一种管道机器人
本发明涉及机器人的,特别是涉及一种管道机器人。
背景技术:
1、管道在石油、天然气、化工原料及市政给排水工程等各个方面发挥着重要作用。在线运行管道随着使用时间的增长,会出现各种问题,如腐蚀、裂缝、淤积等,对管道的正常使用会产生严重的影响。为了提高管道的使用效率和延长管道的寿命,需要对在线运行管道进行定期的检测或其它作业。检测装置自身无法进入管道,现有的技术中,最常用的是通过机器人进入到管道内部,运用各种无损检测方法对管道进行检测。管道机器人作为一种管道内移动的智能载体,通常可携带各种检测设备或作业工具。近年来,随着研究的不断深入,管道机器人的发展进入崭新的阶段,主要应用在石油、化工、天然气及核工业等领域中,完成检测探伤、清理和维护管道的工作。
2、目前管道机器人结构复杂,需要特定的传动机构,如采用车轮或履带作为驱动部件,导致机器人体积较大。而有的管道机器人采用谐振原理驱动,由微型电机带动偏心轮旋转作为激励源,利用柔性足与管壁碰撞产生向前运动趋势,简化了传动机构。但是靠柔性足支撑管壁,不能适用多种不同直径的管道,且运动速度缓慢。
技术实现思路
1、基于此,本发明克服现有技术的缺点和不足,提供一种管道机器人,以适应多种不同直径管道的检测需求。
2、本发明提供一种管道机器人,包括:
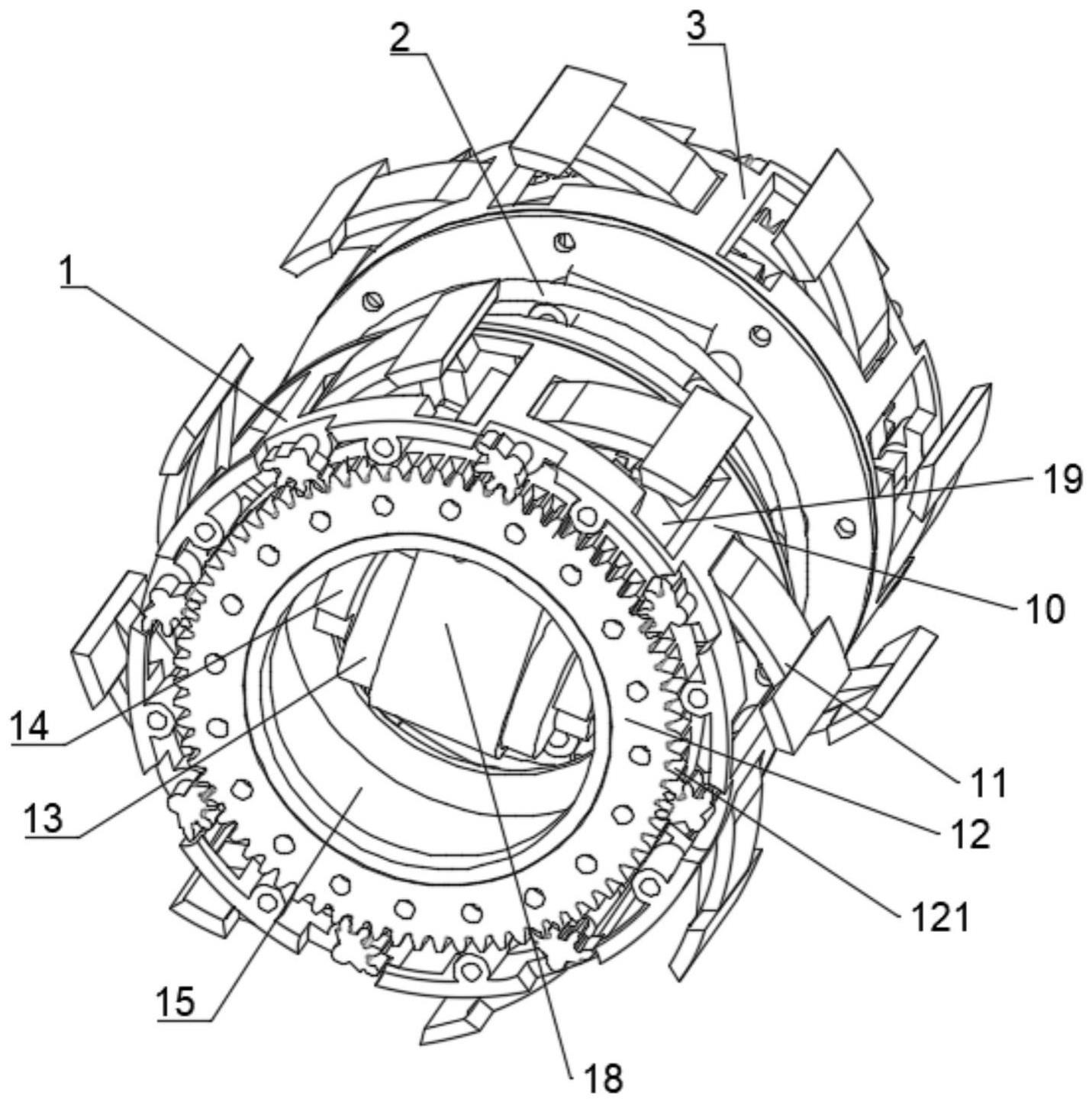
3、主动机构,所述主动机构包括环状的第一壳体、以及设置于所述第一壳体内的变径组件;
4、所述第一壳体的外壁沿圆周方向设置有多个支撑组件,所述支撑组件包括转动轴和具有弹性的支撑件,所述转动轴沿所述第一壳体的轴向方向设置;所述支撑件的一端套设于所述转动轴上,所述支撑件的另一端具有用于抵接管道内壁的抵接部,所述转动轴用于带动所述支撑件相对于所述第一壳体的外壁转动;
5、所述变径组件包括传动电机和环状齿轮,所述环状齿轮与所述第一壳体同轴设置于所述第一壳体内并且可相对于所述第一壳体转动,所述环状齿轮的外侧设置有外齿带,所述转动轴的一端通过齿轮与所述外齿带啮合传动,所述环状齿轮的内侧设置有内齿带,所述传动电机的输出端通过齿轮与所述内齿带啮合传动。
6、进一步的,所述支撑件的另一端设置具有弹性的支撑横板,所述支撑横板靠近管壁的板面为弧形面,用于抵接贴合管道的管壁。
7、进一步的,所述第一壳体的外壁沿圆周方向在所述支撑件下方设置有多个卡槽,所述转动轴设置于对应的所述卡槽内,所述转动轴用于带动所述支撑件的所述抵接部转动至容置于所述卡槽内,或转动至所述第一壳体的外部。
8、进一步的,所述支撑件的内侧设置有加强筋,所述加强筋沿平行于所述支撑件的转动方向设置。
9、进一步的,所述传动电机为舵机。
10、进一步的,还包括设置于所述第一壳体内的驱动组件,所述驱动组件包括安装架、振动电机和偏心轮,所述振动电机设置于所述安装架上,所述振动电机的输出轴固定有偏心轮,所述振动电机驱动所述偏心轮转动产生激振力,使所述支撑件碰撞管壁产生向前运动趋势。
11、进一步的,所述振动电机的前后两端分别设置有输出轴,所述偏心轮分别固定于所述振动电机的前后两端。
12、进一步的,所述第一壳体内设置有中空腔室,所述中空腔室内部可用于安装检测、清洗等功能部件。
13、进一步的,还包括从动机构,所述从动机构包括第二壳体和所述变径组件,所述第二壳体的外壁对应的沿圆周方向设置有多个所述转动轴和多个具有弹性的所述支撑件;
14、弹性件,所述第一壳体通过所述弹性件与所述第二壳体连接,并且所述第一壳体与所述第二壳体相互平行设置。
15、与现有技术相比,本发明的一种管道机器人的有益效果如下:
16、1、本发明的一种管道机器人,在第一壳体内设置变径组件,通过其传动电机、环状齿轮和转动轴之间的啮合传动,带动第一壳体上的支撑件转动,改变管道机器人的直径,此机构占用空间小,可适应多种不同直径的管道。
17、2、本发明的一种管道机器人,在支撑件的另一端设置具有弹性的支撑横板,用于抵接贴合管道的管壁,增强支撑件对管壁的贴合,使管道机器人具有良好的自适应能力,避免行走时倾倒和侧翻。
18、3、本发明的一种管道机器人,在主动机构与从动机构之间设置弹簧,当振动电机的振动频率与整个弹簧系统的固有频率一致时,达到共振可大大增加机器人的行进速度。
技术特征:
1.一种管道机器人,其特征在于,包括:
2.根据权利要求1所述的一种管道机器人,其特征在于:
3.根据权利要求2所述的一种管道机器人,其特征在于:
4.根据权利要求3所述的一种管道机器人,其特征在于:
5.根据权利要求1所述的一种管道机器人,其特征在于:
6.根据权利要求1所述的一种管道机器人,其特征在于:
7.根据权利要求6所述的一种管道机器人,其特征在于:
8.根据权利要求1所述的一种管道机器人,其特征在于:
9.根据权利要求1所述的一种管道机器人,其特征在于:
技术总结
本发明涉及一种管道机器人,包括主动机构,该主动机构包括环状的第一壳体、以及设置于所述第一壳体内的变径组件;所述第一壳体的外壁沿圆周方向设置有多个支撑组件,所述支撑组件包括转动轴和具有弹性的支撑件,所述转动轴用于带动支撑件相对于第一壳体的外壁转动;所述变径组件包括传动电机和环状齿轮,所述环状齿轮的内侧和外侧分别设置有内齿带和外齿带,所述转动轴的一端通过齿轮与所述外齿带啮合传动,所述传动电机的输出端通过齿轮与所述内齿带啮合传动。该管道机器人在第一壳体内设置变径组件,通过其传动电机、环状齿轮和转动轴之间的啮合传动,带动第一壳体上的支撑件转动,改变管道机器人的直径,可适应多种不同直径的管道。
技术研发人员:刘锋,黄超雄,黄嘉锐,杨文杰,黄春龙,卢伟雄
受保护的技术使用者:韶关学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!