空间遥感扫描成像系统自消旋转台机构及其构建方法与流程
本发明涉及空间遥感,尤其涉及一种空间遥感扫描成像系统自消旋转台机构及其构建方法。
背景技术:
1、空间遥感相机尺寸较大,质量较重,扫描成像时其运动可分解为扫描运动和摆动,会产生沿旋转轴方向的角动量及干扰力矩,需要进行消旋抑制,以保证卫星平台的姿态稳定性。
2、目前,采用的消旋装置一般都存在安装及测量误差,导致残余力矩和残余角动量仍会干扰卫星姿态。比如,申请号201810073335.4的专利“一种空间遥感扫描成像系统小惯量自消旋控制方法和系统”提供了一套消旋系统,需额外增加驱动机构及时间对准器才能实现对空间遥感扫描成像系统的消旋,实现同步控制难度较大,且未公布机构的具体构型;又比如,在申请号201811264950.x的专利“一种用于对卫星的旋转体进行消旋控制的方法及相应的消旋装置”中,需额外增加平衡轮驱动机构以实现卫星的旋转体消旋,平衡轮及反作用轮联合控制,将消旋控制引入到整星的姿态控制系统,给整星姿控带来负担,不能实现机构自消旋。
3、因此,急需研究能够实现自消旋且控制系统简易的空间遥感扫描成像系统转台机构。
技术实现思路
1、为了解决现有技术中存在的问题,本发明提供了如下技术方案。
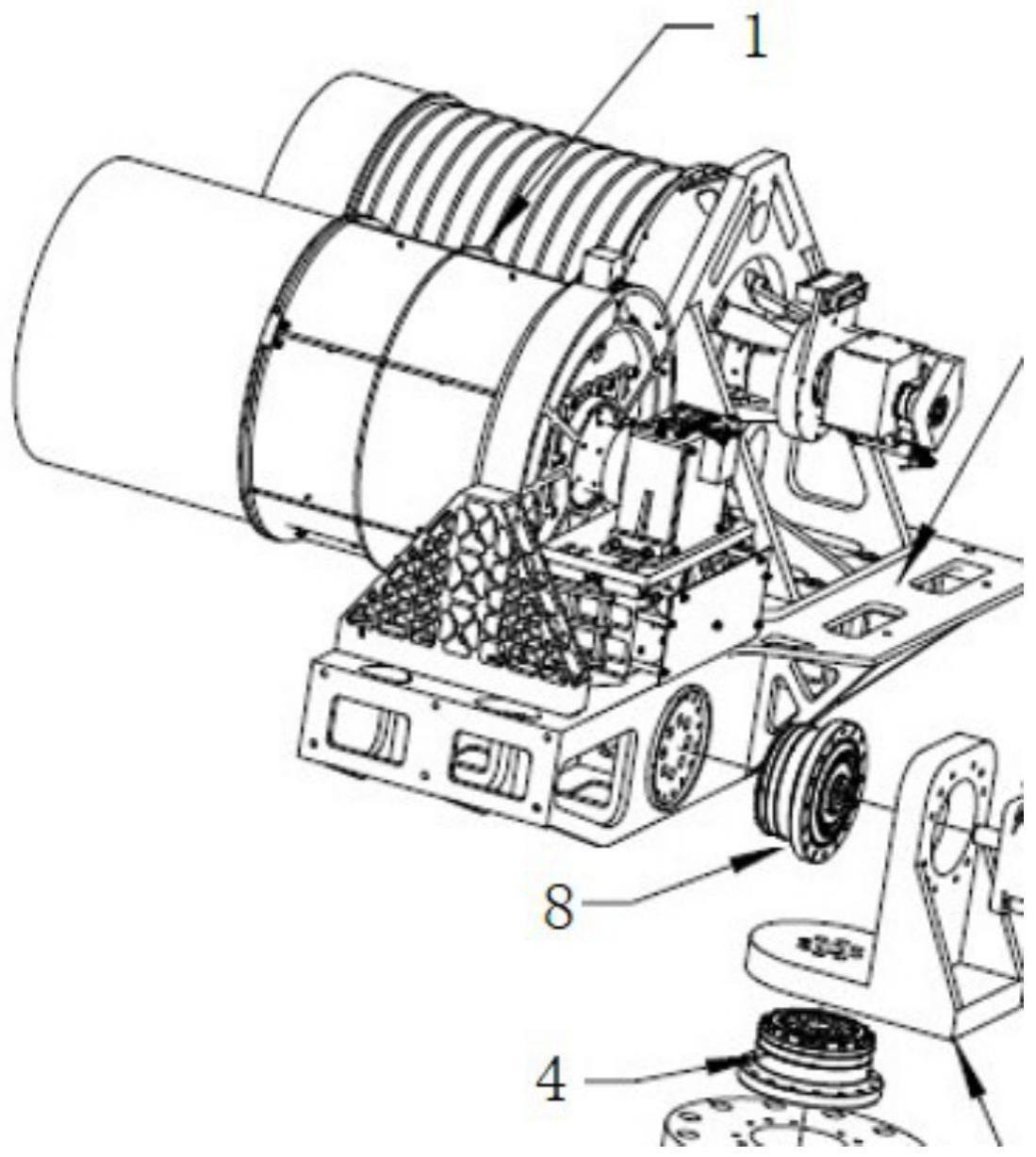
2、本发明第一方面提供了一种空间遥感扫描成像系统自消旋转台机构,包括第一自消旋机构和第二自消旋机构,所述第一自消旋机构和第二自消旋机构垂直连接,所述第一自消旋机构驱动所述空间遥感扫描成像系统扫描运动,所述第二自消旋机构驱动所述空间遥感扫描成像系统摆动;所述第一自消旋机构与卫星平台连接,所述第二自消旋机构与空间遥感扫描成像系统连接;所述第一自消旋机构包括第一双出轴电机,所述第一双出轴电机用于驱动两侧输出轴连接的所述空间遥感扫描成像系统和第一消旋设备同轴反向运动;所述第二自消旋机构包括第二双出轴电机,所述第二双出轴电机用于驱动两侧输出轴连接的所述空间遥感扫描成像系统和第二消旋设备同轴反向运动。
3、优选地,所述第一自消旋机构还包括第一谐波减速器,所述第一谐波减速器的输入端与所述第一双出轴电机的一侧输出轴连接,所述第一谐波减速器的输出端与所述第二自消旋机构连接。
4、优选地,所述自消旋转台机构还包括扫摆支架,所述扫摆支架包括相互连接的底面和立面,所述第一谐波减速器的输出端连接在所述扫摆支架的底面上,所述第二自消旋机构连接在所述扫摆支架的立面上。
5、优选地,所述第一消旋设备为第一平衡轮,所述第一平衡轮与所述第一双出轴电机的另一侧输出轴连接。
6、优选地,所述自消旋转台机构还包括基座,所述第一谐波减速器与所述第一双出轴电机分别固定在所述基座的两侧,所述基座固定在所述卫星平台上。
7、优选地,所述第二自消旋机构还包括第二谐波减速器,所述第二谐波减速器的输入端与所述第二双出轴电机的一侧输出轴连接,所述第二谐波减速器的输出端与所述空间遥感扫描成像系统连接。
8、优选地,所述自消旋转台机构还包括相机支架,所述第二谐波减速器的输出端与所述空间遥感扫描成像系统均固定在所述相机支架上。
9、优选地,所述第二消旋设备为第二平衡轮,所述第二平衡轮与所述第二双出轴电机的另一侧输出轴连接。
10、优选地,所述第二谐波减速器与所述第二双出轴电机分别固定在所述扫摆支架的立面两侧。
11、本发明第二方面提供了如第一方面所述的空间遥感扫描成像系统自消旋转台机构的构建方法,包括:
12、分析所述空间遥感扫描成像系统摆动时的运动参量以及扫描时的运动参量;
13、根据摆动时的运动参量计算得到第二双出轴电机的转速;
14、根据第二双出轴电机的转速与所述空间遥感扫描成像系统的角动量计算得到第二消旋设备的转动惯量;
15、根据第二消旋设备的转动惯量设计其外形尺寸;
16、根据扫描时的运动参量计算得到第一双出轴电机的转速;
17、根据第一双出轴电机的转速与所述空间遥感扫描成像系统的角动量计算得到第一消旋设备的转动惯量;
18、根据第一消旋设备的转动惯量设计其外形尺寸。
19、本发明的有益效果是:本发明提供的空间遥感扫描成像系统自消旋转台机构及其构建方法,通过设置第一自消旋机构和第二自消旋机构,并分别驱动空间遥感扫描成像系统扫描运动和摆动;同时,在第一自消旋机构中设置第一双出轴电机,用于驱动两侧输出轴连接的空间遥感扫描成像系统和第一消旋设备同轴反向运动;在第二自消旋机构中设置第二双出轴电机,用于驱动两侧输出轴连接的所述空间遥感扫描成像系统和第二消旋设备同轴反向运动。即通过第一消旋设备和第二消旋设备,在空间遥感扫描成像系统扫描运动和摆动时对卫星提供等大反向的角动量,以抵消空间遥感扫描成像系统运动时给卫星带来的扰动,使卫星保持姿态平稳。另外,本发明提供的自消旋转台机构,避免了采用两套驱动系统造成机构繁杂及控制系统同步驱动的难点,精简了机构构型且简化了控制系统;采用谐波减速器连接负载端(空间遥感扫描成像系统),降低负载端转速以减小负载端的角动量,同时增加驱动力矩,而消旋设备维持较高转速,可以使用较轻质量的消旋设备提供较大的角动量,减轻了自消旋转台的总质量。该机构有效地解决了空间遥感扫描成像系统的自消旋问题。
技术特征:
1.一种空间遥感扫描成像系统自消旋转台机构,其特征在于,包括第一自消旋机构和第二自消旋机构,所述第一自消旋机构和第二自消旋机构垂直连接,所述第一自消旋机构驱动空间遥感扫描成像系统扫描运动,所述第二自消旋机构驱动空间遥感扫描成像系统摆动;所述第一自消旋机构与卫星平台连接,所述第二自消旋机构与空间遥感扫描成像系统连接;所述第一自消旋机构包括第一双出轴电机,所述第一双出轴电机用于驱动两侧输出轴连接的所述空间遥感扫描成像系统和第一消旋设备同轴反向运动;所述第二自消旋机构包括第二双出轴电机,所述第二双出轴电机用于驱动两侧输出轴连接的所述空间遥感扫描成像系统和第二消旋设备同轴反向运动。
2.如权利要求1所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述第一自消旋机构还包括第一谐波减速器,所述第一谐波减速器的输入端与所述第一双出轴电机的一侧输出轴连接,所述第一谐波减速器的输出端与所述第二自消旋机构连接。
3.如权利要求2所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述自消旋转台机构还包括扫摆支架,所述扫摆支架包括相互连接的底面和立面,所述第一谐波减速器的输出端连接在所述扫摆支架的底面上,所述第二自消旋机构连接在所述扫摆支架的立面上。
4.如权利要求2所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述第一消旋设备为第一平衡轮,所述第一平衡轮与所述第一双出轴电机的另一侧输出轴连接。
5.如权利要求2所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述自消旋转台机构还包括基座,所述第一谐波减速器与所述第一双出轴电机分别固定在所述基座的两侧,所述基座固定在所述卫星平台上。
6.如权利要求3所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述第二自消旋机构还包括第二谐波减速器,所述第二谐波减速器的输入端与所述第二双出轴电机的一侧输出轴连接,所述第二谐波减速器的输出端与所述空间遥感扫描成像系统连接。
7.如权利要求6所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述自消旋转台机构还包括相机支架,所述第二谐波减速器的输出端与所述空间遥感扫描成像系统均固定在所述相机支架上。
8.如权利要求6所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述第二消旋设备为第二平衡轮,所述第二平衡轮与所述第二双出轴电机的另一侧输出轴连接。
9.如权利要求6所述的空间遥感扫描成像系统自消旋转台机构,其特征在于,所述第二谐波减速器与所述第二双出轴电机分别固定在所述扫摆支架的立面两侧。
10.如权利要求1-9任一项所述的空间遥感扫描成像系统自消旋转台机构的构建方法,其特征在于,包括:
技术总结
本发明公开了空间遥感扫描成像系统自消旋转台机构及其构建方法,属于空间遥感技术领域。该机构包括第一自消旋机构和第二自消旋机构,第一自消旋机和第二自消旋机构分别用于驱动空间遥感扫描成像系统扫描运动和摆动;第一自消旋机构与卫星平台连接,第二自消旋机构与空间遥感扫描成像系统连接;第一自消旋机构包括第一双出轴电机,用于驱动连接的空间遥感扫描成像系统和第一消旋设备同轴反向运动;第二自消旋机构包括第二双出轴电机,用于驱动连接的空间遥感扫描成像系统和第二消旋设备同轴反向运动。在空间遥感扫描成像系统扫描运动和摆动时对卫星提供等大反向的角动量,以抵消空间遥感扫描成像系统运动时给卫星带来的扰动,使卫星保持姿态平稳。
技术研发人员:刘再,王洋,贠远,王雷
受保护的技术使用者:椭圆时空(北京)科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!