一种装载机闭锁式液力变矩器的控制系统
本发明属于智能控制,具体涉及一种装载机闭锁式液力变矩器的控制系统。
背景技术:
1、工程机械是一种广泛应用于道路施工、工程建设及矿山运输等领域的动力设备,在我国经济和社会发展中发挥着重要作用,但其存在能耗高、效率低、驾驶舒适性差等问题,在复杂工况下尤甚。装载机作为典型的工程机械,其机械液力传动系统由发动机,液力变矩器、变速箱、驱动桥等部件共同组成,液力变矩器利用油液的流动传递动力,实现了发动机与变速箱之间的“柔性”连接,保证了装载机的平稳起步、变速和增扭,衰减发动机及传动系统的扭振、降低冲击,但液力传动最大的缺点是传动效率低。因此,目前装载机中广泛采用的是闭锁式液力变矩器,其是在液力变矩器中加入了锁止离合器,通过对锁止离合器解闭锁控制,使变矩器的工作状态在液力和机械工况之间转换,以提高燃油经济性,但是解闭锁控制过程的冲击度大,导致整机平顺性较差。
2、但锁止离合器解闭锁控制过程的冲击度大,对整车行驶平顺性影响较大,即装载机存在燃油经济性与行驶平顺性的矛盾。
技术实现思路
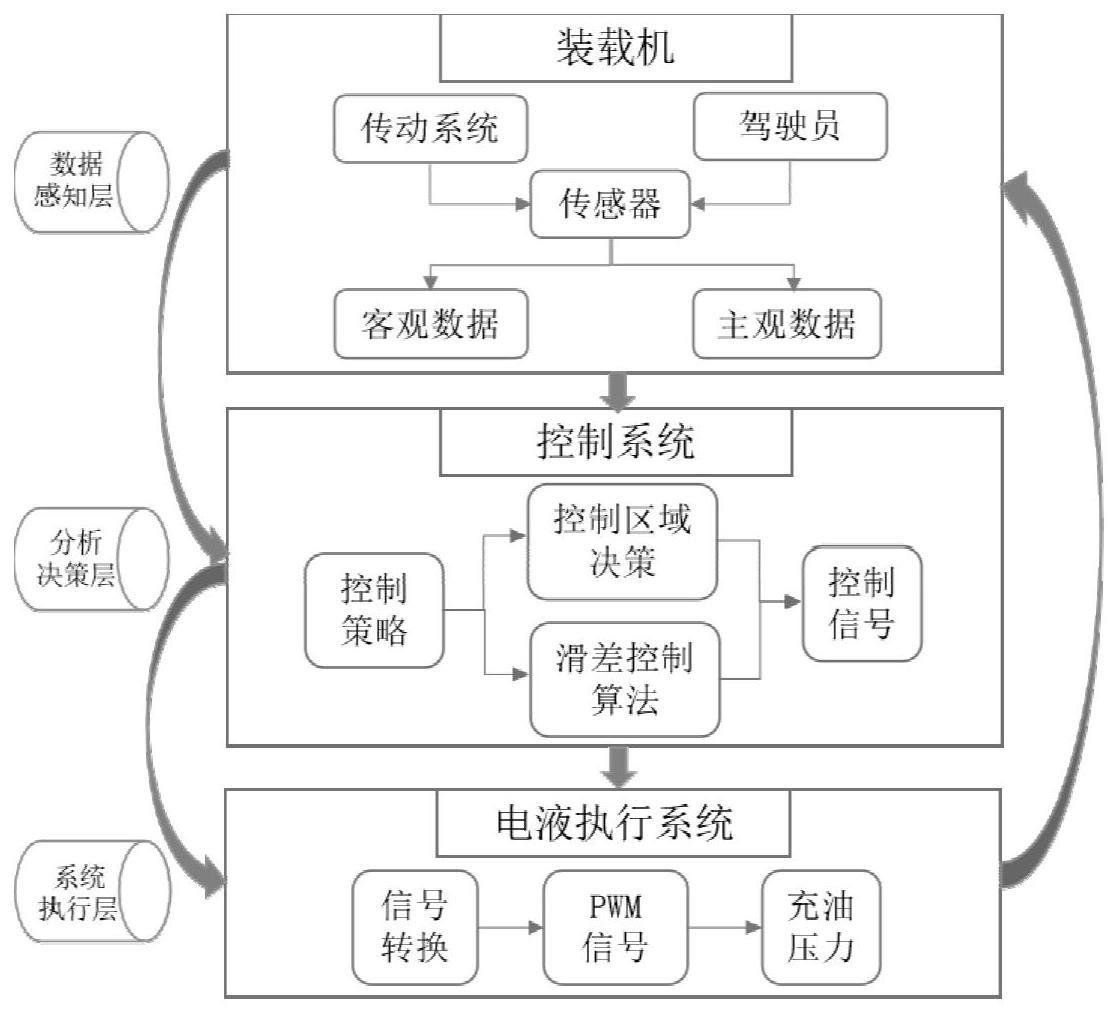
1、为了解决现有技术中的问题,本发明提供了一种装载机闭锁式液力变矩器的控制系统,所述控制系统包括:数据感知层、分析决策层和系统执行层,
2、数据感知层,用于获取装载机在不同工况下的运行数据和操作数据,并将数据传输到分析决策层,
3、分析决策层,包括液力变矩器的控制策略模块和控制区域决策模块,结合接收到的装载机运转数据并以液力变矩器的控制策略为基础,通过控制区域决策的决策结果确定液力变矩器的需求工况,并将需求工况控制指令下发至系统执行层,
4、系统执行层,包括电液执行系统,接收分析决策层下发的控制指令,通过电液执行系统来控制液力变矩器中锁止离合器的动作。
5、进一步地,所述数据感知层通过安装于装载机中的发动机转速传感器、油门踏板开度传感器、挡位传感器、车速传感器来获取装载机在液力、滑差和机械三种不同工况下的运行数据包括:发动机转速和车速,以及驾驶员操作装载机产生的操作数据包括:油门踏板开度和挡位。
6、进一步地,所述系统执行层通过电磁阀实现电磁信号的转换控制电液执行系统输出充油压力来进一步控制液力变矩器中的锁止离合器摩擦片的开合,
7、当处于液力工况时,电液执行系统会驱使锁止离合器处于解锁状态,
8、当处于机械工况时,电液执行系统会驱使锁止离合器处于闭锁状态,
9、当处于滑差工况时,电液执行系统会进行滑差控制,驱使锁止离合器处于滑摩状态,主、从动盘跟随目标滑差转速转动。
10、进一步地,液力变矩器的控制策略的具体步骤为:
11、首先,定义flag=1、flag=2、flag=3分别代表液力变矩器的液力、滑差、机械工况的控制指令,
12、紧接着,在开启控制前的预检查,分析发动机暖机信号、传感器故障信号、油温和换挡信号均是否满足发动机的启动条件,
13、若不满足启动条件,直接输出工况控制指令flag=1到电液执行系统,以使驱使锁止离合器处于解锁状态,令液力变矩器进入液力工况,
14、若满足启动条件,则进入控制区域决策模块和转换子策略模块,根据两模块的决策结果输出当前时刻经修正后的液力变矩器的工况,输出相应的工况控制指令,
15、当输出的工况控制指令是flag=2,,即表明决策结果是滑差工况,此时需激活滑差控制子策略模块,对液力变矩器锁止离合器进行模糊推理神经网络滑差控制。
16、进一步地,控制区域决策模块的决策方法的具体步骤包括:
17、(1)确定控制区域决策因素集与评价集
18、因素集的建立:
19、设定因素集为u,则,u={发动机转速u1,油门踏板开度u2,转速比u3,挡位u4,车速u5},
20、评价集的建立:
21、设定评价集为v,闭锁式液力变矩器的三种工况均作为评价子集vj,则,
22、v={液力v1,滑差v2,机械v3};
23、(2)建立模糊一致性的判断矩阵
24、通过评价对象对各因素的支配作用,比较各因素两两之间对评价对象的影响程度,由此构成判断矩阵ai,表示为:
25、
26、式中,rmn表示因素集u中第m个影响因素相对第n个因素的重要程度,
27、判断矩阵的构造有时会出现“a比b重要,b比c重要,c比a重要”这样的异常情况,故需对n阶判断矩阵进行一致性检验:
28、
29、式中:n为判断矩阵行数或列数;λmax为判断矩阵的最大特征值,
30、计算判断矩阵的随机一致性比例cr:
31、
32、式中,ri为随机一致性指标,当cr<0.1时,表示判断矩阵所设权重系数合理。
33、(3)建立因素集权向量
34、对判断矩阵最大特征值所对应的特征向量归一化处理,得到该影响因素的权向量ai,
35、
36、(4)控制区域的模糊综合算法
37、首先,建立控制区域模糊关系矩阵,
38、模糊关系矩阵反映的是因素集u和评价集v之间的一种模糊关系,建立模糊关系矩阵的关键是确定各因素相对于评价集的隶属度,若论域u中任一元素x,都有一个数a(x)∈(0,1),则称a(x)为x对a的隶属度,a是论域u的模糊集,用a(x)表示x属于a的程度的高低,
39、对因素集中的第i个因素ui进行评价时,其相对评价集v中第j个元素vj的隶属度为rij,将各因素ui转换为隶属向量ri,表示为:
40、ri=(ri1,ri2,lrij)
41、建立模糊关系矩阵r,表示为:
42、
43、其次,模糊综合评价就是在模糊关系矩阵r的基础上,考虑各因素的权重ai,来反映所有因素的综合影响,表示为b:
44、
45、其中,o为综合评价算子,
46、采用最大隶属度原则,考虑最大指标的贡献,确定当前时刻闭锁式液力变矩器的需求工况决策结果s(t):
47、s(t)=vj(t)=maxbj(t)
48、若s(t)=v2(t),装载机闭锁式液力变矩器需求工况的决策结果为滑差工况,该区域进行滑差控制,该区域也称滑差控制区域,
49、若s(t)=v1(t),装载机闭锁式液力变矩器需求工况的决策结果为液力工况,该区域进行解锁控制,该区域也称液力控制区域;
50、若s(t)=v3(t),装载机闭锁式液力变矩器需求工况的决策结果为机械工况,该区域进行闭锁控制,该区域也称机械控制区域。
51、进一步地,模糊推理神经网络滑差控制的控制方法的实现过程为:
52、当滑差控制子策略模块接收到滑差工况控制指令激活后,通过读出的当前时刻的液力变矩器的实际滑差转速和油门踏板的开度值,将其输入到目标滑差转速的模糊推理系统,输出期望的目标滑差转速作为bp神经网络控制器的目标量,将期望的目标滑差转速与实际滑差转速进行运算后得到的偏差值e,一起输入bp神经网络控制器中,进行滑差转速期望值的跟随,实现装载机闭锁式液力变矩器的滑差控制。
53、进一步地,所述转换子策略模块的转换子策略方法的具体步骤为:
54、以控制区域策略的控制区域的模糊综合算法的输出为依据,输出当前时刻液力变矩器的需求工况s(t),以t为信号采样间隔,结合上一采样时刻的需求工况s(t-t)和锁止离合器在滑差控制阶段的滑摩功w通过逻辑判断实现不同工况之间的转换,
55、设定从液力工况到机械工况必须经过滑差工况,以降低锁止离合器接合时的冲击度,在滑差工况下,为延长锁止离合器的寿命,利用许用滑摩功[w]作为判断信号,若锁止离合器滑差控制阶段的滑摩功w超过许用滑摩功[w],则液力变矩器退出滑差工况,立即转为液力工况,在锁止离合器的油温达到正常范围前禁止再次启动,
56、通过输出转换子策略修正后的液力变矩器的工况控制指令,来确定当前时刻的液力变矩器的工况。
57、进一步地,电液执行系统中的电液执行子策略模块接收来自控制区域决策与转换子策略模块输出的液力变矩器当前时刻的工况控制指令,以对应的pwm波的形式输出占空比信号,
58、当控制指令为flag=2的滑差工况时,以滑差控制子策略的扭矩控制量信号为输入,结合锁止离合器处于滑摩状态时的滑摩力矩公式以及电液执行系统接合压力与占空比的函数关系,通过数学转换计算得到滑差工况下占空比信号;
59、当控制指令为flag=1的液力工况输出pwm=0,
60、当控制指令为flag=3的机械工况输出pwm=1,
61、通过将pwm信号输入到电液执行系统的电磁阀,经由液压执行回路将控制电信号转换为压力信号,对锁止离合器的充油压力进行调节,实现装载机闭锁式液力变矩器的工况控制。
62、与现有技术相比,本发明的有益效果为:
63、(1)针对目前装载机闭锁式液力变矩器只有“液力-机械”两个工况,本发明给装载机闭锁式液力变矩器加入了滑差工况,提出了“液力-滑差-机械”三工况的装载机闭锁式液力变矩器滑差控制系统的三工况控制区域决策方法,滑差工况控制方法以及整个控制系统的控制策略。
64、(2)针对液力变矩器液力、滑差和机械三工况控制区域边界不明晰的问题,提出综合考虑发动机转速、油门踏板开度、转速比、挡位和车速的液力变矩器五参数控制区域模糊综合决策方法,建立了从装载机五参数到液力变矩器需求工况输出的智能黑箱模型,实现了对闭锁式液力变矩器需求工况的动态决策。
65、(3)针对液力变矩器锁止离合器接合冲击度大,装载机滑差控制要求高的问题,提出了模糊推理神经网络滑差控制方法,与神经网络控制方法对比后得出,本发明通过模糊推理神经网络控制方法能将液力变矩器锁止离合器接合冲击度最大值降低了79.95%。
66、(4)利用模糊综合评价法,利用发动机转速、油门踏板开度、转速比、挡位和车速五参数决策装载机闭锁式液力变矩器的工况;利用模糊推理法,通过实际滑差转速和油门踏板开度模糊推理控制目标量,以降低滑差工况时的冲击度,结合bp神经网络pid实现滑差控制;研究了“液力-滑差-机械”三工况的转换原理,结合上述工况模糊综合决策法和模糊推理神经网络滑差控制法,建立控制系统的控制策略。
67、(5)通过本发明的控制系统可以使装载机闭锁式液力变矩器滑差控制系统在保证燃油经济性的同时,提高整机行驶平顺性,为液力变矩器三工况过程的自动控制提供理论基础,为解决装载机燃油经济性与行驶平顺性的矛盾提供技术支撑。
- 还没有人留言评论。精彩留言会获得点赞!