一种顶升关节用减速器的制作方法
本技术涉及机器人领域,具体是一种顶升关节用减速器。
背景技术:
1、在机器人顶升关节部位,由于减速比过大,需要用到减速器,但是现有的谐波减速器中的柔性齿轮的常规个数为200,刚齿轮的个数为202,柔性齿轮与刚齿轮的接触面较小,导致传动扭矩较小,而且柔轮的厚度较大,成本高,不便于推广。因此,本领域技术人员提供了一种顶升关节用减速器,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种顶升关节用减速器,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
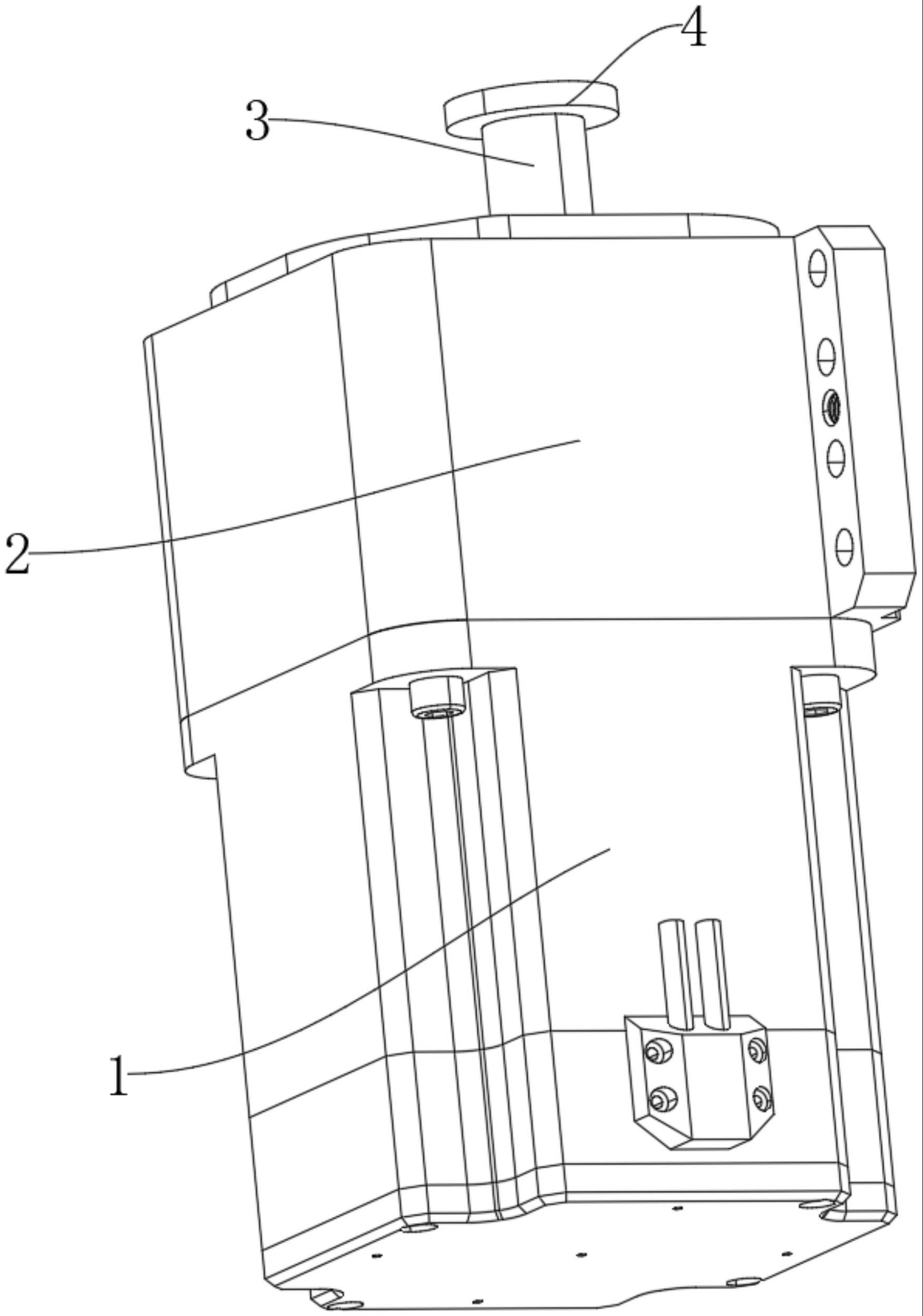
3、一种顶升关节用减速器,包括电机,所述电机的输出端设置有凸轮,所述凸轮外围设置有柔性轴承,所述凸轮以及所述柔性轴承一侧设置有端压盖,所述柔性轴承外围设置有柔轮,所述柔轮外围设置有刚轮,所述刚轮外围设置有轴承座,所述柔轮为凹字型结构,所述轴承座内部另一侧设置有深沟轴承,所述深沟轴承内孔部位设置有旋转套,所述旋转套外围设置有与所述轴承座通过螺钉连接的轴承端盖,所述旋转套一侧壁上安装有顶升连杆,所述旋转套另一端部与所述柔轮之间设置有柔轮固定螺钉,所述柔轮固定螺钉与所述柔轮之间压接有连接压圈。
4、作为本实用新型进一步的方案:所述柔轮外壁上一体成型有柔性齿轮,所述柔性齿轮的个数为320个,所述刚轮的内壁上开设内齿圈,且所述刚轮内壁上的内齿个数为322个,所述柔性齿轮与所述内齿圈啮合。
5、作为本实用新型进一步的方案:所述刚轮与所述轴承座一体成型,所述轴承座相对两侧壁上均开设有安装孔,所述轴承座与所述电机通过螺钉连接。
6、作为本实用新型进一步的方案:所述凸轮与所述电机的输出轴通过键连接,所述凸轮与所述端压盖通过螺钉连接,所述凸轮与所述柔轮通过所述柔性轴承转动连接。
7、作为本实用新型进一步的方案:所述深沟轴承有两个,且所述旋转套与所述轴承座通过所述深沟轴承转动连接,所述旋转套与所述顶升连杆固定连接,所述顶升连杆与随动盘转动连接。
8、作为本实用新型进一步的方案:所述旋转套与所述柔轮通过所述柔轮固定螺钉连接,所述压圈卡压在所述柔轮固定连接与所述柔轮之间。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型通过将柔轮外壁上的柔性齿轮柔轮从常规的200个改至320个,刚轮的内壁上的内齿从常规的202个改至322,使每个柔性轮齿和刚内齿的接触面从原来0.077789%升至0.094444%,速比从常规的100提升至160,最终使减速机传动更柔性更顺畅,间隙更小,可以无限接近零间隙传动,传动力矩更大,在材料不变的情况下使得此减速器的刚性更强,柔轮变薄而成本更低,便于推广。
技术特征:
1.一种顶升关节用减速器,包括电机(1),其特征在于:所述电机(1)的输出端设置有凸轮(9),所述凸轮(9)外围设置有柔性轴承(10),所述凸轮(9)以及所述柔性轴承(10)一侧设置有端压盖(8),所述柔性轴承(10)外围设置有柔轮(11),所述柔轮(11)外围设置有刚轮(14),所述刚轮(14)外围设置有轴承座(2),所述柔轮(11)为凹字型结构,所述轴承座(2)内部另一侧设置有深沟轴承(7),所述深沟轴承(7)内孔部位设置有旋转套(5),所述旋转套(5)外围设置有与所述轴承座(2)通过螺钉连接的轴承端盖(6),所述旋转套(5)一侧壁上安装有顶升连杆(3),所述旋转套(5)另一端部与所述柔轮(11)之间设置有柔轮(11)固定螺钉,所述柔轮(11)固定螺钉与所述柔轮(11)之间压接有连接压圈(12)。
2.根据权利要求1所述的一种顶升关节用减速器,其特征在于:所述柔轮(11)外壁上一体成型有柔性齿轮,所述柔性齿轮的个数为320个,所述刚轮(14)的内壁上开设内齿圈,且所述刚轮(14)内壁上的内齿个数为322个,所述柔性齿轮与所述内齿圈啮合。
3.根据权利要求1所述的一种顶升关节用减速器,其特征在于:所述刚轮(14)与所述轴承座(2)一体成型,所述轴承座(2)相对两侧壁上均开设有安装孔(201),所述轴承座(2)与所述电机(1)通过螺钉连接。
4.根据权利要求1所述的一种顶升关节用减速器,其特征在于:所述凸轮(9)与所述电机(1)的输出轴通过键连接,所述凸轮(9)与所述端压盖(8)通过螺钉连接,所述凸轮(9)与所述柔轮(11)通过所述柔性轴承(10)转动连接。
5.根据权利要求1所述的一种顶升关节用减速器,其特征在于:所述深沟轴承(7)有两个,且所述旋转套(5)与所述轴承座(2)通过所述深沟轴承(7)转动连接,所述旋转套(5)与所述顶升连杆(3)固定连接,所述顶升连杆(3)与随动盘(4)转动连接。
6.根据权利要求1所述的一种顶升关节用减速器,其特征在于:所述旋转套(5)与所述柔轮(11)通过所述柔轮(11)固定螺钉连接,所述压圈卡压在所述柔轮(11)固定连接与所述柔轮(11)之间。
技术总结
本技术公开了机器人领域的一种顶升关节用减速器,包括电机,所述电机的输出端设置有凸轮,所述凸轮外围设置有柔性轴承,所述凸轮以及所述柔性轴承一侧设置有端压盖,所述柔性轴承外围设置有柔轮,所述柔轮外围设置有刚轮,所述刚轮外围设置有轴承座,所述柔轮为凹字型结构。本技术通过将柔轮外壁上的柔性齿轮柔轮从常规的200个改至320个,刚轮的内壁上的内齿从常规的202个改至322,使每个柔性轮齿和刚内齿的接触面从原来0.077789%升至0.094444%,速比从常规的100提升至160,最终使减速机传动更柔性更顺畅,间隙更小,可以无限接近零间隙传动,传动力矩更大,在材料不变的情况下使得此减速器的刚性更强,柔轮变薄而成本更低,便于推广。
技术研发人员:杨平,柳建雄,何志雄,黄小华
受保护的技术使用者:广东天太机器人有限公司
技术研发日:20221027
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!