变速器的拨叉位置修正方法、装置及车辆与流程
本技术涉及车辆领域,并且更具体地,涉及车辆领域中一种变速器的拨叉位置修正方法、装置及车辆。
背景技术:
1、新能源车辆发展迅速,为满足客户对经济性和动力性的需求,两挡变速器得到广泛应用。其中,换挡拨叉是关键部件之一,用于控制挡位的切换。通常通过拨叉位置传感器检测拨叉位置,以确定当前挡位。然而,由于传感器精度偏差、系统误差和机械磨损等原因,拨叉位置可能存在误差。这会对换挡品质产生重大影响,甚至导致噪音和换挡失败。因此,换挡系统需要通过重新自学习拨叉位置,以获取拨叉位置的真实位置。
2、相关技术中,拨叉位置自学习常用的方法是通过分别施加向第一挡侧和第二挡侧的换挡力,获取第一挡位硬止点和第二挡位硬止点位置,绝对空挡位置为第一挡硬止点和第二挡硬止点位置的中位。
3、然而,上述的自学习方法是在换挡过程中通过到达硬止点位置来实现拨叉位置修正,若车辆一直在挡且不满足升降挡条件时,则无法实现拨叉位置修正,并且上述的自学习方法会产生一定的撞击噪音、加快换挡系统的磨损,同时也存在自学习失败的风险,亟待解决。
技术实现思路
1、本技术提供了一种变速器的拨叉位置修正方法、装置及车辆,该方法通过在挡条件下对拨叉位置进行校验,检测到拨叉位置发生偏移后通过自适应的方法实现修正,解决了通过到达挡位硬止点的自学习方法会产生撞击噪音、加快换挡系统磨损的问题,减少了因自学习产生的撞击噪音和换挡系统的磨损,延长了换挡系统使用寿命。
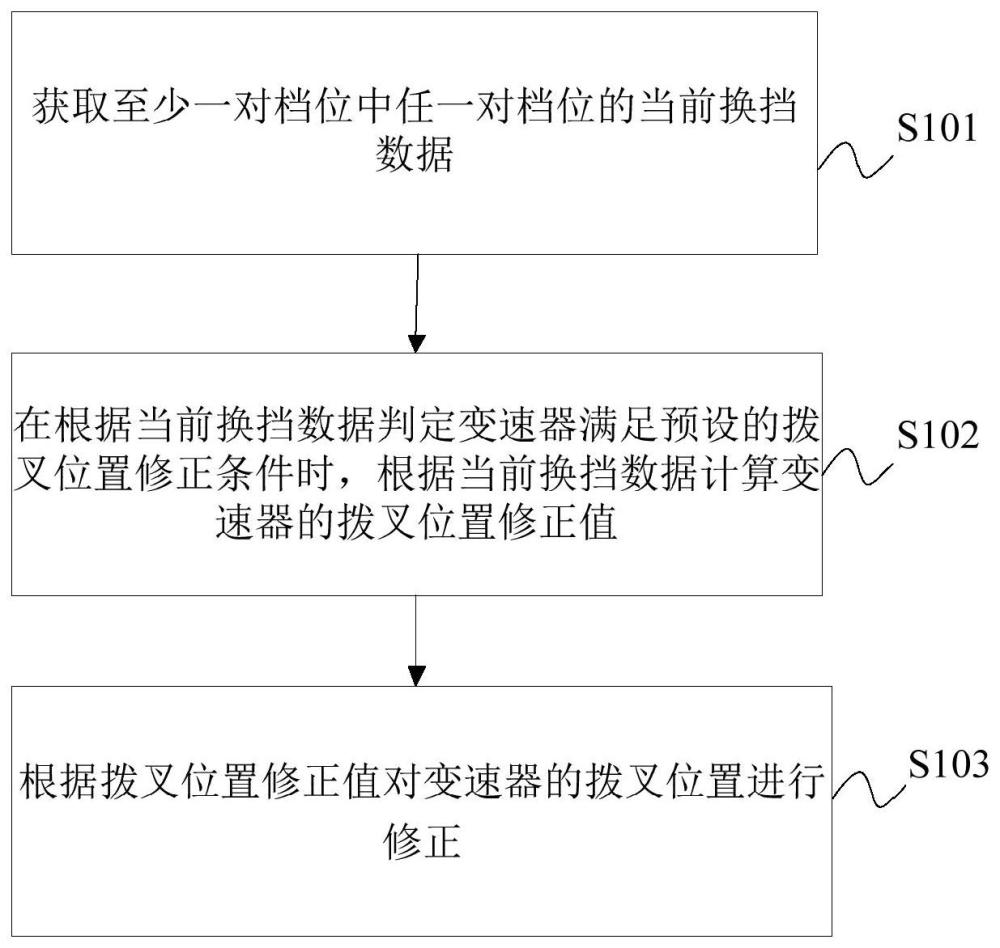
2、第一方面,提供了一种变速器的拨叉位置修正方法,所述变速器包括至少一对档位,其中,所述方法包括以下步骤:获取所述至少一对档位中任一对档位的当前换挡数据;
3、在根据所述当前换挡数据判定所述变速器满足预设的拨叉位置修正条件时,根据所述当前换挡数据计算所述变速器的拨叉位置修正值;以及
4、根据所述拨叉位置修正值对所述变速器的拨叉位置进行修正。
5、通过上述技术方案,通过当前换挡数据对拨叉位置进行校验,检测到拨叉位置发生偏移后通过自适应的方法实现修正,解决了通过到达挡位硬止点的自学习方法会产生撞击噪音、加快换挡系统磨损的问题,减少了因自学习产生的撞击噪音和换挡系统的磨损,延长了换挡系统使用寿命。
6、结合第一方面,在某些可能的实现方式中,所述当前换挡数据包括当前累积换挡次数、当前挡位偏移标志位、当前拨叉计算位置和当前挡位总行程中的至少一种。
7、通过上述的技术方案,当前换挡数据包括当前累积换挡次数、当前挡位偏移标志位、当前拨叉计算位置和当前挡位总行程中的至少一种,可以实时监测车辆的换挡情况,了解车辆变速器的工作状态。
8、结合第一方面和上述实现方式,在某些可能的实现方式中,在获取所述至少一对档位中任一对档位的当前换挡数据之后,还包括:
9、判断所述当前累积换挡次数是否小于或等于预设次数,或者所述当前挡位偏移标志位是否为非自学习标志位;
10、若所述当前累积换挡次数小于或等于预设次数,或者所述当前挡位偏移标志位为所述非自学习标志位,则判定所述当前换挡数据判定所述变速器满足所述预设的拨叉位置修正条件。
11、通过上述的技术方案,通过对当前累积换挡次数和挡位偏移标志位的判断,不依赖其他复杂的传感器或测量仪器,准确快速地判断是否满足拨叉位置修正条件,过程简单且计算量较小,提高了系统的响应速度,并减少了处理时间。
12、结合第一方面和上述实现方式,在某些可能的实现方式中,所述根据所述当前换挡数据计算所述变速器的拨叉位置修正值,包括:
13、计算所述当前拨叉计算位置与所述当前挡位总行程的第一预设倍数之间的第一差值;
14、在所述第一差值大于第一预设阈值,且所述当前拨叉计算位置大于第二预设阈值时,将第一预设修正值与第一计数值的乘积作为所述拨叉位置修正值;
15、在所述第一差值大于第一预设阈值,且所述当前拨叉计算位置小于或等于所述第二预设阈值时,将第二预设修正值与第二计数值的乘积作为所述拨叉位置修正值。
16、通过上述的技术方案,设定第一预设倍数和第一预设阈值,可以根据实际需求,灵活地设定调整的条件和范围,并且将计算的当前拨叉计算位置与当前挡位总行程的第一差值与第一预设阈值进行比较,进而可以确定是否需要进行自适应调整。当第一差值大于第一预设阈值时,将当前拨叉计算位置与第二预设阈值进行比较,从而根据具体情况,确定相应的拨叉位置修正值,提高拨叉位置修正的效率。
17、结合第一方面和上述实现方式,在某些可能的实现方式中,所述根据所述拨叉位置修正值对所述变速器的拨叉位置进行修正,包括:
18、若所述第一差值大于所述第一预设阈值且所述当前拨叉计算位置大于所述第二预设阈值,则根据所述当前拨叉计算位置和所述拨叉位置修正值的差值得到当前拨叉实际位置;
19、若所述第一差值大于所述第一预设阈值且所述当前拨叉计算位置小于或等于所述第二预设阈值,则根据所述当前拨叉计算位置和所述拨叉位置修正值的和值得到所述当前拨叉实际位置。
20、通过上述的技术方案,根据不同的情况进行灵活的位置修正,根据拨叉计算位置和拨叉位置修正值的差值或和值得到当前拨叉实际位置,从而实现对拨叉位置灵活地自适应调整,使其更加适应实际情况,进一步提高了拨叉位置修正的精确性,同时,这种修正策略的实施相对简单,易于实现和维护。
21、结合第一方面和上述实现方式,在某些可能的实现方式中,在根据所述拨叉位置修正值对所述变速器的拨叉位置进行修正之后,还包括:
22、判断车辆是否接收到下电信号;
23、若所述车辆接收到所述下电信号,则存储所述当前拨叉实际位置,并将所述当前挡位偏移标志位置为自学习标志位;否则,重新获取新的当前累积换挡次数、新的当前挡位偏移标志位、新的当前拨叉计算位置和新的当前挡位总行程。
24、通过上述的技术方案,通过实时判断车辆是否接收到下电信号,能够及时更新和存储当前拨叉实际位置,并对挡位偏移标志进行设置,实现及时的存储和更新操作,将当前挡位偏移标志位置为自学习标志位,便于自动学习和记录当前拨叉实际位置,从而提供挡位的准确参考,重新获取新的当前累积换挡次数、新的当前挡位偏移标志位、新的当前拨叉计算位置和新的当前挡位总行程,能够保证数据的准确性和精准度,提高拨叉位置修正的精确性。
25、结合第一方面和上述实现方式,在某些可能的实现方式中,在获取所述变速器的当前换挡数据之后,还包括:
26、判断所述当前累积换挡次数是否大于预设次数,且所述当前挡位偏移标志位是否为所述自学习标志位;
27、若所述当前累积换挡次数大于所述预设次数,且所述当前挡位偏移标志位为所述自学习标志位,则根据预设的自学习策略确定所述变速器的绝对空挡位置。
28、通过上述的技术方案,在获取变速器的当前换挡数据后,比较当前累积换挡次数和预设次数,以及判断当前挡位偏移标志位是否为自学习标志位,从而确定变速器的绝对空档位置。
29、结合第一方面和上述实现方式,在某些可能的实现方式中,所述根据预设的自学习策略确定所述变速器的绝对空挡位置,包括:
30、通过施加向第一挡侧的换挡力,推动拨叉至所述第一挡上限位置且保持第一预设时长,得到第一挡位硬止点位置;
31、通过施加向第二挡侧的换挡力,推动拨叉至所述第二挡上限位置且保持第二预设时长,得到第二挡位硬止点位置;
32、若所述第一挡位硬止点位置和所述第二挡位硬止点位置之间的总行程大于挡位总行程最小预设值,则将所述第一挡位硬止点位置和所述第二挡位硬止点之间的中位位置作为绝对空挡位置,并将所述当前挡位偏移标志位为所述非自学习标志位。
33、通过上述的技术方案,施加向第一挡侧和第二挡侧的换挡力,可以精确地推动拨叉至所需的挡位上限位置,并且保持预设的时长,可以得到第一挡位和第二挡位的硬止点位置,从而确定挡位的准确位置。如果第一挡位硬止点位置和第二挡位硬止点位置之间的总行程大于挡位总行程最小预设值,以这两个硬止点的中位位置作为绝对空挡位置,可以确保空挡位置的准确性。
34、根据本技术实施例的变速器的拨叉位置修正方法,获取至少一对档位中任一对档位的当前换挡数据;在根据当前换挡数据判定变速器满足预设的拨叉位置修正条件时,根据当前换挡数据计算变速器的拨叉位置修正值;根据拨叉位置修正值对变速器的拨叉位置进行修正。通过当前换挡数据对拨叉位置进行校验,检测到拨叉位置发生偏移后通过自适应的方法实现修正,解决了通过到达挡位硬止点的自学习方法会产生撞击噪音、加快换挡系统磨损的问题,减少了挡位自学习的频次,降低了自学习失败的风险,同时减少了因自学习产生的撞击噪音和换挡系统的磨损,延长了换挡系统使用寿命。
35、第二方面,提供了一种变速器的拨叉位置修正装置,所述变速器包括至少一对档位,其中,所述装置包括:
36、获取模块,用于获取所述至少一对档位中任一对档位的当前换挡数据;
37、处理模块,用于在根据所述当前换挡数据判定所述变速器满足预设的拨叉位置修正条件时,根据所述当前换挡数据计算所述变速器的拨叉位置修正值;以及
38、修正模块,用于根据所述拨叉位置修正值对所述变速器的拨叉位置进行修正。
39、结合第二方面,在某些可能的实现方式中,所述当前换挡数据包括当前累积换挡次数、当前挡位偏移标志位、当前拨叉计算位置和当前挡位总行程中的至少一种。
40、结合第二方面和上述实现方式,在某些可能的实现方式中,所述获取模块,还包括:
41、判断所述当前累积换挡次数是否小于或等于预设次数,或者所述当前挡位偏移标志位是否为非自学习标志位;
42、若所述当前累积换挡次数小于或等于预设次数,或者所述当前挡位偏移标志位为所述非自学习标志位,则判定所述当前换挡数据判定所述变速器满足所述预设的拨叉位置修正条件。
43、结合第二方面和上述实现方式,在某些可能的实现方式中,所述处理模块,包括:
44、计算所述当前拨叉计算位置与所述当前挡位总行程的第一预设倍数之间的第一差值;
45、在所述第一差值大于第一预设阈值,且所述当前拨叉计算位置大于第二预设阈值时,将第一预设修正值与第一计数值的乘积作为所述拨叉位置修正值;
46、在所述第一差值大于第一预设阈值,且所述当前拨叉计算位置小于或等于所述第二预设阈值时,将第二预设修正值与第二计数值的乘积作为所述拨叉位置修正值。
47、结合第二方面和上述实现方式,在某些可能的实现方式中,所述修正模块,包括:
48、若所述第一差值大于所述第一预设阈值且所述当前拨叉计算位置大于所述第二预设阈值,则根据所述当前拨叉计算位置和所述拨叉位置修正值的差值得到当前拨叉实际位置;
49、若所述第一差值大于所述第一预设阈值且所述当前拨叉计算位置小于或等于所述第二预设阈值,则根据所述当前拨叉计算位置和所述拨叉位置修正值的和值得到所述当前拨叉实际位置。
50、结合第二方面和上述实现方式,在某些可能的实现方式中,在根据所述拨叉位置修正值对所述变速器的拨叉位置进行修正之后,还包括:
51、判断车辆是否接收到下电信号;
52、若所述车辆接收到所述下电信号,则存储所述当前拨叉实际位置,并将所述当前挡位偏移标志位置为自学习标志位;否则,重新获取新的当前累积换挡次数、新的当前挡位偏移标志位、新的当前拨叉计算位置和新的当前挡位总行程。
53、结合第二方面和上述实现方式,在某些可能的实现方式中,在获取所述变速器的当前换挡数据之后,还包括:
54、判断所述当前累积换挡次数是否大于所述预设次数且所述当前挡位偏移标志位是否为自学习标志位;
55、若所述当前累积换挡次数大于所述预设次数且所述当前挡位偏移标志位为所述自学习标志位,则根据预设的自学习策略确定所述变速器的绝对空挡位置。
56、结合第二方面和上述实现方式,在某些可能的实现方式中,所述根据预设的自学习策略确定所述变速器的绝对空挡位置,包括:
57、通过施加向第一挡侧的换挡力,推动拨叉至所述第一挡上限位置且保持第一预设时长,得到第一挡位硬止点位置;
58、通过施加向第二挡侧的换挡力,推动拨叉至所述第二挡上限位置且保持第二预设时长,得到第二挡位硬止点位置;
59、若所述第一挡位硬止点位置和所述第二挡位硬止点位置之间的总行程大于挡位总行程最小预设值,则将所述第一挡位硬止点位置和所述第二挡位硬止点之间的中位位置作为绝对空挡位置,并将所述当前挡位偏移标志位为所述非自学习标志位。
60、根据本技术实施例的变速器的拨叉位置修正装置,用于获取至少一对档位中任一对档位的当前换挡数据;在根据当前换挡数据判定变速器满足预设的拨叉位置修正条件时,根据当前换挡数据计算变速器的拨叉位置修正值;根据拨叉位置修正值对变速器的拨叉位置进行修正。通过当前换挡数据对拨叉位置进行校验,检测到拨叉位置发生偏移后通过自适应的方法实现修正,解决了通过到达挡位硬止点的自学习方法会产生撞击噪音、加快换挡系统磨损的问题,减少了挡位自学习的频次,降低了自学习失败的风险,同时减少了因自学习产生的撞击噪音和换挡系统的磨损,延长了换挡系统使用寿命。
61、第三方面,提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的变速器的拨叉位置修正装置。
- 还没有人留言评论。精彩留言会获得点赞!