基于LMS幅值相位搜索的转子振动抑制方法
本发明涉及磁悬浮轴承转子振动抑制领域,尤其涉及一种基于lms幅值相位搜索的转子振动抑制方法。
背景技术:
1、主动磁悬浮轴承(active magnetic bearings,amb)是一种通过电磁力实现使电机转子悬浮,从而实现无接触的支承装置。相比于传统机械轴承,磁悬浮轴承具有无摩擦、无需润滑、使用寿命长等优点,在工业中有着广泛的应用前景。
2、在实际应用中,由于转子质量分布不均匀、电机在运行时会产生电磁噪声等原因,磁悬浮轴承系统的转子会产生与转速同频或倍频的振动。这种振动会影响系统的稳定性和运行效果,更严重的情况,如果振动幅值过大,会导致转子与保护轴承发生碰撞,对系统造成损害。
3、磁悬浮轴承具有刚度、阻尼可调的特点,因此,可以通过主动控制调节系统的刚度和阻尼,从而抑制转子的振动。目前,针对刚性磁悬浮转子的振动问题,一种比较常用的方法是陷波滤波器或自适应滤波器提取振动信号并输入到控制系统进行抑制,但陷波器的引入会导致系统无法在全转速范围内保持稳定,因此这种方法稳定性很差。
4、改善传统陷波器的方法主要有以下几种:一种是分段移相补偿,根据系统的参数,描绘系统的根轨迹,通过计算得到在不同转速范围内,系统稳定需要对陷波器进行移相补偿的相位偏移角,从而对陷波器的输出进行分段相位补偿。这种方法可以使系统在全转速范围内稳定运行,但需要得到系统的精确参数,且可移植性不强。一种方法是引入变极性因子,即根据系统在不同转速下的稳定性改变陷波器的极性因子,通过切换极性因子确保系统的稳定性。但这种方法在极性切换瞬间会给系统带来冲击,调节过程不够稳定。另一种方法是多边形迭代搜索算法,也叫定角度搜索算法,这种方法在笛卡尔坐标系中以固定角度搜索使转子振幅陷波器的补偿幅值和相位偏移角,但搜索角度固定,使算法不够灵活;搜索步长固定,使算法无法兼顾搜索精度和搜索速度。针对定角度搜索算法的缺点,有学者研究了一种变角度搜索算法,这种方法通过一个公式改变搜索的角度,但公式的经验性较强,且抑振效果非常依赖公式中参数的选取。
技术实现思路
1、本发明目的在于针对现有技术的不足,提出一种基于lms幅值相位搜索的转子振动抑制方法,通过转子振幅变化,搜索最佳的补偿幅值和相位偏移角,将补偿后滤波器的输出汇入控制系统中,使控制系统输出合适的电流到磁悬浮轴承定子线圈中,进而在磁悬浮轴承中产生能和振动激励源相互抵消的悬浮力,从而在任意转速都能有效抑制转子振动。
2、本发明的目的是通过以下技术方案来实现的:一种基于lms幅值相位搜索的转子振动抑制方法,该方法包括以下步骤:
3、(1)对于磁悬浮转子系统,设置幅值相位搜索时磁悬浮转子的振幅目标值、起始补偿幅值、起始相位偏移角、相位搜索界限、相位搜索间隔数和补偿幅值搜索步长;
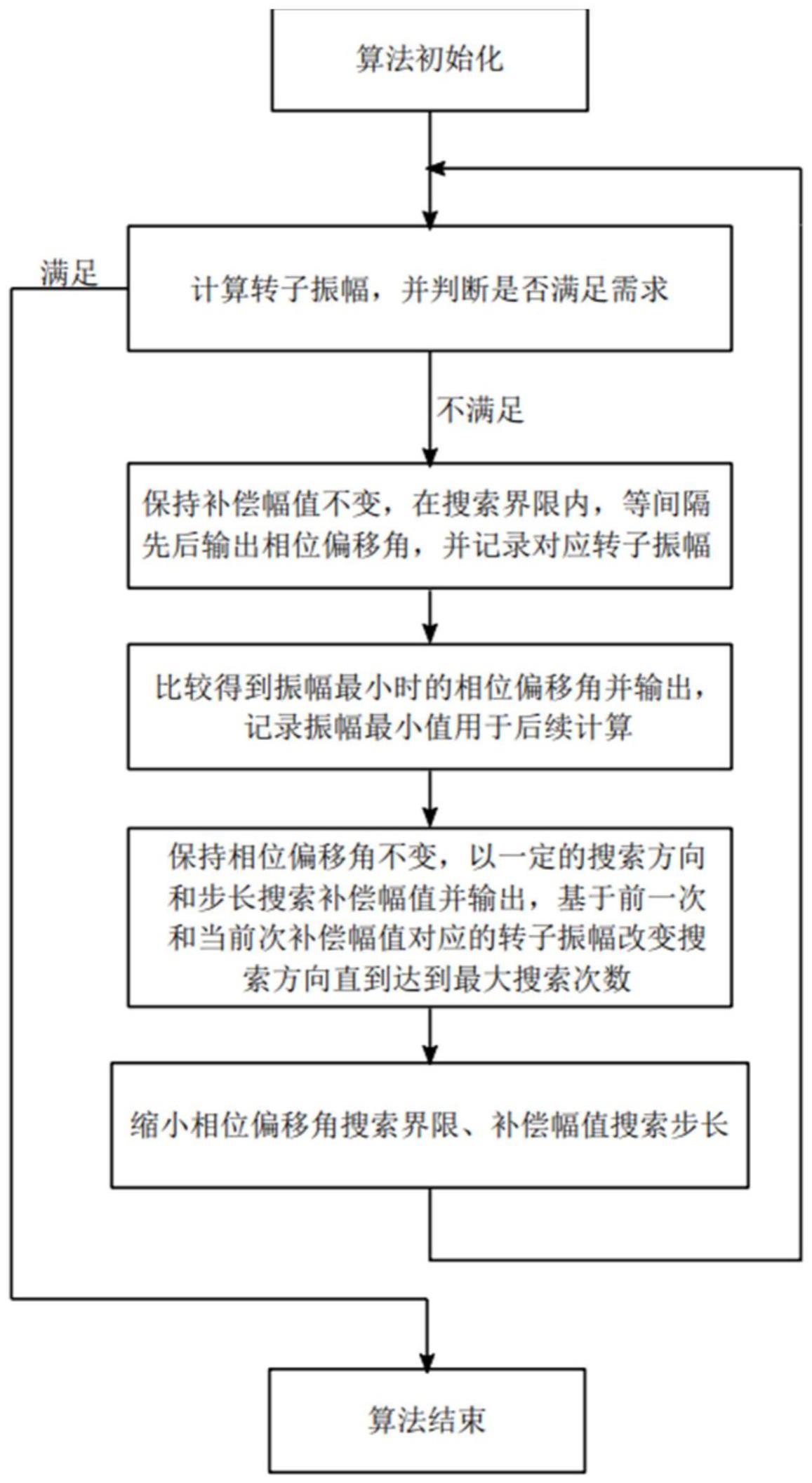
4、(2)计算磁悬浮转子系统的激励源引起的振幅;若大于振幅目标值,则进行幅值相位搜索;否则维持原来的补偿幅值和相位偏移角,执行步骤(7);
5、(3)保持起始补偿幅值不变,在起始相位偏移角搜索界限内,基于相位搜索间隔数先后等间隔地输出相位偏移角,执行一次步骤(2),并记录每个相位偏移角对应的磁悬浮转子振幅;
6、(4)遍历相位偏移角,比较得到这些相位偏移角中,磁悬浮转子振幅最小值对应的相位偏移角用于后续计算;
7、(5)保持步骤(4)得到的相位偏移角不变,以一定的步长搜索补偿幅值,每次改变补偿幅值后,都执行一次步骤(2),并比较当前磁悬浮转子振幅和改变之前磁悬浮转子振幅;基于比较结果,改变补偿幅值搜索方向,直到达到最大搜索次数;
8、(6)缩小相位偏移角的搜索界限同时保持相位搜索间隔数不变,缩小补偿幅值搜索步长,将步骤(4)得到的相位偏移角作为新的起始相位偏移角,步骤(5)得到的补偿幅值作为新的起始补偿幅值,返回步骤(3)重新进行幅值相位搜索;
9、(7)基于补偿幅值和相位偏移角对自适应滤波器的输出进行修正,将修正后的结果汇入到磁悬浮轴承控制系统中,经过磁悬浮轴承控制器计算得到控制电流,将控制电流输出到磁悬浮轴承的定子线圈中,从而产生一个能和振动激励源相互抵消的悬浮力,进而抑制磁悬浮转子的振动幅值。
10、进一步地,磁悬浮转子系统的激励源引起的振幅vin计算方式如下:
11、
12、其中,m1为两次调整所间隔的周期数,t为扰动信号的周期,y为自适应滤波器的输出。
13、进一步地,步骤(2)具体为:判定磁悬浮转子系统的激励源产生的振幅vin是否小于需求的目标值videal,若满足要求,维持原来的补偿幅值a和相位偏移角φ,否则进行幅值相位搜索。
14、进一步地,步骤(3)中,在起始相位偏移角φ0的一个邻域[-u+φ0,+φ0]内找到n+1个等间隔的相位偏移角并输出,第i次调整输出的相位偏移角φ(i)为:
15、
16、其中,n为相位搜索间隔数,u为相位搜索界限,φ0为起始相位偏移角。
17、进一步地,步骤(4)中,遍历相位偏移角,求出转子振幅的最小值vmin和对应的自变量imin,令起始相位偏移角φ0等于vmin对应的相位偏移角,则φ0的迭代公式为:
18、
19、其中,(φ0)n为第n次迭代得到的相位偏移角。
20、进一步地,步骤(5)中,需要定义搜索方向为增大或减小,以步长stepa搜索补偿幅值,比较上一个补偿幅值对应的转子振幅vlast和当前补偿幅值对应的转子振幅vin,若vin<vlast,则当前搜索方向有利于减小转子振幅,继续沿着当前搜索方向前进;若vin>vlast,则当前搜索方向会导致转子振幅增大,应该改变补偿幅值的搜索方向;补偿幅值的迭代公式为:
21、(a)m+1=(a)m+stepa×sgn(vlast-vin)
22、其中,(a)m为第m次迭代得到的补偿幅值。
23、进一步地,步骤(6)中,以收敛系数α,β减小相位偏移角的搜索界限u和补偿幅值的搜索步长stepa,u、stepa迭代公式为:
24、(u)h+1=α(u)h
25、(stepa)h+1=β(stepa)h
26、其中,(u)h为第h次减小后的相位偏移角的搜索界限,(stepa)h为第h次减小后的补偿幅值的搜索步长;α,β的取值范围为(0,1)。
27、本发明的有益效果:
28、1.本发明原理简单、易于实现、抑振效果明显、能确保磁悬浮轴承系统在宽转速范围内稳定运行。
29、2.本发明使用的算法不需要得到系统的精确模型和参数、不需要测量转子相位角,适用于大多数刚性磁悬浮轴承转子,可移植性强。本发明通过引入收敛系数,不断缩小补偿幅值和相位偏移角的搜索范围,兼顾了搜索速度和精度,且在调节过程中稳定性较好。
30、3.本发明需要调节的参数较少,且调节简单,不需要大量的参数整定即可获得较好的抑振效果。
31、4.对同一系统,每次搜索得到的补偿幅值和相位偏移角基本一致,即对相同频率的扰动,首次搜索后得到的补偿幅值和相位偏移角,后续可以通过查表法直接使用,不需再次搜索即可达到相同的抑振效果。对于高次谐波,可以并联结构相同的若干个抑振单元以实现同时抑制不同频率干扰的效果。
- 还没有人留言评论。精彩留言会获得点赞!