一种多挡AMT纯电动城市客车自适应换挡规律设计方法
本发明涉及amt换挡智能化设计方法领域,具体地讲,涉及一种多挡amt纯电动城市客车自适应换挡规律设计方法。
背景技术:
1、自动机械式变速器(amt)因结构简单、传动效率高、成本低等优势被广泛用于纯电动汽车领域。通过搭载amt,不仅能降低设计阶段整车对驱动电机工作扭矩的要求,此外,合理的换挡规律能够调节驱动电机工作区域,使其在高效区域工作的同时也能满足整车驱动扭矩。因此,换挡规律的合理制定成为amt纯电动汽车性能提升的有效途径之一。
2、目前,国内外研究人员对amt换挡规律已开展了丰富的研究。根据换挡参数的不同,传统换挡规律可分为单参数换挡规律、双参数换挡规律以及三参数换挡规律。其中,以车速和加速踏板开度作为控制参数的双参数换挡规律在工程领域应用较为广泛。该类换挡规律常通过逻辑门限规则实现车辆挡位切换,对行驶工况适应能力不足。部分研究基于电机效率图分别制定了以动力性与经济性为目标的两种换挡规律,实际应用时,通过一定规则对两种规律进行切换。尽管该方法在工况适应能力方面有所提升,但是,动力性与经济性规律二者本身存在一定矛盾,动力性规律的应用必然导致车辆经济性较差,经济性规律的应用需以牺牲车辆动力性为前提。部分研究也提出了各种兼顾动力性与经济性换挡规律的制定方法。但是,上述方法大多基于一定工况制定换挡规则,或通过解析模型求得确定性换挡规律,这些换挡规律在未知随机工况应用时,其自适应能力仍有待提升。因此,有学者通过遗传算法获取了考虑动力性与经济性的综合型换挡规律,并引入加速度,建立了基于车速、加速度、踏板开度的三参数模糊控制器,用于换挡规律的在线自适应调整,提升了换挡规律的性能。该研究基于匹配2挡变速器的乘用车开展,且未考虑车辆载荷变化对换挡规律的影响。
技术实现思路
1、本发明要解决的技术问题是提供一种多挡amt纯电动城市客车自适应换挡规律设计方法,在兼顾车辆动力性与经济性的前提下,通过车辆载荷变化与加速度变化在线调整挡位切换点,有效提升了amt换挡规律的自适应能力。
2、本发明采用如下技术方案实现发明目的:
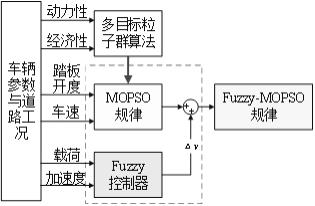
3、一种多挡amt纯电动城市客车自适应换挡规律设计方法,其特征在于,包括以下步骤:s1:基于车辆参数与特征,以不同加速踏板开度下的换挡车速为优化目标,开展基于多目标粒子群算法的换挡规律优化,建立兼顾动力性与经济性的mopso换挡规律;
4、s2:以实际道路工况下城市客车载荷与加速度变化为输入,以换挡点车速调整量为输出,构建了双输入/单输出的模糊控制器,对mopso换挡规律进行在线自适应调整,得到了fuzzy-mopso换挡规律;
5、s3:对提出fuzzy-mopso换挡规律进行性能验证。
6、作为本技术方案的进一步限定,所述s1的具体优化过程如下:
7、s11:建立目标函数:
8、(1)
9、其中:为1挡换2挡的车速;
10、为2挡升3挡的车速;
11、为动力性目标;
12、为经济性目标;
13、 (2)
14、其中:为1挡挡位下的旋转质量系数;
15、为2挡挡位下的旋转质量系数;
16、为3挡挡位下的旋转质量系数;
17、表示整车质量;
18、表示车辆行驶所需驱动力;
19、表示车辆行驶滚动阻力;
20、表示车辆行驶空气阻力;
21、将车辆在加速过程中的能耗作为经济性目标函数,表示为:
22、(3)
23、其中:为车辆在1挡运行的时间;
24、为车辆在2挡运行的时间;
25、为车辆运行的总时间;
26、为电机输出功率;
27、为amt传动效率;
28、为主减效率;
29、s12:建立约束条件:
30、为提高优化效率,优化过程中对换挡车速分别进行了约束,表达式如下:
31、(4)
32、其中:表示最佳动力性换挡规律下1挡升2挡的车速;
33、表示最佳动力性换挡规律下2挡升3挡的车速;
34、表示最佳经济性换挡规律下1挡升2挡的车速;
35、表示最佳经济性换挡规律下2挡升3挡的车速;
36、s13:优化结果:
37、由于动力性与经济性评价指标的量纲不同,求解最优结果时通过线性加权对两个评价指标进行了综合,如下式所示:
38、(5)
39、其中:与为权重因子;
40、与为比例因子。
41、作为本技术方案的进一步限定,在所述s13中,与、与根据不同踏板开度下与的数量级进行选取。
42、作为本技术方案的进一步限定,与的和为1。
43、作为本技术方案的进一步限定,所述s2的具体优化过程如下:
44、考虑城市客车实际工作情况,加速度范围设计为= -6~6 m/s2,载荷变化=0~5000 kg,车速调整量= -6~6 km/h;
45、分别将加速度、载荷变化以及速度调整量转化为论域{-3,-2,-1,0,1,2,3}、{0,1000,2000,3000,4000,5000}和{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
46、将载荷变化的模糊子集划分为:vs、nm、ms、z、mb、b、vb;
47、将加速度的模糊子集划分为:nb、nm、ns、zo、ps、pm、pb;
48、将车速调整量的模糊子集划分为:nb、nm、ns、zo、ps、pm、pb;
49、s21:以载荷变化与加速度变化作为模糊控制器输入,载荷变化与加速度变化各有7个子集,共能获取7×7=49条控制规则;
50、s22:据模糊规则得到载荷和加速度与换挡速度调整量的关系;
51、s23:将基于载荷与加速度的模糊控制器引入mopso算法所得的换挡车速进行在线自适应调整,即可得到fuzzy-mopso换挡规律。
52、作为本技术方案的进一步限定,所述s3的性能验证包括动力性验证及经济性验证。
53、与现有技术相比,本发明的优点和积极效果是:
54、传统amt换挡规律基于规则制定,对行驶工况适应性差,目前,尚未有相关研究考虑车辆载荷变化对换挡规律的影响。本发明充分考虑了城市客车载荷随机变化的特征,基于多目标粒子群算法制定了兼顾动力性与经济性的换挡规律,并以车辆载荷变化与加速度变化为输入,设计了模糊控制器,实现了amt纯电动城市客车在未知工况行驶时换挡规律的自适应调整,在兼顾车辆动力性与经济性的基础上能够通过车辆载荷与加速度的变化自适应地去调整换挡车速,有效改善了车辆经济性,并减少了换挡频率,提升了车辆传动系统使用寿命。
55、基于多目标粒子群的兼顾动力性与经济性的换挡规律优化方法中,以动力性换挡规律与经济性换挡规律的车速进行了约束,能够有效提升优化速度。
56、模糊控制器设计过程中,通过加速度与载荷两个变量充分反应了车辆行驶过程中工况条件的变化,且提出了换挡速度调整量的输出依据为:载荷越大调整量越大;加速度越大调整量越小的模糊判据。能够较好地符合实际运行过程中,车辆加速度越大,换入高挡的趋势越明显,可提前换挡;而车辆载荷增加将提高对整车动力性的需求,需延迟换挡的特征。
57、验证环节中,同时考虑了车辆动力性与经济性,并且运用实际道路工况开展验证,结果更为真实有效。
- 还没有人留言评论。精彩留言会获得点赞!