双锁级容错机电作动器的制作方法
本技术涉及用于对安全性和可靠性要求高的航空航天机电作动器,应用于机电作动器上的双端锁定、长行程收放结构的带上下位双端锁定多级机电作动器。
背景技术:
1、机电作动器不仅在航空航天飞行器中得到普遍应用,同时还可在航海及其他国防、民用领域大型机器人手臂的驱动、大型工程机械驱动、车辆主动悬架系统等方面得到广泛应用。机电作动器ema伴随着航空航天发展起来,并逐渐渗透到其他各个领域。ema是一种机电一体化装置,将伺服控制器/驱动器的输出指令信号转变为速度、位移、载荷等机械量,以实现对控制对象速度驱动、位移驱动和载荷驱动。机电作动器作为一种直线运动执行元件,是用来实现工作机构直线往复运动或小于360°摆动运动的能量转换装置。通常情况下,机电作动器主要由驱动器、驱动电机、减速箱减速齿轮、滚珠丝杠、滚珠丝杠副传动部件、检测反馈及负载作动器外筒组件、活塞杆组件、自锁定组件、检测反馈位置检测元件及负载等部件构成。它通过控制执行机构的运行来间接或直接地控制目标运动。受技术和材料的限制,ema的功率比较小,驱动器由模拟电子器件构成,执行机构主要采用有刷直流电动机,传动装置采用滚珠丝杠。目前机电作动器传动机构存在刚体数目多、传动链长的问题。随着负载转动惯量增加,惯性负载及自身传动机构产生的动载效应明显。现有技术机电作动器通常一端的作动杆铰接下支耳与摇臂,另一端连接齿轮减速箱,旁侧设置永磁同步电机的电机轴穿过所述齿轮减速箱连接至锁定装置:永磁同步电机通过齿轮减速箱带动机电作动器中的滚珠丝杠副运动,以实现作动杆的直线伸缩。其工作原理是根据控制器的输出信号,向被控对象或系统施加控制动作,按照所需方式输出力,改变控制对象或系统的响应。由于单电机双余度工作方式,某些原因使得一台电机完全不能工作,只有一台电机来完成任务,此时输出转矩为正常工作方式的50%,系统性能明显变差,不能完成任务。ema系统在容错工作状态下,原故障通道输出的功率必须由其他正常的通道分担,即进行功率的重新分配,对于转矩综合系统而言为转矩的重新分配。这种重新分配会导致电动机与逆变器的功率损耗的增加,还会对机械装置产生影响。现有技术带有自锁装置的机电作动器,在限定位置停止运动时能防止外力作用而发生窜动,通常由作动筒内的机械锁锁住。机械锁的形式常用的为钢球锁,它由钢球、锁槽、锥形活塞和弹簧等组成。
2、在某些安装空间受限或工作行程要求较长的应用场合,例如飞机起落架收放、舱门收放等,常用的单级机电作动器因整体死结构长度较长而无法满足有限的安装空间要求,虽然可以通过多级机电作动器实现大工作行程收放,但常规的多级机电作动器仍采用制动器抱死电机轴的方式实现机械锁定,可靠性差,较机械锁承载能力低,因而实用性较差。
技术实现思路
1、本实用新型是提供一种结构简单,安装空小,过载能力高,具有高可靠安全性、效率高、容错性强、寿命长,能够实现大工作行程并可靠锁定活塞杆的双锁级容错机电作动器方案。有效解决常规多级机电作动器锁定能力差的难题。
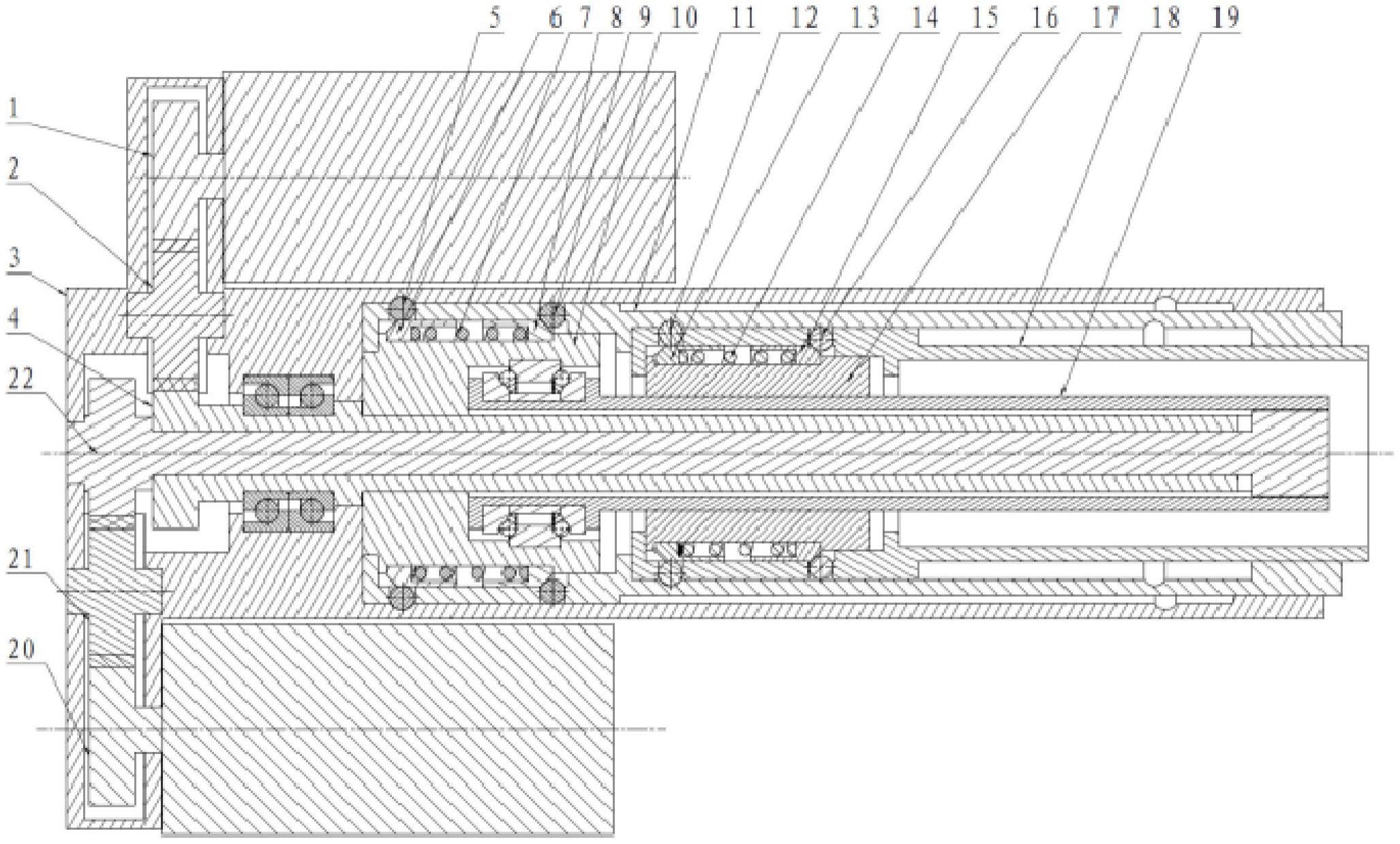
2、本实用新型解决其技术问题所采用的技术方案是:一种双锁级容错机电作动器,包括:将作动器外筒3径向两侧对称主电机1、副电机20旋转运动转化为传动腔体中减速器分别联动的主丝杠4、花键套传动轴22和花键套合副丝杠19机械能的齿轮系驱动单元,以及在作动器外筒3缸体中作伸缩运动的一级活塞筒11,其特征在于:主电机1、副电机20两台电机在经过齿轮系驱动单元,花键套传动轴22套合主丝杠4,主丝杠螺母10设有控制落锁在一级活塞筒11活塞头上位锁槽中,在外筒底部内壁锁环槽中滚动锁止的一级上位钢球5和落锁在下位锁槽中,沿外筒内壁末端锁环槽滚动的一级下位钢球9实现上锁、解锁的第一级上下位锁定装置;副丝杠螺母17设有控制落锁在二级活塞筒18活塞头上位锁槽中,在二级活塞筒18内壁锁环槽中滚动锁止的二级上位钢球12和落锁在下位锁槽中,沿二级上位钢球12内壁末端锁环槽滚动的二级下位钢球16实现上锁、解锁的第二级上下位锁定装置,两级上下位锁定装置分别在主丝杠螺母10、副丝杠螺母17带动下驱动一级活塞筒11、二级活塞筒18在作动器外筒3、一级活塞筒11运动腔体中作两-两电气余度容错通道的伸缩运动。
3、本实用新型相比于现有技术具有如下增益效果:
4、本实用新型将作动器外筒3径向两侧对称主电机1、副电机20旋转运动转化为传动腔体中减速器分别联动主丝杠4、花键套传动轴22花键套合副丝杠19机械能的齿轮系驱动单元,以及在作动器外筒3缸体中作伸缩运动的一级活塞筒11,可减少作动器体积和尺寸,提高带锁定功能机电作动器对安装空间的适应能力。不仅安装空小,过载能力高,而且可使承载能力和刚性大幅度提高;能够避免目前机电作动器传动机构存在刚体数目多、传动链长的问题。由于每台双绕组电动机采用两套功率电路驱动,首先形成了电气上的双余度结构,两台电机在将伺服控制器/驱动器的输出指令信号转变为速度、位移、载荷等机械量,经过齿轮传动系,又形成机械上的双余度结构,使得整个系统具有四个电气通道、两个电机通道的两-两余度结构。因此在电气通道中有“故障-工作,故障-工作”的容错能力。在动态和稳态性能以及抗干扰能力方面均得到较大提升,稳态误差减小70%以上,干扰时位移偏差减小60%多。当任意一台电机故障时作动器仍然能够完成飞行任务。电动机都处于工作状态,正常工作方式。系统无故障时4个电气通道、两台电动机都处于工作状态,每台电机输出一半功率。当其中一台电机有一个电气通道因故障而不能工作时,该电机采用单通道工作模式,而另一台电机为双通道工作模式,整个系统为双电机3通道工作状态。如果两台电机均有一路电气通道故障而不能工作,则每台电机都处于单通道工作模式,系统为双电机双通道工作状态。
5、本实用新型采用主电机1、副电机20两台电机在经过齿轮系驱动单元,花键套传动轴22套合主丝杠4,主丝杠4通过带有第一级上下位锁定装置的主丝杠螺母10,驱动副丝杠19形成机械上两个电机通道驱动的双余度电气通道,可以根据实际应用环境,采用作动器非相似多余度设计,可实现控制、驱动、反馈等多类型余度设计。单台伺服电机驱动完成多个功能执行动作,实现各动作互锁功能。提高了安全性和可靠性。
6、本实用新型过在作动器外筒3与一级活塞筒11之间设计可开锁、上锁的一级上位钢球5机械锁和一级下位钢球9机械锁,主电机1可驱动一级活塞筒11锁定在作动器外筒3上下端位置并可靠解锁;在一级活塞筒11与二级活塞筒18之间设计可开锁、上锁的二级上位钢球12机械锁和二级下位钢球16机械锁,副电机20可驱动二级活塞筒18锁定在一级活塞筒11上下端位置并可靠解锁,从而以机械锁的方式在伸出、缩回位置锁定活塞杆,能够实现大工作行程并可靠锁定活塞杆。两级上下位锁定装置上的双端锁定、多级长行程收放结构,可以在规定行程下大幅减小带锁定结构长度,解决常规多级机电作动器以制动器抱死电机轴而无法承受大载荷的难题。
技术特征:
1.一种双锁级容错机电作动器,包括:将作动器外筒(3)径向两侧对称主电机(1)、副电机(20)旋转运动转化为传动腔体中减速器分别联动的主丝杠(4)、花键套传动轴(22)和花键套合副丝杠(19)机械能的齿轮系驱动单元,以及在作动器外筒(3)缸体中作伸缩运动的一级活塞筒(11),其特征在于:主电机(1)、副电机(20)两台电机在经过齿轮系驱动单元,花键套传动轴(22)套合主丝杠(4),主丝杠螺母(10)设有控制落锁在一级活塞筒(11)活塞头上位锁槽中,在外筒底部内壁锁环槽中滚动锁止的一级上位钢球(5)和落锁在下位锁槽中,沿外筒内壁末端锁环槽滚动的一级下位钢球(9)实现上锁、解锁的第一级上下位锁定装置;副丝杠螺母(17)设有控制落锁在二级活塞筒(18)活塞头上位锁槽中,在二级活塞筒(18)内壁锁环槽中滚动锁止的二级上位钢球(12)和落锁在下位锁槽中,沿二级上位钢球(12)内壁末端锁环槽滚动的二级下位钢球(16)实现上锁、解锁的第二级上下位锁定装置,两级上下位锁定装置分别在主丝杠螺母(10)、副丝杠螺母(17)带动下驱动一级活塞筒(11)、二级活塞筒(18)在作动器外筒(3)、一级活塞筒(11)运动腔体中作两-两电气余度容错通道的伸缩运动。
2.如权利要求1所述的双锁级容错机电作动器,其特征在于:主丝杠(4)通过带有第一级上下位锁定装置的主丝杠螺母(10),驱动副丝杠(19)形成机械上两个电机通道驱动的双余度电气通道,装配在主丝杠螺母(10)中空盲孔中的推力角接触球轴承环约束副丝杠(19),通过带有第二级上下位锁定装置的副丝杠螺母(17),带动被一级活塞筒(11)止挡隔环隔离的二级活塞筒(18)在一级活塞筒(11)作伸缩运动,一级活塞筒(11)在作动器外筒(3)运动腔体中作伸缩运动,使得整个电作动器系统具有两-两电气余度容错通道。
3.如权利要求1所述的双锁级容错机电作动器,其特征在于:工作时,主电机(1)通过主传动齿轮(2)驱动主丝杠(4)转动,带动一级活塞筒(11)沿作动器外筒(3)运动腔伸出,第一级上下位锁定装置推动一级上位锁衬套(6)右移,一级上位钢球(5)脱离作动器外筒(3)活塞头内壁环面上位锁槽脱出,主丝杠螺母(10)右端面台阶推动一级活塞筒(11)伸出作动器外筒(3)运动腔,实现一级活塞筒(11)机械锁解锁。
4. 如权利要求1所述的双锁级容错机电作动器,其特征在于:副电机(20)通过副传动齿轮(21)驱动花键套传动轴(22)轴端齿轮旋转,带动副丝杠(19) 同步旋转,通过副丝杠(19)啮合副丝杠螺母(17),带动二级活塞筒(18)沿一级活塞筒(11)运动腔伸出,第二级上下位锁定装置驱动二级上位锁衬套(13)右移,二级上位钢球(12)脱离二级活塞筒(18)内壁环面上位锁槽脱出,副丝杠螺母(17)右端面推动二级活塞筒(18)伸出一级活塞筒(11)运动腔,实现二级活塞筒(18)机械锁解锁。
5.如权利要求1所述的双锁级容错机电作动器,其特征在于:齿轮系驱动单元包括:通过主电机(1)输出轴伸入作动器外筒(3)传动腔体中齿轮啮合主传动齿轮(2)带主丝杠(4)旋转的端向齿轮传动系,以及副电机(20)输出轴齿轮通过副传动齿轮(21)啮合花键套传动轴(22)的端向齿轮传动系;传动系具有多个传递给多个互联齿轮输出端相互联接的齿轮。
6.如权利要求1所述的双锁级容错机电作动器,其特征在于:安装在作动器外筒(3)中空台阶孔中的推力角接触球轴承内环轴向限位在主丝杠(4)缩颈环端台阶轴上,承受主丝杠(4)的负载;安装在主丝杠螺母(10)中空台阶孔中的双向推力角接触球轴承内环轴向限位在副丝杠(19)上端台阶轴上,承受副丝杠(19)的负载。
7.如权利要求1所述的双锁级容错机电作动器,其特征在于:第一级上下位锁定装置包括:装配在一级活塞筒(11)活塞头外环面母线方向上落锁在作动器外筒(3)筒壁上位钢球导向孔与活塞头外环面导向锁孔中的一级上位钢球(5),与锁定在落锁在活塞头外环面导向锁孔中的一级下位钢球(9),以及紧贴活塞头中空台阶孔壁,相向对称将一级锁定弹簧(7)约束在主丝杠螺母(10)缩颈凹槽两端面的一级上位锁衬套(6)、一级下位锁衬套(8)。
8.如权利要求1所述的双锁级容错机电作动器,其特征在于:第二级上下位锁定装置包括:装配在二级活塞筒(18)活塞头外环面母线方向上落锁在一级活塞筒(11)筒壁上位钢球导向孔与活塞头外环面导向锁孔中的二级上位钢球(12),与锁定在落锁在二级活塞头外环面导向锁孔中的二级下位钢球(16),以及紧贴二级活塞头中空台阶孔壁,相向对称将二级锁定弹簧(14)约束在副丝杠螺母(17)缩颈凹槽两端面的二级上位锁衬套(13)、二级下位锁衬套(15)。
9.如权利要求1所述的双锁级容错机电作动器,其特征在于:一级活塞筒(11)运动至作动器外筒(3)极限位置,一级下位钢球(9)与作动器外筒(3)筒壁下位钢球导向孔相对,在一级锁定弹簧(7)弹力作用下,一级下位锁衬套(8)将一级下位钢球(9)推至一级下位导向锁孔,卡入一级下位锁衬套(8)下端切角斜面,限制一级下位钢球(9)窜动,实现一级下位钢球(9)机械锁锁定,从而锁定一级活塞筒(11)。
10.如权利要求1所述的双锁级容错机电作动器,其特征在于:二级活塞筒(18)运动至一级活塞筒(11)下端极限位置,二级下位钢球(16)与一级活塞筒(11)筒壁下位钢球导向孔相对,在二级锁定弹簧(14)弹力作用下,二级下位锁衬套(15)将二级下位钢球(16)推至二级下位导向锁孔,卡入二级下位锁衬套(15)下端切角斜面下端切角斜面,限制二级下位钢球(16)窜动,实现二级下位钢球(16)机械锁定,从而锁定二级活塞筒(18)。
技术总结
本技术提出的一种双锁级容错机电作动器,效率高、容错性强。能够通过下述技术方案实现:主丝杠螺母设有控制落锁在一级活塞头上位锁槽中,在外筒底部内壁锁环槽中滚动锁止的一级上位钢球和落锁在下位锁槽中,沿外筒内壁末端锁环槽滚动的一级下位钢球实现上锁、解锁的第一级上下位锁定装置;副丝杠螺母设有控制落锁在二级活塞头上位锁槽中,在二级活塞筒内壁锁环槽中滚动锁止的二级上位钢球和落锁在下位锁槽中,沿二级上位钢球内壁末端锁环槽滚动的二级下位钢球实现上锁、解锁的第二级上下位锁定装置,两级上下位锁定装置分别在主、副丝杠螺母带动下驱动一、二级活塞筒在作动器外筒、一级活塞筒运动腔体中作两‑两电气余度容错通道的伸缩运动。
技术研发人员:郭智,匡克焕,鲜子衿,邹波
受保护的技术使用者:四川凌峰航空液压机械有限公司
技术研发日:20221225
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!