谐波减速器、关节模组、机械臂、移动平台和机器人的制作方法
本申请涉及机器人的,具体是涉及谐波减速器、关节模组、机械臂、移动平台和机器人。
背景技术:
1、对于机器人(例如四足机器人)、移动平台等载具而言,前述载具上需要搭载具有多个关节模组的机械臂(例如6轴、7轴),以满足不同的使用需求。其中,前述关节模组中诸如减速器的可靠性会极大地影响前述机械臂的抓取精度,故亟需提高减速器的可靠性。然而,相关技术(例如us6050155a)的杯型谐波减速器10中,结合图15,杯状柔轮22底部的法兰盘52嵌入轴承的内圈内,并进一步通过诸如螺栓的紧固件与输出构件58固定连接;但在输出构件58上搭载的负载较大、杯型谐波减速器10或其输入端的电机发生震动等工况下,法兰盘52与前述内圈存在因轴向约束不足而发生相对运动的风险,进而导致法兰盘52和前述内圈中的至少一者出现磨损、变形等结构失效,极大地影响了杯型谐波减速器10的可靠性,进而影响了机械臂的抓取精度。
技术实现思路
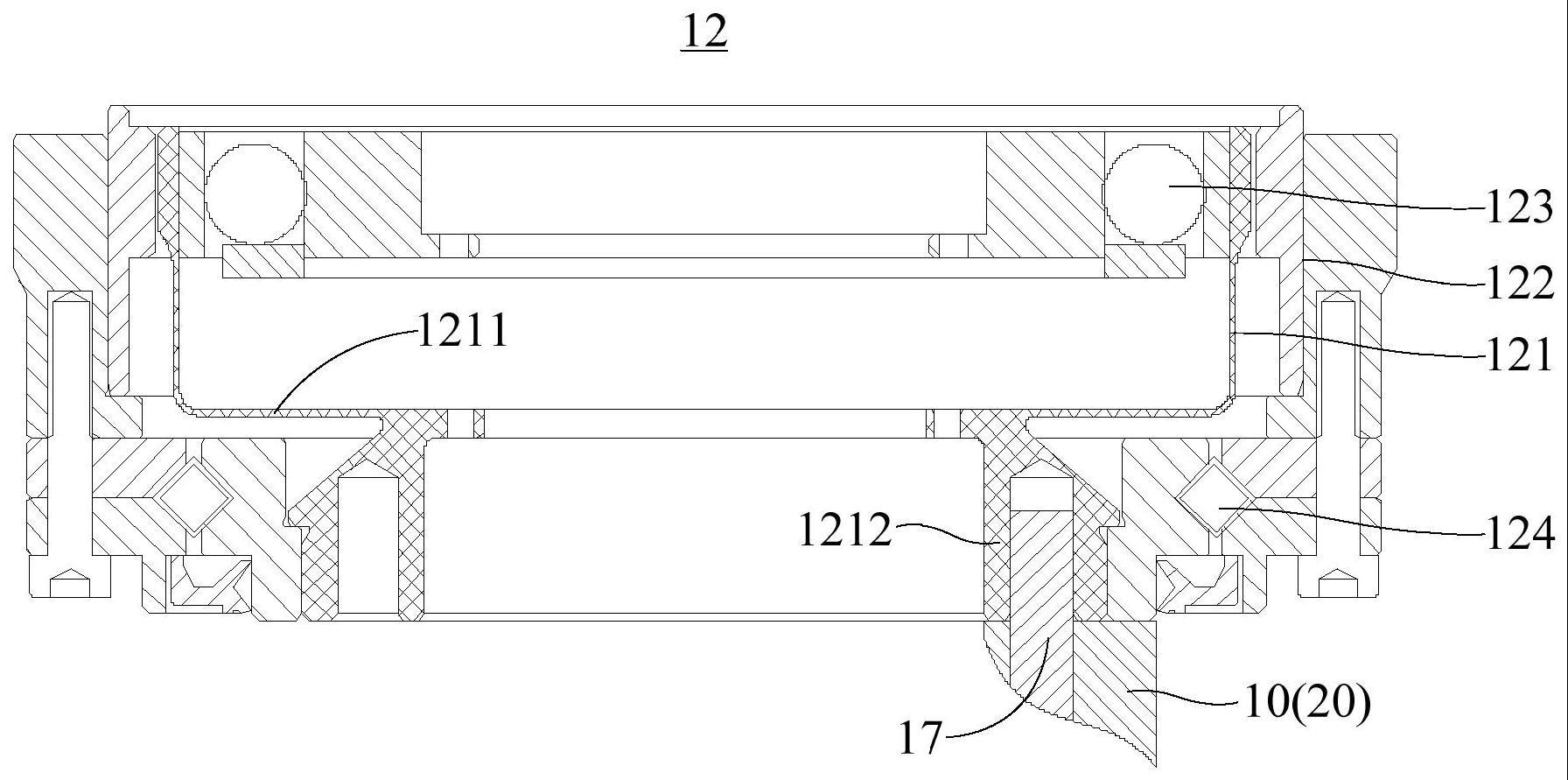
1、本申请实施例提供了一种谐波减速器,包括:柔轮,柔轮包括一体成型设置的主体部以及转接部,主体部呈杯状设置,转接部沿谐波减速器的轴向设置于背离主体部的杯口的另一端,转接部背离主体部设置的外端面上设置有固定孔,固定孔绕轴向间隔设置多个,转接部具有背离主体部设置的第一支撑台面;轴承组件,轴承组件包括彼此嵌套的外环部和内环部,内环部具有朝向主体部设置的第二支撑台面;其中,转接部插置于内环部内,转接部背离主体部设置的外端面位于内环部背离主体部设置的外端面朝向主体部的一侧,内环部背离第二支撑台面的外端面用于支撑待驱动部件,待驱动部件借助螺栓在多个固定孔处与转接部固定连接,且第一支撑台面在螺栓的预紧力作用下沿轴向压持于第二支撑台面上。
2、在一些实施例中,在轴向上,内环部的外端面与转接部的外端面之间的高度差介于0.02mm与0.1mm之间。
3、在一些实施例中,在轴向上,内环部的外端面与转接部的外端面之间的高度差介于0.03mm与0.06mm之间。
4、在一些实施例中,在谐波减速器的径向上,第一支撑台面与第二支撑台面的重叠区域的宽度介于0.5mm与1.5mm之间。
5、在一些实施例中,转接部包括与主体部的底部连接的过渡部以及连接于过渡部背离于主体部一端的固定部,过渡部靠近固定部一端的外径尺寸大于固定部靠近过渡部一端的外径尺寸,进而在过渡部与固定部的连接处形成第一支撑台面,内环部包括沿轴向连接的第一内环段和第二内环段,第一内环段位于第二内环段朝向主体部的一侧,第一内环段的内径尺寸大于第二内环段的内径尺寸,进而在第一内环段和第二内环段的连接处形成第二支撑台面。
6、在一些实施例中,固定孔设置成盲孔,过渡部的至少部分外壁呈锥面设置,锥面的横截面尺寸在朝向主体部的方向上逐渐缩小,第一支撑台面沿轴向朝向主体部的投影落在锥面上。
7、在一些实施例中,在轴向上,第一支撑台面与锥面的间隔距离不大于1.5mm。
8、在一些实施例中,固定部的外壁设置有与第一支撑台面相邻设置的内切槽,第一内环段的内壁设置有与第二支撑台面相邻设置的内切槽。
9、在一些实施例中,谐波减速器包括刚轮和波发生器,刚轮环绕设置于主体部的外围,并与外环部保持相对固定,波发生器设置于主体部内,并在转动时使得主体部与刚轮选择性啮合。
10、在一些实施例中,刚轮包括彼此嵌套的外套筒和内套筒,外套筒包括主筒体以及设置于主筒体的内壁上的环形承台,内套筒抵接于环形承台上,主筒体和环形承台分别抵接于外环部上,主筒体和外环部设置有彼此对应的固定孔对,环形承台背离内套筒的外端面设置有环形槽,环形槽用于容纳密封圈。
11、在一些实施例中,外套筒的密度小于内套筒的密度,内套筒的硬度大于外套筒的硬度。
12、在一些实施例中,轴承组件进一步包括夹设于外环部与内环部之间的柱状滚珠,柱状滚珠的两侧端面相对于轴向倾斜设置,第二支撑台面沿谐波减速器的径向设置,第二支撑台面所在平面与柱状滚珠背离主体部的外端面相交,且交线位于柱状滚珠的几何中心背离主体部的一侧。
13、在一些实施例中,转接部与内环部通过第一支撑台面与第二支撑台面之间的摩擦力固定连接。
14、本申请实施例提供了一种关节模组,关节模组包括中空内转子电机和上述实施例所述的谐波减速器,中空内转子电机与谐波减速器连接。
15、本申请实施例提供了一种机械臂,机械臂包括多个上述实施例所述的关节模组。
16、本申请实施例提供了一种移动平台,移动平台上设置有上述实施例所述的机械臂。
17、本申请实施例提供了一种机器人,机器人上设置有上述实施例所述的机械臂。
18、在一些实施例中,机器人为四足机器人,机械臂设置在四足机器人的背部。
19、本申请的有益效果是:相较于相关技术中法兰盘(相当于转接部)与杯状柔轮(相当于柔轮)的底部通过螺栓连接,本申请将柔轮的主体部和转接部设置成一体成型的结构部件,能够减除传统通过多个螺栓固定连接的螺栓的重量,以及降低固定螺栓所需结构的壁厚,从而实现降低谐波减速器的重量的效果,还有利于避免因相应的螺牙崩裂导致结构失效的风险,进而增加谐波减速器的可靠性。进一步地,本申请中,柔轮和轴承组件装配之后,转接部的第一支撑台面和内环部的第二支撑台面接触,柔轮的外端面在谐波减速器的轴向上相较于轴承组件的外端面内缩一高度差,以在待驱动部件借助螺栓在多个固定孔处与转接部固定连接时,第一支撑台面在螺栓的预紧力作用下沿谐波减速器的轴向压持于第二支撑台面上,使得待驱动部件和转接部沿谐波减速器的轴向分别抵接于内环部的相背两侧,进而在谐波减速器的轴向上约束转接部和内环部,这样有利于避免柔轮和内环部沿谐波减速器的轴向发生窜动,从而有利于增加谐波减速器的可靠性。
技术特征:
1.一种谐波减速器,其特征在于,包括:
2.根据权利要求1所述的谐波减速器,其特征在于,在所述轴向上,所述内环部的外端面与所述转接部的外端面之间的高度差介于0.02mm与0.1mm之间。
3.根据权利要求2所述的谐波减速器,其特征在于,在所述轴向上,所述内环部的外端面与所述转接部的外端面之间的高度差介于0.03mm与0.06mm之间。
4.根据权利要求1所述的谐波减速器,其特征在于,在所述谐波减速器的径向上,所述第一支撑台面与所述第二支撑台面的重叠区域的宽度介于0.5mm与1.5mm之间。
5.根据权利要求1所述的谐波减速器,其特征在于,所述转接部包括与所述主体部的底部连接的过渡部以及连接于所述过渡部背离于所述主体部一端的固定部,所述过渡部靠近所述固定部一端的外径尺寸大于所述固定部靠近所述过渡部一端的外径尺寸,进而在所述过渡部与所述固定部的连接处形成所述第一支撑台面,所述内环部包括沿所述轴向连接的第一内环段和第二内环段,所述第一内环段位于所述第二内环段朝向所述主体部的一侧,所述第一内环段的内径尺寸大于所述第二内环段的内径尺寸,进而在所述第一内环段和第二内环段的连接处形成所述第二支撑台面。
6.根据权利要求5所述的谐波减速器,其特征在于,所述固定孔设置成盲孔,所述过渡部的至少部分外壁呈锥面设置,所述锥面的横截面尺寸在朝向所述主体部的方向上逐渐缩小,所述第一支撑台面沿所述轴向朝向所述主体部的投影落在所述锥面上。
7.根据权利要求6所述的谐波减速器,其特征在于,在所述轴向上,所述第一支撑台面与所述锥面的间隔距离不大于1.5mm。
8.根据权利要求5所述的谐波减速器,其特征在于,所述固定部的外壁设置有与所述第一支撑台面相邻设置的内切槽,所述第一内环段的内壁设置有与所述第二支撑台面相邻设置的内切槽。
9.根据权利要求1所述的谐波减速器,其特征在于,所述谐波减速器包括刚轮和波发生器,所述刚轮环绕设置于所述主体部的外围,并与所述外环部保持相对固定,所述波发生器设置于所述主体部内,并在转动时使得所述主体部与所述刚轮选择性啮合。
10.根据权利要求9所述的谐波减速器,其特征在于,所述刚轮包括彼此嵌套的外套筒和内套筒,所述外套筒包括主筒体以及设置于所述主筒体的内壁上的环形承台,所述内套筒抵接于所述环形承台上,所述主筒体和所述环形承台分别抵接于所述外环部上,所述主筒体和所述外环部设置有彼此对应的固定孔对,所述环形承台背离所述内套筒的外端面设置有环形槽,所述环形槽用于容纳密封圈。
11.根据权利要求10所述的谐波减速器,其特征在于,所述外套筒的密度小于所述内套筒的密度,所述内套筒的硬度大于所述外套筒的硬度。
12.根据权利要求1所述的谐波减速器,其特征在于,所述轴承组件进一步包括夹设于所述外环部与所述内环部之间的柱状滚珠,所述柱状滚珠的两侧端面相对于所述轴向倾斜设置,所述第二支撑台面沿所述谐波减速器的径向设置,所述第二支撑台面所在平面与所述柱状滚珠背离所述主体部的外端面相交,且交线位于所述柱状滚珠的几何中心背离所述主体部的一侧。
13.根据权利要求1所述的谐波减速器,其特征在于,所述转接部与所述内环部通过所述第一支撑台面与所述第二支撑台面之间的摩擦力固定连接。
14.一种关节模组,其特征在于,所述关节模组包括中空内转子电机和权利要求1-13任一项所述的谐波减速器,所述中空内转子电机与所述谐波减速器连接。
15.一种机械臂,其特征在于,所述机械臂包括多个权利要求14所述的关节模组。
16.一种移动平台,其特征在于,所述移动平台上设置有权利要求15所述的机械臂。
17.一种机器人,其特征在于,所述机器人上设置有权利要求15所述的机械臂。
18.根据权利要求17所述的机器人,其特征在于,所述机器人为四足机器人,所述机械臂设置在所述四足机器人的背部。
技术总结
本申请主要是涉及谐波减速器、关节模组、机械臂、移动平台和机器人,谐波减速器包括柔轮和轴承组件,柔轮包括一体成型设置的主体部及转接部,转接部设置于背离主体部的杯口的另一端,转接部的外端面上设置有固定孔,轴承组件包括外环部和内环部,转接部插置于内环部内,转接部的外端面位于内环部的外端面朝向主体部的一侧,内环部的外端面用于支撑待驱动部件,待驱动部件借助螺栓在多个固定孔处与转接部固定连接,且转接部的第一支撑台面在螺栓的预紧力作用下沿轴向压持于内环部的第二支撑台面上,使得待驱动部件和转接部沿轴向分别抵接于内环部的相背两侧,进而在谐波减速器的轴向上约束转接部和内环部,有利于增加谐波减速器的可靠性。
技术研发人员:庞博,杨宇,沈悰
受保护的技术使用者:深圳逐际动力科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!