一种磁悬浮轴承控制器用的控制装置的制作方法
本技术涉及控制器领域,特别涉及一种磁悬浮轴承控制器用的控制装置。
背景技术:
1、磁悬浮轴承(magnetic bearing)是利用磁力作用将转子悬浮于空中,使转子与定子之间没有机械接触。磁悬浮轴承一般包括控制器、转子、电磁线圈、位移传感器和功率放大器等部件。
2、磁悬浮轴承的基本工作原理是:当转轴处于轴套内径中心位置时,转轴与轴套中的各个电磁铁下的气隙长度相等,此状态称之为磁悬浮轴承转轴的平衡状态。如果磁悬浮轴承的转轴处于平衡状态并稳定运行时,转轴上的负载突然有一变化,原来处于平衡的状态被破坏,每个电磁铁下的气隙长度也发生了变化,此时电磁铁下的间隙传感器将立即反映出这一变化,磁悬浮轴承中的控制器将根据这一变化调节各个电磁铁线圈中的电流来改变各个电磁铁的电磁力,使得转轴回到原来的平衡状态。由此可见,控制器是磁悬浮轴承的核心部件。
3、控制器中的控制装置用于获取磁悬浮轴承中的传感器所采集的变化信号,并基于变化信号生成pwm(pulse width modulation,脉宽调制)控制波形。在现有技术中,控制装置都采用dsp或其同类控制芯片对功率器件进行控制,输出的pwm波形开关频率和基波频率都较低。由于控制装置输出的pwm波形的载波比低,使磁悬浮轴承控制器输出的电流纹波大,从而导致线圈发热、控制不准等问题,直接影响到磁悬浮轴承的稳定性、精度等性能。同时,磁悬浮轴承的散热设计较为困难,高线圈发热等问题会进一步导致磁悬浮轴承实际带负载的容量下降。
技术实现思路
1、针对上述问题,本实用新型的目的是提供一种磁悬浮轴承控制器用的控制装置,采用soc fpga并行加速控制技术,可使磁悬浮轴承稳态精度高、动态响应速度快。
2、为实现上述目的,本实用新型采取以下技术方案:
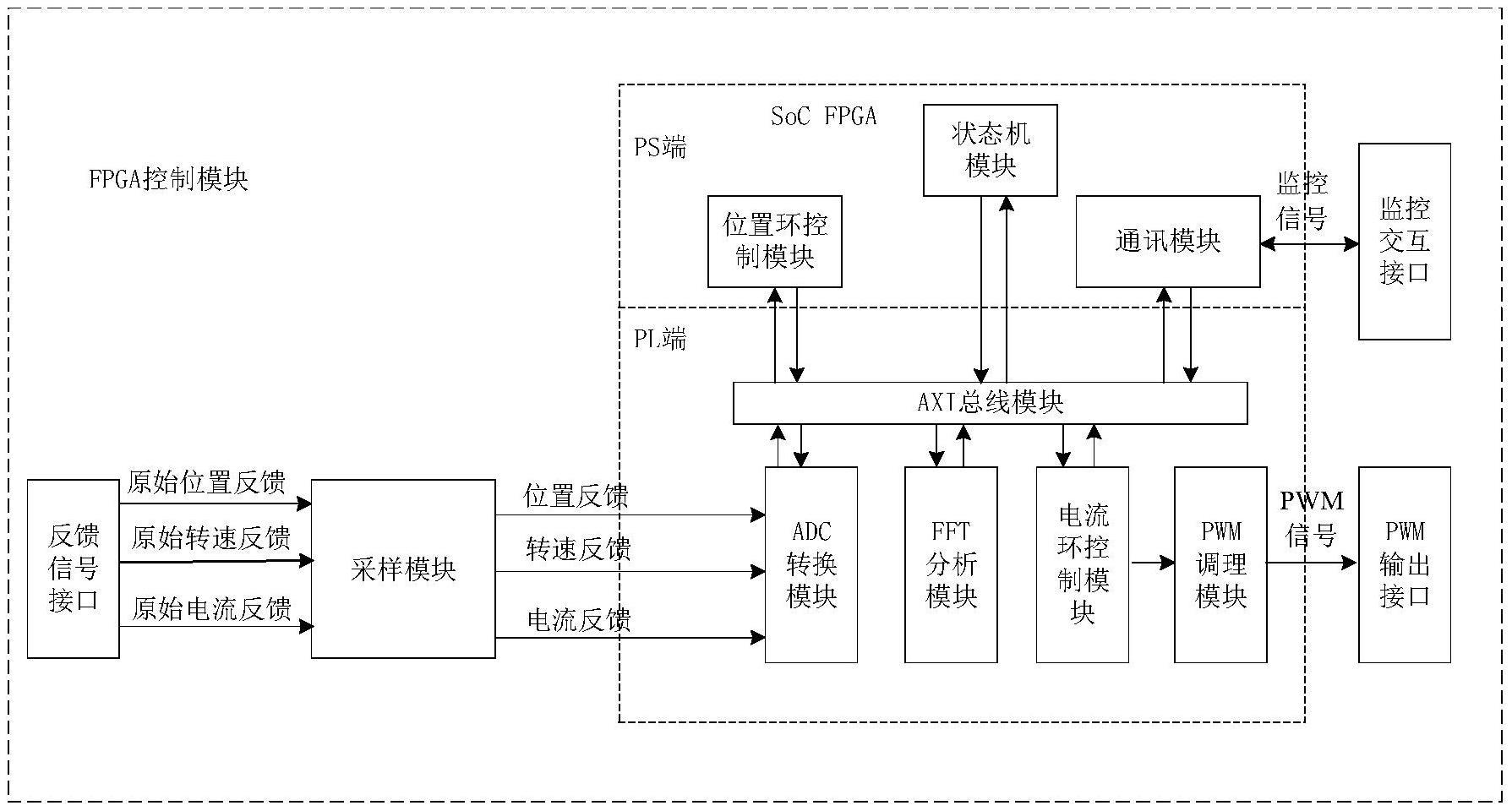
3、一种磁悬浮轴承控制器用的控制装置,包含反馈信号接口、采样模块、adc转换模块、axi总线模块、位置环控制模块、电流环控制模块、pwm调理模块和pwm输出接口;其中,
4、所述反馈信号接口用于获取磁悬浮轴承控制器的负载线圈电流反馈信号、磁悬浮轴承的位置反馈信号以及磁悬浮轴承的转速反馈信号;所述采样模块用于对所述电流反馈信号、位置反馈信号以及转速反馈信号分别进行处理,并将处理后的电流反馈信号、位置反馈信号以及转速反馈信号输入所述adc转换模块;所述adc转换模块用于对处理后的电流反馈信号、位置反馈信号以及转速反馈信号做模数转换,并将经过模数转换的电流反馈信号、位置反馈信号以及转速反馈信号传输至所述axi总线模块;
5、所述位置环控制模块从所述axi总线模块接收模数转换后的位置反馈信号并与位置控制的参考值进行比较运算,比较运算所得到的输出电流控制参考值传输至所述axi总线模块;所述电流环控制模块从所述axi总线模块接收所述模数转换后的电流反馈信号以及所述输出电流控制参考值,并将所述电流反馈信号与所述输出电流控制参考值进行比较,根据比较结果生成pwm控制指令并传输至pwm调理模块;所述pwm调理模块接收所述pwm控制指令,并对所述pwm控制指令进行调理操作,输出调理后的pwm控制波形至所述pwm输出接口。
6、上述技术方案中,还包括:fft分析模块、状态机模块、通讯模块和监控交互接口;其中,
7、所述fft分析模块从所述axi总线模块中获取模数转换后的电流反馈信号、位置反馈信号以及转速反馈信号,对这些信号故fft傅里叶变换,得到相应的频域信号,并将所得到的频域信号输出至所述axi总线模块;所述状态机模块基于从所述axi总线模块中获取的模数转换后的电流反馈信号、位置反馈信号、转速反馈信号各自所对应的频域信号,得到磁悬浮轴承运行的状态结果,并将所述磁悬浮轴承运行的状态结果输出至所述axi总线模块;所述通讯模块从所述axi总线模块获得磁悬浮轴承运行的状态结果、关键参数和故障信息,通过监控交互接口传输给磁悬浮轴承控制器的hmi模块和上位机,并接收磁悬浮轴承控制器的hmi模块或上位机发送的用户控制指令。
8、上述技术方案中,所述控制装置采用soc fpga芯片实现。
9、上述技术方案中,所述soc fpga芯片包括pl端和ps端;其中,
10、所述pl端包括所述axi总线模块、所述adc转换模块、所述fft分析模块、所述电流环控制模块和所述pwm调理模块;
11、所述ps端包括所述位置环控制模块、所述状态机模块和所述通讯模块。
12、上述技术方案中,所述采样模块中的电流采样滤波器为抗混叠滤波器,包含第一电阻11、第二电阻12、第三电阻13、第四电阻14、第五电阻15、第六电阻16、第一电容17、第二电容18、第三电容19、第一运算放大器110、原始电流反馈信号输入端和电流反馈信号输出端;
13、原始电流反馈信号输入端与第一电阻11的一端连接,第一电阻11的另一端分别与第二电阻12的一端和第三电阻13的一端连接;第三电阻13的另一端进行接地连接;第二电阻12的另一端分别与第二电容18的一端和第四电阻14的一端相连;第四电阻14的另一端分别与第一电容17的另一端和第一运算放大器110的正极输入端3号端口相连;第一电容17的另一端进行接地连接;第一运算放大器110的正电源端8号端口连接+15v,第一运算放大器110的负电源端4号端口连接-15v,第一运算放大器110的输出端1号端口分别连接第三电容19一端和第五电阻15一端,第一运算放大器110的负极输入端2号端口分别连接第三电容19的另一端、第五电阻15的另一端、第二电容18的另一端和第六电阻16的一端;第六电阻16的另一端连接电流反馈信号输出端。
14、上述技术方案中,所述采样模块中的位置采样比例放大器包含第七电阻21、第八电阻22、第九电阻23、第十电阻24、第十一电阻25、第十二电阻26、第十三电阻27、第四电容28、第五电容29、第二运算放大器210、第三运算放大器211、原始位置反馈信号输入端和位置反馈信号输出端;
15、原始位置反馈信号输入端与第七电阻21的一端、第八电阻22的一端相连;第七电阻21的另一端与第二运算放大器210的正极输入端3号端口、第四电容28的一端相连;第二运算放大器210的负极输入端2号端口进行接地连接,第二运算放大器210的正电源端8号端口连接+15v,第二运算放大器210的负电源端4号端口连接-15v;第二运算放大器210的输出端1号端口与第四电容28的另一端、第八电阻22的另一端和第九电阻23的一端相连;第九电阻23的另一端与第十三电阻27的一端、第三运算放大器211的正极输入端5号端口、第五电容29的一端和第十二电阻26的一端相连;第十三电阻27的另一端连接参考电压;第三运算放大器211的负极输入端6号端口进行接地连接,第三运算放大器211的输出端7号端口与第五电容29的另一端、第十电阻24的一端相连;第十电阻24的另一端和第十一电阻25的一端、第十二电阻26的另一端相连;第十一电阻25的另一端和位置反馈信号的输出端相连。
16、上述技术方案中,所述采样模块中的转速调理整形电路包含第十四电阻31、第十五电阻32、第十六电阻33、第十七电阻34、第十八电阻35、第十九电阻36、第二十电阻37、第二十一电阻38、第二十二电阻39、第六电容310、第七电容311、第八电容312、第九电容313、第十电容314、第四运算放大器315、第五运算放大器316、原始转速反馈信号输入端和转速反馈信号输出端;
17、原始转速反馈信号输入端与第六电容310的一端、第十四电阻31的一端相连;第十四电阻31的另一端进行接地连接;第六电容310的另一端与第十五电阻32的一端相连;第十五电阻32的另一端与第四运算放大器315的正极输入端5号端口、第十九电阻36的一端和第八电容312的一端相连;第十九电阻36的另一端、第八电容312的另一端进行接地连接;第四运算放大器315的负极输入端6号端口与第十六电阻33的一端、第七电容311的一端和第十七电阻34的一端相连;第四运算放大器315的输出端7号端口与第七电容311的另一端、第十七电阻34的另一端和第十八电阻35的一端相连;第十六电阻33的另一端进行接地连接;第十八电阻35的另一端和第九电容313的一端、第五运算放大器316的负极输入端2号端口相连;第九电容313的另一端进行接地连接;第五运算放大器316的正极输入端3号端口与第二十电阻37的一端、第二十二电阻39的一端和第十电容314的一端相连;第二十电阻37的另一端进行接地连接;第五运算放大器316的正电源端8号端口连接+15v,第五运算放大器316的负电源端4号端口连接-15v,第五运算放大器316的输出端1号端口连接第二十一电阻38的一端、第二十二电阻39的另一端和第十电容314的另一端;第二十一电阻38的另一端与转速反馈信号输出端相连。
18、本实用新型由于采取以上技术方案,其具有以下优点:
19、1、本实用新型采用fpga对磁悬浮轴承进行控制,可输出高于传统dsp控制方案的高频率pwm波形,大幅提高pwm波形的开关频率,从而提升输出的基波频率和载波比。因此输出的电流波形的纹波更小,使磁悬浮轴承执行器中的功率器件损耗降低,提高整体系统的功率容量和功率密度。
20、2、本实用新型利用fpga的高速运算能力,通过axi总线模块有效合理地分配进程,使高速adc转换、位置环控制、电流环控制、pwm调理、通讯功能同步并行协调,实现soc fpga加速运行,最终运行效率大幅超过传统的dsp控制。
21、3、本实用新型使用fpga进行高速adc转换,实现反馈信号的高精度、低延时的采样,为磁悬浮轴承的精准控制提供了高速反馈输入,为高速控制提供了基础。
22、4、本实用新型运用soc fpga并行加速控制技术,具备高速控制和高速通讯的能力,使磁悬浮轴承控制器和高速电机控制器能协同工作,提升高速电机系统的整体性能。
- 还没有人留言评论。精彩留言会获得点赞!