可调节导流管及机器人的制作方法
本技术涉及机器人,特别是涉及一种可调节导流管及机器人。
背景技术:
1、市面上出现的泳池清洁机器人多以轴流水泵居多,现有的泳池清洁机器人有池底清洁模式和爬壁清洁模式,而轴流泵的出水导流方向对机器人在水下爬壁行走有着巨大的影响。市面上绝大数机器人出水导流方向无法调节,而且在导流方式上也没有进行二次水利增幅来增加水利效率。
技术实现思路
1、本实用新型的目的是提供一种可调节导流管及机器人,结构简单紧凑,可以调节出水端的方向,进而调节出水导流的方向,满足机器人的不同作业情况,并且可以对增加水利利用率。
2、为了解决上述技术问题,本实用新型提供一种可调节导流管,包括:
3、管体,所述管体具有出水端和进水端;
4、调节板,所述调节板开设有与所述出水端对应的调节滑孔;所述调节板开设有调节槽;
5、调节组件,所述调节组件可滑动的安装于所述调节槽,所述调节组件与所述出水端连接;
6、其中,所述调节组件沿所述调节槽滑动,带动所述出水端于所述调节滑孔内滑动。
7、根据上述的可调节导流管,本实用新型至少具有以下有益效果:
8、本实用新型的可调节导流管设置调节板,通过在调节板开设调节滑孔,调节滑孔与出水端对应设置,出水端可以沿着调节滑孔滑动;并且调节板开设有调节槽,可以通过调节组件沿着调节槽滑动,带动出水端沿调节滑孔滑动,进而调节出水导流的方向,满足机器人的不同作业情况;同时可以根据机器人的运动方向,调节出水方向,进而利用出水的反作用力推动机器人运动,提高水利利用率。
9、可选地,所述可调节导流管还包括基罩,所述基罩与所述进水端连接;所述基罩远离所述进水端的一端向外延伸呈喇叭型结构。
10、可选地,所述可调节导流管还包括导叶,所述导叶安装于所述基罩的内部。
11、可选地,所述调节板呈弧形结构,所述调节板的弧度为60~90°。
12、可选地,所述调节滑孔呈长圆孔结构,且所述调节滑孔沿所述调节板的长轴方向设置。
13、可选地,所述调节槽和所述调节组件分别设置有两个,所述调节槽一一对应设置于所述调节滑孔的两侧;所述调节组件与所述调节槽一一对应设置。
14、可选地,所述调节组件为调节螺钉,所述调节螺钉包括螺杆和螺帽,所述螺杆可滑动的插设于所述调节槽,所述螺杆的一端与所述出水端连接,所述螺杆的另一端与所述螺帽连接;所述螺帽抵接于所述调节板。
15、可选地,所述调节组件还包括阻水挡板,所述阻水挡板开设有通孔和螺孔;所述出水端插设于所述通孔,所述螺杆插设于所述螺孔。
16、可选地,所述调节板的两端设置有滑动槽,所述阻水挡板的两端一一对应插设于所述滑动槽。
17、本实用新型还提供一种机器人,包括如上述任一项所述的可调节导流管。
18、本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。
技术特征:
1.一种可调节导流管,其特征在于,包括:
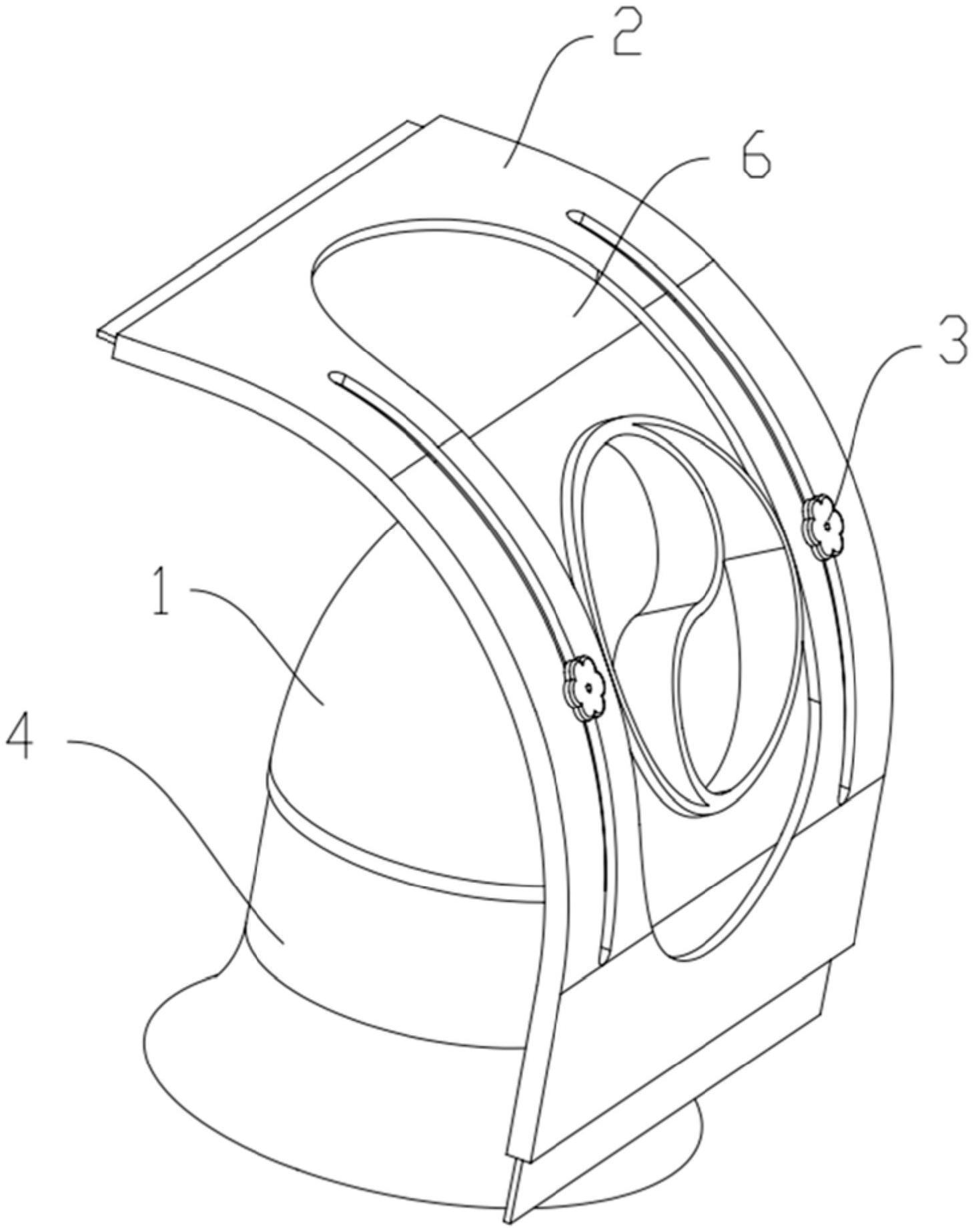
2.如权利要求1所述的可调节导流管,其特征在于:所述可调节导流管还包括基罩(4),所述基罩(4)与所述进水端(12)连接;所述基罩(4)远离所述进水端(12)的一端向外延伸呈喇叭型结构。
3.如权利要求2所述的可调节导流管,其特征在于:所述可调节导流管还包括导叶(5),所述导叶(5)安装于所述基罩(4)的内部。
4.如权利要求1所述的可调节导流管,其特征在于:所述调节板(2)呈弧形结构,所述调节板(2)的弧度为60~90°。
5.如权利要求4所述的可调节导流管,其特征在于:所述调节滑孔(21)呈长圆孔结构,且所述调节滑孔(21)沿所述调节板(2)的长轴方向设置。
6.如权利要求1所述的可调节导流管,其特征在于:所述调节槽(22)和所述调节组件(3)分别设置有两个,所述调节槽(22)一一对应设置于所述调节滑孔(21)的两侧;所述调节组件(3)与所述调节槽(22)一一对应设置。
7.如权利要求1所述的可调节导流管,其特征在于:所述调节组件(3)为调节螺钉(31),所述调节螺钉(31)包括螺杆和螺帽,所述螺杆可滑动的插设于所述调节槽(22),所述螺杆的一端与所述出水端(11)连接,所述螺杆的另一端与所述螺帽连接;所述螺帽抵接于所述调节板(2)。
8.如权利要求7所述的可调节导流管,其特征在于:所述调节组件(3)还包括阻水挡板(6),所述阻水挡板(6)开设有通孔(61)和螺孔;所述出水端(11)插设于所述通孔(61),所述螺杆插设于所述螺孔。
9.如权利要求8所述的可调节导流管,其特征在于:所述调节板(2)的两端设置有滑动槽,所述阻水挡板(6)的两端一一对应插设于所述滑动槽。
10.一种机器人,其特征在于:包括如权利要求1-9任一项所述的可调节导流管。
技术总结
本技术涉及机器人技术领域,具体提供了一种可调节导流管及机器人,可调节导流管包括管体、调节板以及调节组件,所述管体具有出水端和进水端;所述调节板开设有与所述出水端对应的调节滑孔;所述调节板开设有调节槽;所述调节组件可滑动的安装于所述调节槽,所述调节组件与所述出水端连接;所述调节组件沿所述调节槽滑动,带动所述出水端于所述调节滑孔内滑动。本技术结构简单紧凑,可以调节出水端的方向,进而调节出水导流的方向,满足机器人的不同作业情况,并且可以对增加水利利用率。
技术研发人员:高建歌,郑承栋
受保护的技术使用者:佛山市顺德区一拓电气有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!