用于阀门容器内部检测的软杆式磁轮吸附机器人的制作方法
本发明涉及管道检测机器人,具体而言,涉及一种用于阀门容器内部检测的软杆式磁轮吸附机器人。
背景技术:
1、目前,用于管道检测的机器人主要基于支撑管壁结构的刚性机器人,参考专利号为202222211140.6,名称为一种管道检测机器人的实用新型专利,以及申请公布号为cn114923062a,名称为自适应攀爬管道巡检机器人的发明专利申请。
2、基于支撑管壁结构的刚性机器人具有庞大的机械本体,较低的自由度,限制了其进入阀门或罐型容器等复杂空间中进行探测。对容器内部进行检测需要经过一段铸铁材质的法兰截止阀通道,阀门出入口直径为100~150mm,如果使用基于支撑管壁结构的刚性机器人,则难以顺利通过法兰截止阀门内部两个连续的弯道。此外基于支撑管壁结构的刚性机器人难以适应不同直径的管道。
技术实现思路
1、本发明就是为了解决现有用于管道检测的基于支撑管壁结构的刚性机器人自由度低,难以适应不同直径的管道,难以顺利通过法兰截止阀门内部两个连续的弯道的技术问题,提供一种灵活性高、柔顺性高、活动自由度高,适用于不同直径的管道的用于阀门容器内部检测的软杆式磁轮吸附机器人。
2、根据法兰截止阀的特点,设计一种依靠永磁体吸附在管道内壁且具有主动俯仰和偏航能力的柔顺机器人。
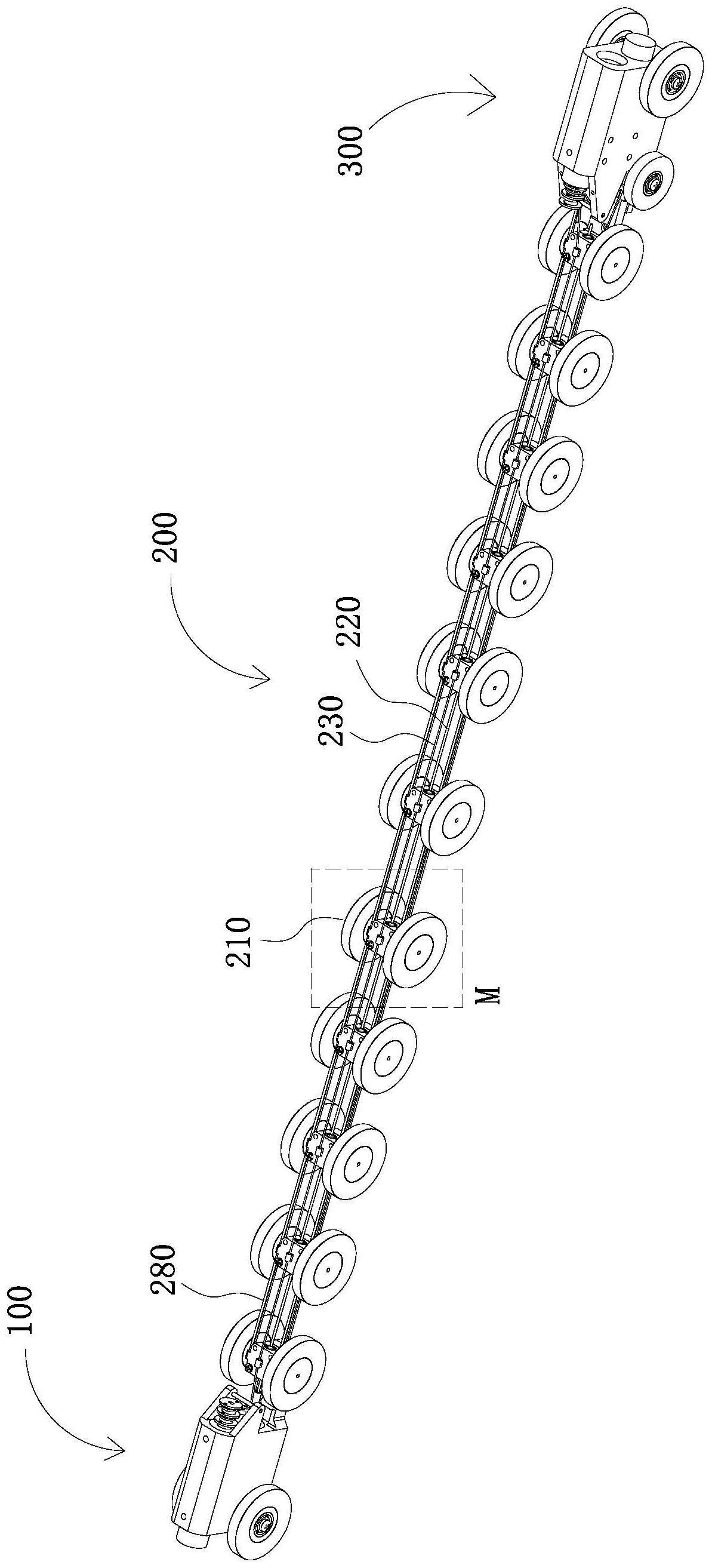
3、本发明提供一种用于阀门容器内部检测的软杆式磁轮吸附机器人,包括前肢、躯干和后肢;
4、躯干包括柔性杆、上拉线、下拉线、左拉线、右拉线以及多个关节;
5、关节包括关节驱动装置、左磁轮和右磁轮,关节驱动装置包括上壳体、中壳体、下壳体、前轴承、后轴承、蜗杆、涡轮、转轴、左轴承和右轴承,上壳体与中壳体固定连接,下壳体与中壳体固定连接,上壳体和中壳体之间连接部位设有前侧轴承室、后侧轴承室,前轴承位于前侧轴承室中,后轴承位于后侧轴承室中,蜗杆的前端与前轴承的连接,蜗杆的后端与后轴承连接,蜗杆位于上壳体和中壳体形成的腔室内,蜗杆设有轴向中心通孔;中壳体与下壳体之间连接部位设有左轴承室、右轴承室,左轴承位于左轴承室中,右轴承位于右轴承室中,转轴的左部分与左轴承连接,转轴的右部分与右轴承连接,涡轮与转轴固定连接,涡轮位于中壳体和下壳体形成的腔室内;蜗杆与涡轮啮合;上壳体的顶部设有上拉线穿孔,上壳体的左侧设有左拉线穿孔,上壳体的右侧设有右拉线穿孔,下壳体的底部设有下拉线穿孔;左磁轮与转轴的左端连接,右磁轮与转轴的右端连接;
6、柔性杆穿过蜗杆的轴向中心通孔并固定住,柔性杆依次穿过每个关节中关节驱动装置的蜗杆;
7、上拉线依次穿过每个关节中关节驱动装置的上拉线穿孔,下拉线依次穿过每个关节中关节驱动装置的下拉线穿孔;左拉线依次穿过每个关节中关节驱动装置的左拉线穿孔,左拉线的前端固定在第一个关节中关节驱动装置的左拉线穿孔处;右拉线依次穿过每个关节的关节驱动装置的右拉线穿孔,右拉线的前端固定在第一个关节中关节驱动装置的右拉线穿孔处;
8、前肢包括前电机座、前俯仰电机、前俯仰绕线轮、主轴电机、左前磁轮、右前磁轮、第一张紧轴、第二张紧轴和固定板,左前磁轮与前电机座的左侧连接,右前磁轮与前电机座的右侧连接,前俯仰电机与前电机座连接,前俯仰绕线轮与前俯仰电机的输出轴连接,主轴电机与前电机座连接,主轴电机位于前俯仰电机的下方,第一张紧轴、第二张紧轴分别与前电机座的后端连接,第一张紧轴位于第二张紧轴的上方;前俯仰绕线轮设有第一绕线槽、第二绕线槽,固定板与前电机座的底部固定连接,固定板设有通道;
9、第一个关节中关节驱动装置的下壳体与前肢的固定板固定连接,柔性杆的前端与主轴电机的输出轴固定连接,上拉线的前端先绕过第一张紧轴,再缠绕在前俯仰绕线轮的第一绕线槽中;下拉线的前端先穿过固定板的通道,再绕过第二张紧轴,然后缠绕在前俯仰绕线轮的第二绕线槽中;下拉线在第二绕线槽中缠绕的方向与上拉线在第一绕线槽中缠绕的方向相反;
10、后肢包括后电机座、后俯仰绕线轮、基座、左后磁轮、右后磁轮、后俯仰电机、偏转电机、偏转绕线轮、第三张紧轴、第四张紧轴、第五张紧轴和第六张紧轴,左后磁轮与后电机座的左侧连接,右后磁轮与后电机座的右侧连接,后俯仰电机与后电机座连接,偏转电机与后电机座连接,后俯仰电机位于偏转电机的上方,后俯仰绕线轮与后俯仰电机的输出轴连接,偏转绕线轮与偏转电机的输出轴连接;基座与后电机座的底部连接,基座设有通道,第三张紧轴、第五张紧轴、第六张紧轴分别与后电机座的前端连接,第四张紧轴与基座的通道连接,第五张紧轴和第六张紧轴位于偏转绕线轮的两侧;
11、最后一个关节中关节驱动装置的下壳体与后肢的基座固定连接;上拉线的后端先绕过第三张紧轴,再缠绕在后俯仰绕线轮的第一绕线槽中;下拉线的后端先穿过基座的通道,再绕过第四张紧轴,然后缠绕在后俯仰绕线轮的第二绕线槽中;下拉线在后俯仰绕线轮的第二绕线槽中缠绕的方向与下拉线在后俯仰绕线轮的第一绕线槽中缠绕的方向相反;左拉线的后端先绕过第五张紧轴再缠绕在偏转绕线轮的第一绕线槽中,右拉线的后端先绕过第六张紧轴再缠绕在偏转绕线轮的第二绕线槽中,左拉线在偏转绕线轮的第一绕线槽中缠绕方向与右拉线在偏转绕线轮中第二绕线槽中缠绕方向相反。
12、优选地,上拉线由上拉线前部分和上拉线后部分组成,上拉线前部分的后端固定在多个关节的中间一个关节的上拉线穿孔中,上拉线后部分的前端固定在多个关节的中间一个关节的上拉线穿孔中;下拉线由下拉线前部分和下拉线后部分组成,下拉线前部分的后端固定在多个关节的中间一个关节的下拉线穿孔中,下拉线后部分的前端固定在多个关节的中间一个关节的下拉线穿孔中。
13、本发明的有益效果是,体积小、质量轻,运动灵活,控制简单可靠,能够主动改变形态并通过法兰截止阀的两个连续弯道。能够适应不同直径的管道。
14、本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
技术特征:
1.一种用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,包括前肢、躯干和后肢;
2.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述柔性杆与蜗杆的轴向中心通孔用胶水进行固定。
3.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述前肢还包括轴套,所述轴套与主轴电机的输出轴连接,所述柔性杆的前端与轴套固定连接。
4.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述柔性杆的截面为圆形。
5.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述柔性杆的材质是镍钛合金、不锈钢或弹簧钢。
6.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述后肢中后电机座的左侧、右侧分别连接有左过渡轮、右过渡轮。
7.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述躯干还包括左抗扭丝、右抗扭丝,所述关节驱动装置中上壳体的左侧设有左抗扭丝穿孔,上壳体的右侧设有右抗扭丝穿孔;
8.根据权利要求9所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于,所述左抗扭丝和右抗扭丝的材质是镍钛合金、不锈钢或弹簧钢。
9.根据权利要求1所述的用于阀门容器内部检测的软杆式磁轮吸附机器人,其特征在于:
10.一种用于阀门容器内部检测的软杆式吸附机器人,其特征在于,包括前肢、躯干和后肢;
技术总结
本发明涉及一种用于阀门容器内部检测的软杆式磁轮吸附机器人,其解决了现有用于管道检测的基于支撑管壁结构的刚性机器人自由度低,难以适应不同直径的管道,难以顺利通过法兰截止阀门内部两个连续的弯道的技术问题;其包括前肢、躯干和后肢,躯干包括柔性杆、上拉线、下拉线、左拉线、右拉线以及多个关节,关节包括关节驱动装置、左磁轮和右磁轮,前肢中主轴电机通过柔性杆驱动每一个关节,上拉线、下拉线分别穿过每一个关节,上拉线、下拉线的前端与前肢的前俯仰绕线轮连接,上拉线、下拉线的后端与后肢的后俯仰绕线轮连接,左拉线、右拉线分别穿过每一个关节,左拉线、右拉线的后端与后肢中的偏转绕线轮连接。本发明广泛用于法兰截止阀、管道的检测。
技术研发人员:臧家林,王颢森,赵建文,吴起,张福海,王欣,昌正科
受保护的技术使用者:核电运行研究(上海)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!