口101,进一步的,在四个第一调节口101的内壁螺纹连接有用于对底板1高度进行调节和支撑的调节杆102,为了对调节杆102进行控制,在调节杆102的顶端外表面固定套接有第一调节套103,进一步的,在调节杆102位于底板1下方的外表面螺纹连接有第二调节套104,为了便于机器人底座进行移动位置,在底板1的下表面固定连接有四个呈矩形阵列分布的万向轮105。
29.为了对机器人进行安装,在底板1的上表面固定连接有第一连接板2,并在第一连接板2的上表面固定连接有四个相互拼接的承重架3,进一步的,在承重架3的顶端表面设置有用于对机器人进行安装的安装台4,为了便于对安装台4进行高度调节,在安装台4的两侧表面均固定连接有握把5,为了在安装台4调节到指定高度后对安装台4进行限位,在安装台4的顶端内壁设置有用于对安装台4的高度进行调节的调节部件,调节部件包括安装块6。
30.为了将支撑块63安装在安装块6内,在安装块6的内壁开设有两个呈对称分布的伸缩槽61,并在伸缩槽61的一侧内壁开设有第一连接槽62,进一步的,为了对安装台4进行支撑,在安装台4的下表面固定连接有两个呈对称分布的支撑块63,且两个支撑块63的下表面均固定连接有移动块631,并在两个支撑块63的一侧表面均开设有齿槽64,通过伸缩槽61对支撑块63进行导向和安装。
31.为了对转动轴65进行安装,在第一连接槽62的两端内壁均开设有第一连接口,并在第一连接口的内壁通过轴承固定连接有转动轴65,为了对支撑块63进行限位,在转动轴65的外表面固定套接有用于控制支撑块63移动的止回齿轮66,止回齿轮66通过与齿槽64的啮合对支撑块63的上下升降进行控制,通过止回齿轮66与齿槽64的配合对支撑块63的位置进行限位。
32.为了对环形卡套610进行限位安装以及对连接柱69进行安装,在安装块6的一侧表面开设有控制槽67,并在控制槽67的内壁开设有环形限位槽68,进一步的,在转动轴65的一端延伸至控制槽67的内部并固定连接有开设十字卡槽的连接柱69,为了对连接杆611的转动进行控制,在环形限位槽68的内壁活动套接有对连接柱69进行限位的环形卡套610,为了对固定盘612进行进行安装,在环形卡套610的一端表面固定连接有连接杆611,进一步的,在连接杆611的一端外表面旋转套接有固定盘612,达到了通过环形限位槽68对环形卡套610进行限位和导向,并通过连接杆611将环形卡套610与固定盘612之间进行连接。
33.为了使固定盘612与连接杆611之间可通过需要进行旋转和固定,在连接杆611的一端周侧面开设有呈环形阵列分布的插接口613,进一步的,在固定盘612的内壁开设有伸缩口614,为了使插接杆617延伸至固定盘612的外部,在伸缩口614的两端内壁均开设有贯穿口615,并使贯穿口615的内壁与插接口613的内壁相互连通,为了对插接杆617的位置进行控制,在伸缩口614的内壁活动套接有限位盘616,并在限位盘616的中部固定套接有插接杆617,通过伸缩口614对限位盘616的限位,使得插接杆617无法从贯穿口615内掉出。
34.为了使得插接杆617在不受外力的作用下始终插入插接口613内,在伸缩口614的一端表面固定连接有弹簧618,且弹簧618的自由端与限位盘616的一端固定连接,为了便于对固定盘612进行操作,在插接杆617的一端表面固定连接有操作杆619,进一步的,为了对固定盘612进行固定,在安装块6的一端外表面开设有固定口620,并使得固定盘612的外表
面与固定口620的内壁螺纹连接,达到了通过弹簧618对限位盘616的挤压,使得插接杆617始终插入插接口613的内部,使得固定盘612无法围绕连接杆611进行旋转,进而对止回齿轮66的周向运动进行限位,进而将支撑块63固定在指定高度的效果。
35.工作原理:在需要将机器人底座放置在确定的地方,使其不移动并抬高底板1与地面的距离使,工作人员将万向轮105锁住,并旋转第二调节套104,使得第二调节套104远离底板1,随后旋转第一调节套103,使调节杆102在第一调节口101内移动,进而达到对底板1与地面之间的距离进行控制和调节;
36.当需要对安装台4的高度进行控制时,将操作杆619向侧面拉动,通过插接杆617带动限位盘616在伸缩口614内移动,使得插接杆617从插接口613内拉出,旋转固定盘612,使得固定盘612从固定口620内旋出,并将操作杆619向胸口方向拉动,使得环形卡套610与连接柱69之间取消卡接,另外一名工作人员握住握把5将安装台4向上拉动,使得支撑块63在伸缩槽61内移动,进而带动止回齿轮66旋转;
37.在调整到需要的高度后,工作人员取消对操作杆619向胸口拉动的作用力,使得环形卡套610卡入连接柱69的卡槽内并将固定盘612与固定口620连接,再松开操作杆619,通过弹簧618对限位盘616的推动带动插接杆插入到插接口613内,将固定盘612与连接杆611进行固定和限位。
38.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1