一种超高压远程卸压自动卸压装置的制作方法
1.本实用新型涉及一种超高压远程卸压自动卸压装置,属于超高压增压设备的自动控制技术领域。
背景技术:
2.超高压系统的工作流程:油泵向超高压增压器注入压力油推动活塞,经电液换向阀使活塞做往复运动,不间断地向容器内增压至1000mpa,然后缓慢卸载系统压力。
3.目前,超高压设备卸压装置仍有采用手动卸压方式,手动卸压难以精确控制,完全依靠操作者的经验对系统压力卸载进行控制,并且生产过程中的卸压安全性低。
技术实现要素:
4.本实用新型目的是提供一种操作简便,能够远程自动控制,实现人机分离,卸压安全性提高、卸压速度可控、卸压方式相互切换的超高压远程卸压自动卸压装置。
5.本实用新型解决其技术问题采用的技术方案如下:
6.一种超高压远程卸压自动卸压装置,包括背板、支座、卸压阀、步进电动机、fpga开发板、激光位移传感器、工控机柜、把手机构、手轮,其特征是:卸压阀由阀座、阀套、阀芯、顶杆、螺母组成,阀芯安装在阀套中,将阀芯、阀套一起装在阀座孔内,用螺母锁紧,顶杆嵌入阀芯尾端并穿过螺母,卸压阀固定在背板的左侧,顶杆穿过背板,顶杆的端部安装一个大齿轮;在支座上固定有步进电动机、手轮,步进电动机的输出轴端安装有第一驱动齿轮,手轮的连杆端安装有第二驱动齿轮,在背板的右侧设有两条纵向的平行轨道,支座上设有与平行轨道对应的导轨,支座通过导轨与背板平行轨道连接,在背板和支座之间设有把手机构,把手机构能够控制支座沿背板上下移动一个固定距离,支座向上移动能够使第一驱动齿轮与大齿轮啮合,支座向下移动能够使第二驱动齿轮与大齿轮啮合,激光位移传感器固定在背板的右侧大齿轮的附近;工控机柜内部安装固定有:步进电动机驱动器、fpga开发板、锁紧按钮、松开按钮、急停按钮、数显屏,电源,锁紧按钮、松开按钮、数显屏与fpga开发板通过信号线连接,fpga开发板与步进电动机驱动器通过信号线连接,步进电动机驱动器与步进电动机通过信号线连接,激光位移传感器与fpga开发板通过信号线连接。
7.所述把手机构包括把手、限位器、支撑块、第一连接支座、第二连接支座、锁紧螺母、提升杆,把手的前端设有两个相对的l形提升叉,l形提升叉上开有上连接孔和下连接孔,限位器由两个平行连接板和连接在两个平行连接板一侧的限位板组成,在两个平行连接板上开有上连接孔和下连接孔,支撑块上开有上下通孔和侧连接螺孔,支撑块下部设有螺纹连接管段,提升杆上端设有连接孔、下端设有挡块,第二连接支座固定在支座上,第一连接支座与背板固定,支撑块置于第一连接支座上,下端螺纹连接管段穿过第一连接支座的孔,用锁紧螺母拧紧支撑块,提升杆从下方穿过第二连接支座和支撑块,提升杆上端连接孔和把手l形提升叉上的下连接孔用轴连接,限位器上连接孔和把手的l形提升叉上的上连接孔连接,限位器的下连接孔和支撑块的侧连接螺孔用螺栓连接。
8.所述激光位移传感器固定在背板的右侧大齿轮的附近是指激光位移传感器安装在距离大齿轮齿廓50~100mm的位置。
9.与现有技术相比,本实用新型存在以下有益效果:
10.1、采用电子元件相互配合对超高压设备的卸压阀锁紧、松开实现远程自动控制,很好的保护设备和人员安全。
11.2、采用工控机柜数显屏显示故障报警,出现故障时,立即停机排除处理,可以将自动卸压切换成手动卸压。
12.3、整个远程自动卸压装置的安全性高、卸压速度可控。
附图说明
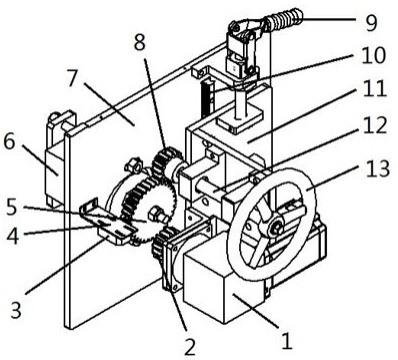
13.图1是本实用新型的超高压远程卸压自动卸压装置的机械结构示意图;
14.图2是本实用新型的工控机柜内部电气元件布置图;
15.图3是本实用新型的卸压阀的结构示意图;
16.图4是本实用新型的把手机构的结构示意图;
17.图5是本实用新型的把手的立体图;
18.图6是本实用新型的限位器的立体图;
19.图7是本实用新型的支撑块的立体图。
20.图中:1-步进电动机,2-第一驱动齿轮,3-激光位移传感器,4-激光位移传感器安装底座,5-大齿轮,6-卸压阀,7-背板,8-第二驱动齿轮,9-把手机构,10-导轨,11-支座,12-连杆,13-手轮, 21-步进电动机驱动器,22-工控机柜,23-24v电源,24-电源开关,25-松开按钮,26-锁紧按钮,27-数显屏,28-急停按钮,29-fpga开发板,31-阀座,32-螺母,33-顶杆,34-阀芯,35-阀套,51-限位器,52-支撑块,53-第一连接支座,54-锁紧螺母,55-提升杆,56-第二连接支座,91-把手,92-提升叉的上连接孔,93-提升叉的下连接孔,511-限位器的上连接孔,512
‑‑
限位器的下连接孔。
具体实施方式
21.参照附图1~3,本实用新型的一种超高压远程卸压自动卸压装置,包括背板7、支座11、卸压阀6、步进电动机1、fpga开发板29、激光位移传感器3、工控机柜22、把手机构9、手轮13,卸压阀由阀座31、阀套35、阀芯34、顶杆33、螺母32组成,阀芯安装在阀套中,将阀芯、阀套一起装在阀座孔内,用螺母锁紧,顶杆嵌入阀芯尾端并穿过螺母,卸压阀固定在背板的左侧,顶杆穿过背板,顶杆的端部安装一个大齿轮5;在支座上固定有步进电动机1、手轮13,步进电动机的输出轴端安装有第一驱动齿轮2,手轮13上连接有连杆12,连杆的另一端安装有第二驱动齿轮8,连杆通过连杆固定支座安装在支座11上,使得手轮13固定在了支座11上,旋转手轮13可以带动第二驱动齿轮8旋转;在背板的右侧设有两条纵向的平行轨道,支座上设有与平行轨道对应的导轨10,支座通过导轨与背板平行轨道连接,在背板和支座之间设有把手机构9,把手机构能够控制支座11沿背板7上下移动一个固定距离,支座向上移动能够使第一驱动齿轮2与大齿轮啮合5,支座向下移动能够使第二驱动齿轮8与大齿轮2啮合,激光位移传感器3固定在激光位移传感器安装底座4上,激光位移传感器安装底座固定在背板上,距离需检测齿轮齿廓50~100mm;工控机柜22内部安装固定有:步进电动机驱动
器21、fpga开发板29、锁紧按钮26、松开按钮25、急停按钮28、数显屏27,24v电源23、电源开关24,锁紧按钮、松开按钮、数显屏与fpga开发板通过信号线连接,fpga开发板与步进电动机驱动器通过信号线连接,步进电动机驱动器与步进电动机通过信号线连接,激光位移传感器与fpga开发板通过信号线连接。激光位移传感器输出4~20ma电流信号,fpga开发板采集电流信号来判断大齿轮是否转动。fpga开发板发送上升沿信号控制步进电动机驱动器,步进电动机驱动器控制步进电动机的转速。fpga开发板发送频率越高,步进电动机转速越快,阀芯和阀套的开口度越大,卸压速度越快。
22.参照附图4~7,所述把手机构9包括把手91、限位器51、支撑块52、第一连接支座53、第二连接支座56、锁紧螺母54、提升杆55,把手91的前端设有两个相对的l形提升叉,l形提升叉上开有上连接孔92和下连接孔93,限位器由两个平行连接板和连接在两个平行连接板一侧的限位板组成,在两个平行连接板上开有上连接孔511和下连接孔512,支撑块52上开有上下通孔和侧连接螺孔,支撑块下部设有螺纹连接管段,提升杆上端设有横向连接孔、下端设有挡块,第二连接支座56固定在支座11上,第一连接支座53与背板7固定,支撑块52置于第一连接支座上,下端螺纹连接管段穿过第一连接支座的孔,用锁紧螺母拧紧支撑块,提升杆55从下方穿过第二连接支座和支撑块,提升杆上端横向连接孔和把手l形提升叉上的下连接孔用轴连接,限位器上连接孔和把手的l形提升叉上的上连接孔连接,限位器的下连接孔和支撑块的侧连接螺孔用螺栓连接。
23.本实用新型的工控机柜22与本实用新型的超高压远程卸压自动卸压阀装置的机械结构部分是分置的,即:本实用新型的超高压远程卸压自动卸压阀装置的机械结构部分与超高压系统设置在一起,用来控制超高压系统的卸压过程。而本实用新型的工控机柜22则设置在控制室,其与本实用新型的超高压远程卸压自动卸压阀装置的机械结构部分通过信号线连接,对超高压远程卸压自动卸压阀装置的机械结构部分进行远程控制。
24.本实用新型判断超高压系统是否需要卸压是通过在靠近超高压系统容器处安装压力传感器,压力传感器经信号线与安装在控制室的压力数显表相连接,压力数显表显示压力值。当压力值达到操作者规定的数值时,立即切断液压系统油泵电动机电源,开始对系统进行卸压。
25.具体卸压控制方法是:激光位移传感器检测顶杆上大齿轮位移量,激光位移传感器输出4~20ma电流信号,fpga开发板采集电流信号来判断齿轮是否转动;按下锁紧按钮26,产生一个上升沿信号发送至fpga开发板29,然后fpga开发板29向步进电动机驱动器21输出高电平,之后fpga开发板29持续输出脉冲信号给步进电机驱动器21,步进电动机驱动器21控制步进电动机1的转速,通过第一驱动齿轮与大齿轮啮合将步进电动机的转矩传递到卸压阀顶杆,使卸压阀阀芯锁死在阀套中心孔中,激光位移传感器检测不到大齿轮的位移量,fpga开发板停止向步进电动机驱动器发送信号,步进电动机停止转动,锁紧过程采用闭环控制;在fpga开发板提前设定好大齿轮的位移量,按下松开按钮25,产生一个上升沿信号发送至fpga开发板29,然后fpga开发板29向步进电动机驱动器21的输出低电平,之后fpga开发板29持续输出脉冲信号给步进电机驱动器,通过第一驱动齿轮与大齿轮啮合将步进电动机的转矩传递到卸压阀顶杆,使卸压阀阀芯松开阀套中心孔,系统内超高压压力瞬间释放,预先设定大齿轮的位移量越大,则阀芯和阀套的开口度越大,卸压的速度就越快;或者,再次按到松开按钮,松开过程会按照上面步骤重复动作一遍,从而增大阀芯和阀套的
开口度,提高卸压速度,整个松开过程为开环控制。
26.数显屏用于显示故障并报警,锁紧、松开动作出现故障,立即按下急停按钮28。转动把手91,可以实现自动卸压与手动卸压相互切换。
27.如图4所示,把手91在右侧,限位器51左侧的限位板将把手91的l形提升叉卡死,限制了提升杆55继续向下运动,提升叉的上连接孔92在提升叉的下连接93上面,第二驱动齿轮8和大齿轮5啮合,卸压方式处于手动卸压。把手91向左旋转180度,提升杆55带动支座11沿着平行轨道向上运动,第二驱动齿轮8和大齿轮5脱离,提升杆55及支座11在重力作用下有向下移动的趋势,此时,限位器51上端对把手91进行限位,限制提升杆55及支座11不能向下移动,第一驱动齿轮2和大齿轮5啮合,卸压方式处于自动卸压。
28.本实用新型的锁紧、松开动作简单可靠,操作者可以实现远程控制卸压阀的闭合、开启,卸压过程的安全性得到极大提高,并且手动卸压与自动卸压切换,为压力释放提供了可靠保障。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1