一种新型可跨井室承步式管道检测机器人的制作方法
本技术属于工业机器人,尤其涉及一种新型可跨井室承步式管道检测机器人。
背景技术:
1、现有的管道机器人通常采用主控制器与管道内的摄像爬行器通过电缆盘连接,操作人员通过操作主控制器上的键盘来控制爬行器在管道内的前进速度和方向,控制摄像头在管道内部的摄像方向、镜头焦距、灯光亮度等;拍摄的管道内部影像和其他参数则通过电缆传输到主控制器显示屏上,操作员可实时监测管道内部状况,但在实际使用中,由于井室底部往往低于管道底部,管道机器人无法直接行驶至井室下游的管道内部,因此机器人不得不在单段管道行走完成后原路返还,继而从相邻下游检查井进入下一段管道,这不仅严重影响管道机器人采集影响的速度及效率,同时反复下放及回收管道机器人会大大增加机器人受损的可能性。
技术实现思路
1、本实用新型的目的就在于提供一种新型可跨井室承步式管道检测机器人,该管道机器人在行进过程中可直接行驶至井室下游的管道内部,无需在单段管道行走完成后原路返还,从而提高了管道机器人采集影响的速度及效率,同时降低了机器人受损的可能性。
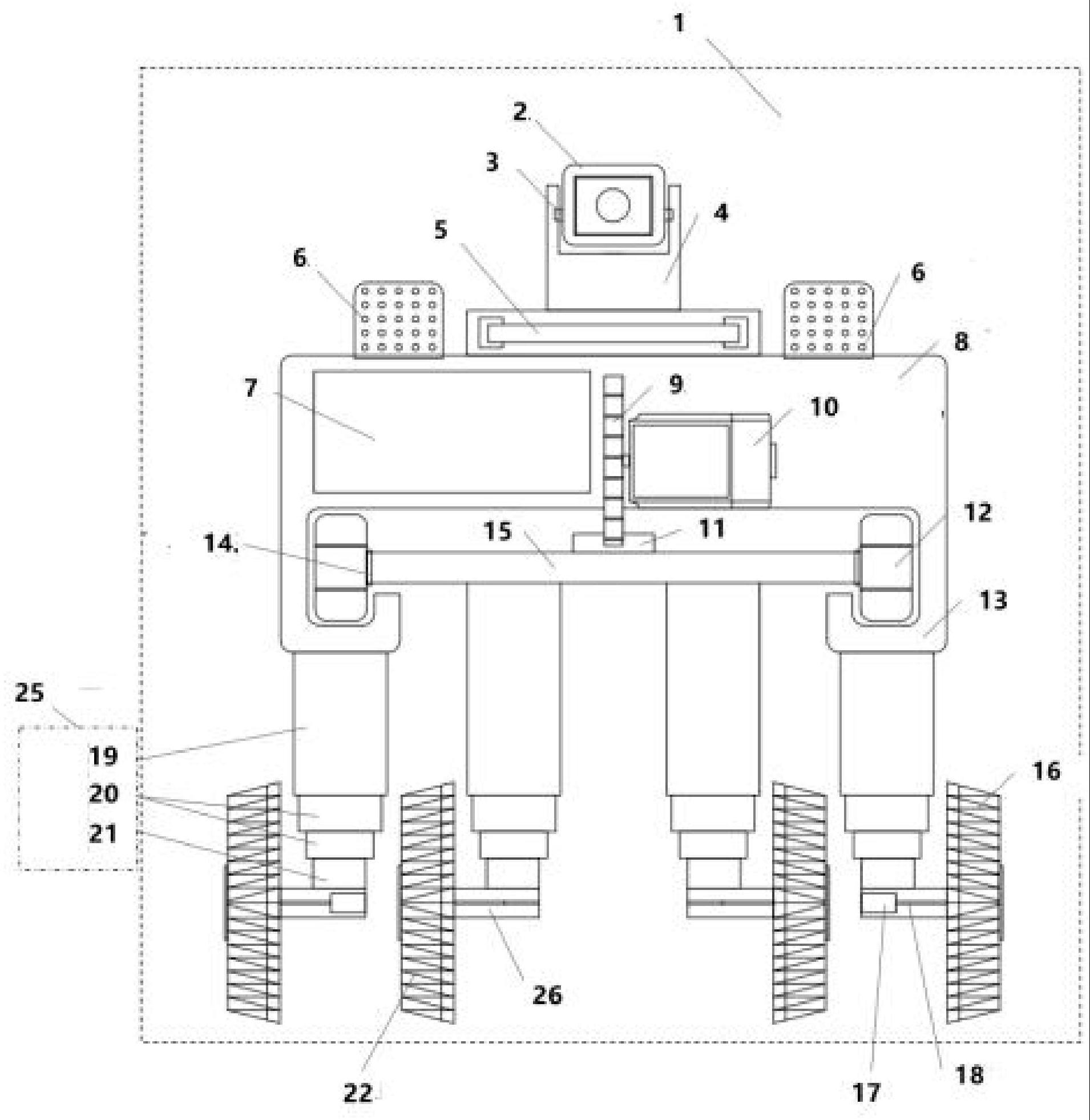
2、如上构思,本实用新型的技术方案是:一种新型可跨井室承步式管道检测机器人,包括管道机器人主体和安装在管道机器人主体上端的摄像头,所述摄像头与摄像头底座通过旋转连接轴固定连接,其特征在于:管道机器人主体包括上机腔与下机板,所述上机腔内部安装有液压油罐和腔内电机,底部安装伸缩装置一,所述腔内电机与齿轮通过电机轴连接,所述下机板设置在管道机器人主体中部,其两侧安装有板滑轮、上侧焊接有齿条、底部连接有伸缩装置二,所述齿条啮合连接齿轮,所述伸缩装置一和伸缩装置二与液压油罐连接。
3、优选地,所述摄像头底座与上机腔面焊接连接,且其前部装有防撞环。
4、优选地,所述防撞环通过防撞环转轴座与摄像头底座前部连接。
5、优选地,所述上机腔面焊接连接探照灯。
6、优选地,所述伸缩装置一由内部装有油泵的固定臂、伸缩臂及支撑臂组成,所述支撑臂底部连接有固定杆,所述固定杆内部安装机轮电机,所述机轮电机与外机轮通过机轮转轴连接。
7、优选地,所述伸缩装置二由内部装有油泵的固定臂、伸缩臂及支撑臂组成,所述支撑臂底部连接有固定杆,所述固定杆与内机轮通过机轮转轴连接。
8、优选地,所述板滑轮内嵌于轮槽。
9、优选地,所述上机腔内设置控制单元,所述摄像头、腔内电机、机轮电机、伸缩装置一和伸缩装置二均与控制单元电连接。
10、本实用新型管道机器人主体包括上机腔与下机板,且在上机腔底部和下机板底部均设有伸缩装置及内、外机轮,通过控制腔内电机的正反运行,可以实现上机腔与下机板的相对位移,再结合控制伸缩装置的长度变化,可以使得管道机器人直接行走于较大高差的空间,解决管道机器人在行进过程中无法直接行驶至井室下游的管道内部,不得不在单段管道行走完成后原路返还,继而从相邻下游检查井进入下一段管道从而造成的低效且设备易受损的问题,大大提升了管道检测机器人在井下的地形适应性及检测效率。
11、附图说明
12、图1为本实用新型的主视图;
13、图2为本实用新型的俯视图;
14、图3为本实用新型的侧视图;
15、图4-图8为本实用新型从上游管道进入井室时行走的情景图;
16、图9-图11为本实用新型从井室进入下游管道时行走的情景图。
技术特征:
1.一种新型可跨井室承步式管道检测机器人,包括管道机器人主体和安装在管道机器人主体上端的摄像头,所述摄像头与摄像头底座通过旋转连接轴固定连接,其特征在于:管道机器人主体包括上机腔与下机板,所述上机腔内部安装有液压油罐和腔内电机,底部安装伸缩装置一,所述腔内电机与齿轮通过电机轴连接,所述下机板设置在管道机器人主体中部,其两侧安装有板滑轮、上侧焊接有齿条、底部连接有伸缩装置二,所述齿条啮合连接齿轮,所述伸缩装置一和伸缩装置二与液压油罐连接。
2.根据权利要求1所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述摄像头底座与上机腔面焊接连接,且其前部装有防撞环。
3.根据权利要求2所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述防撞环通过防撞环转轴座与摄像头底座前部连接。
4.根据权利要求1所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述上机腔面焊接连接探照灯。
5.根据权利要求1所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述伸缩装置一由内部装有油泵的固定臂、伸缩臂及支撑臂组成,所述支撑臂底部连接有固定杆,所述固定杆内部安装机轮电机,所述机轮电机与外机轮通过机轮转轴连接。
6.根据权利要求1所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述伸缩装置二由内部装有油泵的固定臂、伸缩臂及支撑臂组成,所述支撑臂底部连接有固定杆,所述固定杆与内机轮通过机轮转轴连接。
7.根据权利要求1所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述板滑轮内嵌于轮槽。
8.根据权利要求1所述的一种新型可跨井室承步式管道检测机器人,其特征在于:所述上机腔内设置控制单元,所述摄像头、腔内电机、机轮电机、伸缩装置一和伸缩装置二均与控制单元电连接。
技术总结
一种新型可跨井室承步式管道检测机器人,包括管道机器人主体和安装在管道机器人主体上端的摄像头,所述摄像头与摄像头底座通过旋转连接轴固定连接。管道机器人主体包括上机腔与下机板,所述上机腔内部安装有液压油罐和腔内电机,底部安装伸缩装置一,所述腔内电机与齿轮通过电机轴连接,所述下机板设置在管道机器人主体中部,其两侧安装有板滑轮、上侧焊接有齿条、底部连接有伸缩装置二,所述齿条啮合连接齿轮,所述伸缩装置一和伸缩装置二与液压油罐连接。本技术在行进过程中可直接行驶至井室下游的管道内部,无需在单段管道行走完成后原路返还,从而提高了管道机器人采集影响的速度及效率,同时降低了机器人受损的可能性。
技术研发人员:崔诺,胡馨月,顾毅杰,刘洋
受保护的技术使用者:中国市政工程华北设计研究总院有限公司
技术研发日:20220818
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!