一种非开挖施工下顶管姿态的纠偏方法与流程
本发明属于地下工程的,具体涉及一种非开挖施工下顶管姿态的纠偏方法。
背景技术:
1、在地下隧道施工前,设计单位会提前规划隧道的施工路径,通常以隧道横截面的中心曲线代表掘进轨迹方向。掘进刀盘沿着隧道横截面的轴线前进,当发现掘进刀盘与规划的轨迹发生偏差时,需要对其进行姿态调整,其偏差包括水平和垂直偏差。隧道轴线是工程坐标系下建立的,因此想要获得掘进过程中顶管中心的位置,需要建立随着顶管机顶进的目标坐标系,通过在目标坐标系中的管道中心与棱镜坐标的关系,得出其在工程坐标系下的实时位置。此外,顶管轨迹是比较复杂的,故需要对顶管轨迹进行分类处理。
技术实现思路
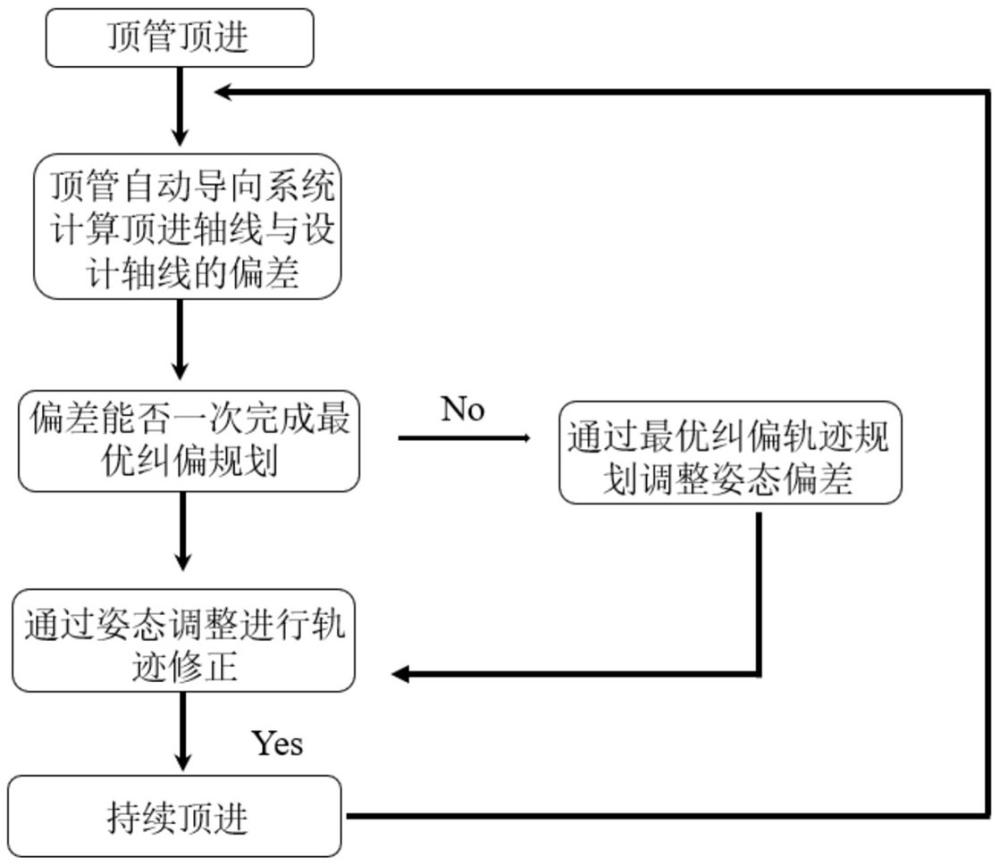
1、本发明的目的是根据上述现有技术的不足之处,提供一种非开挖施工下顶管姿态的纠偏方法,顶管机每完成一节管道的顶进,顶管自动导向系统会测量产生偏差的管首和管尾坐标,从而计算出顶管轴线与设计轴线的偏角,当偏角小于顶管机设定的最小偏差时,不用对其轨迹进行实时调整,但偏角大于设定的最小偏差值时,根据能否一次完成轨迹优化作为界限采取轨迹纠偏规划,从而实现对顶管姿态的纠偏处理。
2、本发明目的实现由以下技术方案完成:
3、一种非开挖施工下顶管姿态的纠偏方法,其特征在于所述纠偏方法包括以下步骤:
4、s1:通过测量系统获得顶管机上的目标棱镜在工程坐标系中的坐标;
5、s2:以顶管中心为原点建立顶管机的目标坐标系,基于所述目标棱镜在所述工程坐标系中的坐标和在所述目标坐标系中的坐标间的关系,对所述目标坐标系与所述工程坐标系之间进行转化,得到顶管在所述工程坐标系下的轨迹;
6、s3:对顶管轨迹进行分类处理,顶管轨迹分为直线段轨迹模型、圆曲线段轨迹模型以及缓和曲线模型;
7、s4:计算顶管轴线与设计顶管轴线之间的偏差,若偏差大于设定的最小偏差值时,对顶管轨迹进行修正。
8、所述测量系统包括一个布置于工作井处的后视棱镜以及设置于隧道内的若干全站仪,每个所述全站仪上方均设置有一个棱镜;所述后视棱镜作为起点,所述全站仪作为中继点,以获得所述目标棱镜在所述工程坐标系中的坐标。
9、步骤s2中所述目标坐标系与所述工程坐标系之间转化方法的步骤如下:
10、所述工程坐标系原点为o,三轴分别为x轴、y轴、z轴,所述目标坐标系原点为ob,三轴分别为xb轴、yb轴、zb轴,将所述工程坐标系记作n系,所述目标坐标系记作b系,对所述工程坐标系和所述目标坐标系进行姿态(α,β,γ)和位移w(wxob,wyob,wzob)的转化;
11、以ob为旋转点,obxb绕着xb轴逆时针旋转角度γ,旋转后的yb轴平行于o-xy平面;
12、绕x轴的旋转矩阵为其在n系上的投影为:
13、
14、其旋转矩阵如下式:
15、
16、obys绕着yb轴逆时针旋转角度β,旋转后的xb轴与o-xy平面平行,ob-xbyb与o-xy平面平行;
17、绕y轴旋转的旋转矩阵如下式:
18、
19、obzb绕着zb轴顺时针旋转角度α,绕z轴旋转的旋转矩阵如下式:
20、
21、假设b系上有一点p(xp,yp,zp),则p点在n系上的转换坐标表示为:
22、
23、
24、式中,为p点在n系上的坐标,表示b系到n系的旋转矩阵,p点代表n系在b系上的投影;
25、所述目标坐标系与所述工程坐标系经过姿态角的转化,坐标轴相互平行,此时只存在位移之间的差值,将其进行坐标转化,用向量表示p点为为所述目标坐标系在所述工程坐标系中原点的向量表示,平移变量为坐标转换后的新坐标向量表示值,根据向量运算三角形法则有:
26、
27、将旋转矩阵公式代入得所述目标坐标系与所述工程坐标系间的转换公式:
28、
29、式中,m为缩放系数,为三个角度α、β、γ的转换矩阵,(xn,yn,zn)为p点在新坐标系中的坐标值。
30、步骤s3中的所述直线段轨迹模型为:
31、直线段起点a坐标(xa,ya),第二点b坐标(xb,yb),线路方位角为θ距离a点里程为l的一点p坐标为:
32、xp=xa+l·cosθ;
33、yp=ya+l·sinθ;
34、得出某点(xn,yn)的位置信息为:
35、
36、
37、步骤s3中的所述圆曲线段轨迹模型为:
38、以设计轴线方向区分左右,假定ac方向方位角为θ1,cb方向方位角为θ2,那么管节间的转角α=θ1-θ2通过转折角的正负来判断圆曲线的偏转方向,当转角大于0时,曲线偏向右侧,转角小于0时,曲线偏向左侧;
39、分别已知a、b、c的坐标时,求ac任意一点坐标(xi,yi),假设a为圆曲线起点,任一点到a的弧长为li,任一点的坐标可表示为:
40、
41、
42、式中,r为圆曲线半径;
43、对其进行旋转矩阵转化可得所述工程坐标系下的坐标值:
44、
45、任一点到a的弧长为l-li,其坐标表示为:
46、
47、
48、求解圆曲线ab上一点坐标p,可用向量进行计算,圆心o到圆曲线起点a表示为向量其坐标为(xa-xo,ya-yo),向量旋转角度αp得到向量由三角形法则得
49、
50、任一点坐标p公式为:
51、
52、步骤s3中的所述缓和曲线模型为:
53、采用回旋线作为缓和曲线,回旋线半径从无限大变化到某设计值的一段弧线,其表达式如下:
54、
55、式中,c为常数,代表缓和曲线半径的变化,c=l·ρ,l为回旋线某点到起点的弧长,ρ为回旋线上某点半径,当l等于使用的缓和曲线长度ls时,此时的缓和曲线半径为圆曲线半径,c=r·ls;
56、对回旋线参数进行计算,曲线上任一点p切线与x轴夹角为切线角β,在p处取一段微分长度为dl的弧线,所对应的中心角为dβ,对其进行积分运算有:
57、
58、
59、缓和曲线终点b作切线与x轴的夹角方位角β0,当l=ls时,缓和曲线全长ls所形成的中心角即为方位角β0,即:
60、
61、假设缓和曲线起点a为原点,过该点的切线为x轴,符合右手坐标系,曲线上任选一点p,其微分段弧长投影方程为:
62、
63、将式中cosβ、sinβ按级数展开,代入:
64、
65、
66、并对其进行积分并略其高次项得缓和曲线参数方程:
67、
68、对缓和曲线参数方程进行坐标转换,将所述目标坐标系转换为所述工程坐标系,根据缓和曲线的不同连接类型进行坐标转换。
69、本发明的优点是:分析并计算了顶管设计轴线与隧道设计轴线的三维空间关系,介绍空间坐标转换原理和算法模型在自动导向系统中的应用,提出单棱镜顶管自动导向技术对顶管轨迹进行测量,利用顶管自身的纠偏系统进行复核,结合现场测量偏差值可发现曲线顶管轨迹得到较好的控制;根据顶管纠偏轨迹的原理,采用二次曲线来代表顶管的纠偏轨迹曲线,通过计算得出纠偏角与顶管轨迹偏离量之间的关系,对顶管曲线轨迹进行了分类,并对直线线型、圆弧线型和缓和曲线线型给出了详细的计算。
- 还没有人留言评论。精彩留言会获得点赞!