一种高精度定位装置及其定位方法与流程
本发明涉及光纤授时信号定位,具体为一种高精度定位装置及其定位方法。
背景技术:
1、国内清华大学和中国计量院联合进行了光纤时频传递技术的早期研究,并进行了试验验证,该研究只得到了频率传递的结果。2003年前后,中国科学院国家授时中心通过光纤传递时间信息,分析了利用光纤信道或者扩频技术实现纳秒级时间同步精度的可能性,论证了单纤闭环时间频率信号同时传输方案,并于2010年在100km 光纤上完成了实验验证。上海交通大学通过改造后的irig-b协议编码传输时间信号,实现了100km 光纤链路标准差小于27ps的指标。北京大学对基于锁模激光器的稳定光频率传输展开了深入研究,通过直接调节锁模激光器光脉冲相位的方式补偿光纤链路的相位抖动,于2012年 在22km 传 输 链 路 上 达 到 了3.7×10-14/s的稳定度。上述的研究基本都是频率传递技术的研究,没有实现最重要的高精度时间传递;
2、现阶段光频原子钟的不准确度已经达到了10-18量级,而基于卫星的频率同步手段最多能达到10-15/day的量级。考虑到光纤链路这一信息传输通道具有抗电磁干扰、传输损耗小等优点,比卫星通信利用的自由空间电磁波通道更加理想。基于光纤链路的时间和频率信号的传输与同步研究得到了国内外多家计量科研机构的重视和投入;
3、与卫星上的twstft方法相比,光纤上的时间双向传递比对不用考虑卫星转发、多径效应、几何路径不对称、电离层对流层扰动等因素的影响,但也要面对一些光纤链路中出现的新问题。比如两站所使用的激光器波长和偏振的不同会造成传输路径不对称;加入光学器件后,系统的标定难度也会比纯电子微波器件的标定难度更大;光学器件在面对温度波动、磁场变化等外界扰动时也可能更易受影响;卫星传输中的sagnac效应在光纤传输时依然存在等。
4、这里要说明的是如果使用业界常见的方法如光纤授时传感器1和2同时发射信号来对监测点110定位,那么由于监测点110时常处于运动之中,而l1和l2往往不相等,由此两个检测仪的信号不能同时到达监测点110,从而对监测点110的测量就不准确,另外就是为了确保光纤授时传感器发射的光纤授时信号始终要垂直与两个反射面,当监测点110移动后就需要光纤授时传感器同步调整角度,但传统的光纤授时信号距离测试仪调整安装调试步骤复杂,降低了整体测距效率。
技术实现思路
1、本发明的目的在于提供一种高精度定位装置及其定位方法,以解决了背景技术中所提到技术问题。
2、本发明的目的可以通过以下技术方案实现:
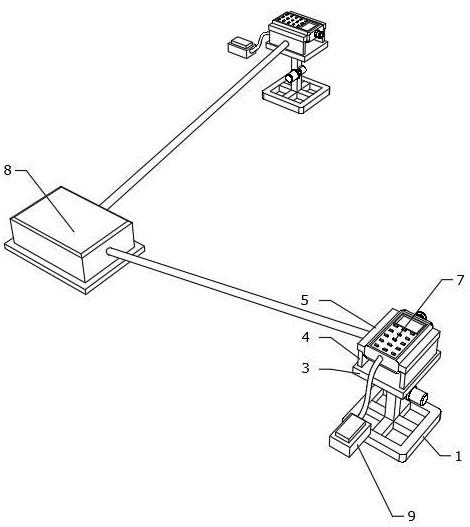
3、一种高精度定位装置,包括两个基座,两个所述基座的顶端垂直固定安装有立柱,两个所述立柱的顶端垂直固定安装有顶座,两个所述顶座的顶端均垂直固定安装有两个固定座,两个所述固定座相向一侧固定安装安装座,两个所述立柱的外侧壁固定安装伺服电机,两个并列的所述固定座之间设置有光纤授时传感器,两个所述光纤授时传感器之间设置有定位控制器,所述定位控制器与两个光纤授时传感器信号连接,两个所述光纤授时传感器均信号连接有延迟器。
4、作为本发明进一步的方案:所述基座的下底四个边角处均安装万向轮,四个所述万向轮规格一致且同时与地面滚动接触,所述基座的顶端贯穿下底开设有安装腔,所述安装腔的四个内腔壁中心位置均垂直固定安装有底座,四个所述底座以及立柱下底共同滑动插入有挤压定位块。
5、作为本发明进一步的方案:所述立柱的底端所述立柱内转动安装蜗轮和蜗杆,所述蜗轮和蜗杆啮合安装,所述蜗轮的下底圆心位置垂直固定连接有螺纹轴,所述螺纹轴的外轴壁螺纹套装有螺纹筒,所述螺纹筒的下底和挤压定位块之间垂直固定安装有若干连接杆,所述蜗轮的顶端圆心位置垂直固定连接有转动轴。
6、作为本发明进一步的方案:所述顶座内转动安装齿轮,所述转动轴的顶端转动贯穿伸入至顶座内,且垂直固定安装在齿轮的下底圆心位置,所述齿轮的外环壁啮合安装两个齿条,两个所述齿条关于顶座呈中心对称分布,两个所述齿条相远离一端均固定连接拉绳,所述顶座内转动安装两个第一定滑轮,两个所述连接拉绳分别绕过对应的第一定滑轮并伸入至对应的固定座内。
7、作为本发明进一步的方案:两个所述安装座两相对内侧壁均开设有收纳槽,两个所述收纳槽内均相适配的设置有挤压块,两个所述安装座内均安装有弹簧和第二定滑轮,两个所述弹簧相向一端分别垂直固定安装在对应挤压块相远离一侧的中心位置,两个所述弹簧另一端均设置有第二定滑轮,两个所述拉绳远离对应齿条一端分别绕过对应的第二定滑轮,并从对应弹簧内穿过,且最终固定连接在对应挤压块一侧中心位置,两个所述挤压块分别抵触在光纤授时传感器两相对外侧壁。
8、一种高精度定位方法,首先设置监测点,在监测点部署两个垂直反射面,来反射两个光纤授时传感器的信号,注意两个光纤授时传感器发射的光纤授时信号要垂直与两个反射面,从而两个光纤授时传感器与垂直反射面的距离l和l就是光纤授时信号实际走过的路程;
9、作为本发明进一步的方案:本发明所述基于光纤授时信号的高精度定位方法如下:
10、核心算法是:定位控制器驱动第一个光纤授时传感器测量出其与监测点110的距离l1,驱动第二个光纤授时传感器测量出其与监测点110的距离l2,这里可以认为声速vs对于l1和l2是一样的,于是得到测量仪1的信号传输时间是: t1=l1/vs
11、同理得到t2=l2/vs
12、如果t1>t2,那么延迟器1的值为0,延迟器2的值为t1-t2;
13、如果t1<t2,那么延迟器1的值为t2-t1,延迟器2的值为0;
14、这里使用2个延迟器来实现,是因为延迟器实现较为容易,也是业界常见的技术,如果使用超前/延迟器件,那么只需要部署一个;
15、经过上述的设定,可以实现光纤授时传感器1和光纤授时传感器2到达监测点的时间是一致的。定位控制器可以设置时钟源,按照测量频次的要求通过2个测量仪对监测点进行测量,得到l1’和l2’。已知光纤授时传感器1的坐标是(x1,y1),光纤授时传感器2的坐标是(x2,y2),待测监测点110的位置是(x,y),那么就有:
16、
17、解上述方程就可以得到(x,y),也就是监测点的实时坐标。解方程的方式很多,常见的是牛顿迭代法,这里不再赘述;
18、按你的处理流程或程序的流程图进行描述即可,主要应当体现出各步骤在时间上的先后次序。
19、本发明的有益效果:
20、首先,通过启动伺服电机带动蜗杆旋转,进而带动蜗轮旋转,也就通过转动轴带动齿轮旋转,进而同时带动两个齿条旋转,通过拉绳分别拉动对应的弹簧收缩并将对应挤压块收缩回收纳槽内,再将光纤授时传感器放置在安装座上,并通过反向启动伺服电机,最终释放拉绳,也就使得弹簧恢复形状并推动对应挤压块挤压在光纤授时传感器的两侧,快速完成光纤授时传感器的安装固定,与此同时,蜗轮的旋转也会带动螺纹轴旋转,进而使得螺纹筒下降高度,最终推动挤压定位块向下位移直至与地面相抵触,本发明具有减少操作步骤,提高整体测距效率的特点;
21、其次,采用本发明所述方法和装置,与现有技术相比,解决了监测点高精度定位时监测点如果处于移动之中,需要源信号同时到达监测点的难题,提高监测点的定位精确度。
- 还没有人留言评论。精彩留言会获得点赞!