车辆挡位控制方法、装置、设备及存储介质与流程
本技术涉及车辆,特别涉及一种车辆挡位控制方法、装置、设备及存储介质。
背景技术:
1、电动汽车是以车载电源为动力驱动的车辆。目前,电动汽车同时设置有驻车挡位锁止机构和电子驻车制动系统,这两套机构采用不同的控制策略,均可使车辆实现驻车功能,两者互不影响。如若取消驻车挡位锁止机构,则车辆在驻车挡位时将无法实现驻车功能,而一个车辆中同时设置这两套机构无疑会增加车辆成本。因此,如何既能降低车辆成本,又能使车辆在驻车挡位时实现驻车功能成为了当前研究的重点。
技术实现思路
1、本技术实施例提供了一种车辆挡位控制方法、装置、设备及存储介质,该方法既能降低车辆成本,又能使车辆在驻车挡位时实现驻车功能。所述技术方案如下:
2、一方面,提供了一种车辆挡位控制方法,所述方法包括:
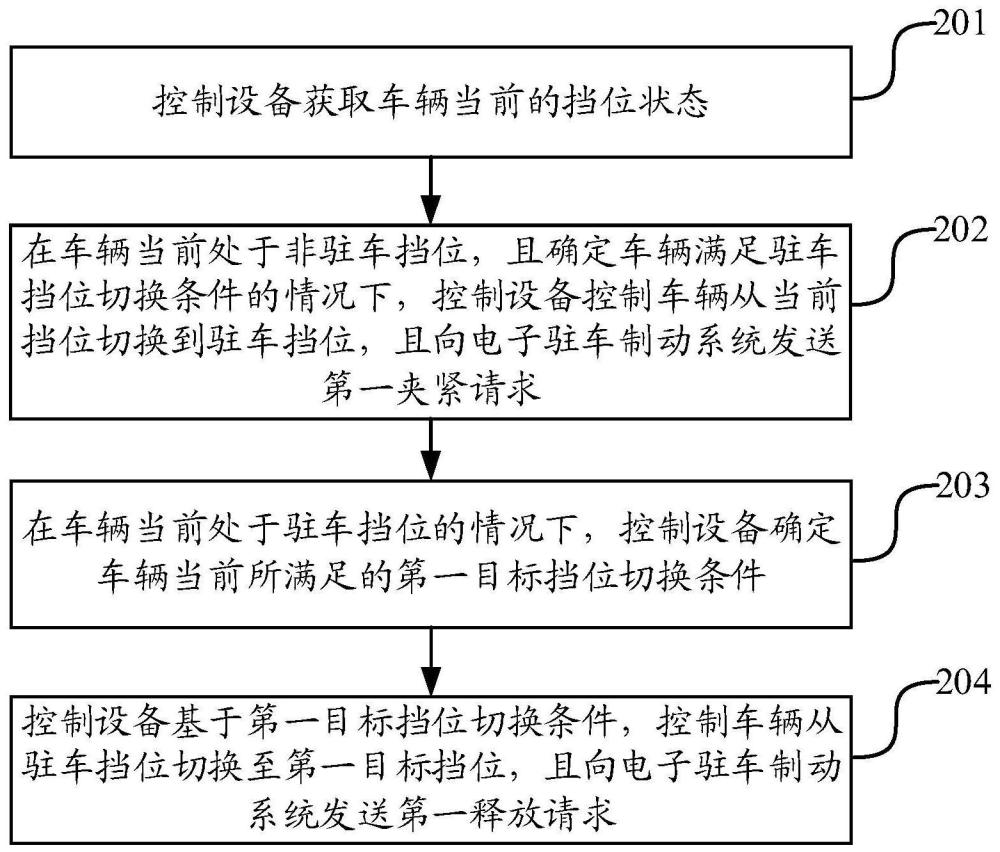
3、获取车辆当前的挡位状态;
4、在所述车辆当前处于非驻车挡位,且确定所述车辆满足驻车挡位切换条件的情况下,控制所述车辆从当前挡位切换到驻车挡位,且向电子驻车制动系统发送第一夹紧请求,所述电子驻车制动系统用于基于所述第一夹紧请求控制所述车辆驻车;
5、在所述车辆当前处于驻车挡位的情况下,确定所述车辆当前所满足的第一目标挡位切换条件;
6、基于所述第一目标挡位切换条件,控制所述车辆从驻车挡位切换至第一目标挡位,且向所述电子驻车制动系统发送第一释放请求,所述电子驻车制动系统用于基于所述第一释放请求控制所述车辆取消驻车,所述第一目标挡位为所述第一目标挡位切换条件对应的挡位。
7、在一种可能的实现方式中,所述在所述车辆当前处于驻车挡位的情况下,确定所述车辆当前所满足的第一目标挡位切换条件,包括:
8、在所述车辆当前处于驻车挡位,且所述车辆处于启动状态的情况下,确定所述车辆当前所处道路的坡度和上下坡状态中的至少一项;
9、在所述坡度小于第一预设坡度的情况下,确定所述车辆当前所满足的第一目标挡位切换条件为第一切换条件或者第二切换条件,所述第一切换条件为前进挡位对应的切换条件,所述第二切换条件为倒车挡位对应的切换条件;
10、在所述坡度大于第二预设坡度,且所述车辆处于上坡状态的情况下,确定所述车辆当前所满足的第一目标挡位切换条件为所述第二切换条件;
11、在所述坡度大于第二预设坡度,且所述车辆处于下坡状态的情况下,确定所述车辆当前所满足的第一目标挡位切换条件为所述第一切换条件。
12、在另一种可能的实现方式中,所述在所述车辆当前处于驻车挡位的情况下,确定所述车辆当前所满足的第一目标挡位切换条件,包括:
13、在所述车辆当前处于驻车挡位,且所述车辆处于启动状态的情况下,确定所述车辆当前所处的功能模式;
14、在所述车辆处于洗车或者拖车模式下,确定所述车辆当前所满足的第一目标挡位切换条件为第三切换条件,所述第三切换条件为空挡位对应的切换条件。
15、在另一种可能的实现方式中,所述方法还包括:
16、在所述车辆当前处于非驻车挡位,且所述车辆处于启动状态的情况下,获取所述车辆的速度;在所述速度小于第一预设速度的情况下,确定所述车辆满足所述驻车挡位切换条件;
17、在所述车辆当前处于非驻车挡位,且电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件。
18、在另一种可能的实现方式中,所述在所述车辆当前处于非驻车挡位,且电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件,包括:
19、在所述车辆当前处于空挡位,且所述电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件;
20、在所述车辆当前处于前进挡位或者倒车挡位,所述车辆处于上电状态,且所述电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件。
21、在另一种可能的实现方式中,所述方法还包括:
22、在所述车辆当前处于空挡位,且所述车辆处于启动状态,所述电子驻车制动系统处于夹紧状态的情况下,确定所述车辆当前所处道路的坡度和上下坡状态中的至少一项;
23、基于所述车辆当前所处道路的坡度和上下坡状态中的至少一项,确定所述车辆当前所满足的第二目标挡位切换条件;
24、基于所述第二目标挡位切换条件,控制所述车辆从所述空挡位切换至第二目标挡位,且向所述电子驻车制动系统发送第二释放请求,所述电子驻车制动系统用于基于所述第二释放请求控制所述车辆取消驻车,所述第二目标挡位为所述第二目标挡位切换条件对应的挡位,且所述第二目标挡位为前进挡位或者倒车挡位。
25、另一方面,提供了一种车辆挡位控制装置,所述装置包括:
26、获取模块,用于获取车辆当前的挡位状态;
27、第一控制模块,用于在所述车辆当前处于非驻车挡位,且确定所述车辆满足驻车挡位切换条件的情况下,控制所述车辆从当前挡位切换到驻车挡位,且向电子驻车制动系统发送第一夹紧请求,所述电子驻车制动系统用于基于所述第一夹紧请求控制所述车辆驻车;
28、第一确定模块,用于在所述车辆当前处于驻车挡位的情况下,确定所述车辆当前所满足的第一目标挡位切换条件;
29、第二控制模块,用于基于所述第一目标挡位切换条件,控制所述车辆从驻车挡位切换至第一目标挡位,且向所述电子驻车制动系统发送第一释放请求,所述电子驻车制动系统用于基于所述第一释放请求控制所述车辆取消驻车,所述第一目标挡位为所述第一目标挡位切换条件对应的挡位。
30、在一种可能的实现方式中,所述第一确定模块,用于在所述车辆当前处于驻车挡位,且所述车辆处于启动状态的情况下,确定所述车辆当前所处道路的坡度和上下坡状态中的至少一项;在所述坡度小于第一预设坡度的情况下,确定所述车辆当前所满足的第一目标挡位切换条件为第一切换条件或者第二切换条件,所述第一切换条件为前进挡位对应的切换条件,所述第二切换条件为倒车挡位对应的切换条件;在所述坡度大于第二预设坡度,且所述车辆处于上坡状态的情况下,确定所述车辆当前所满足的第一目标挡位切换条件为所述第二切换条件;在所述坡度大于第二预设坡度,且所述车辆处于下坡状态的情况下,确定所述车辆当前所满足的第一目标挡位切换条件为所述第一切换条件。
31、在另一种可能的实现方式中,所述第一确定模块,用于在所述车辆当前处于驻车挡位,且所述车辆处于启动状态的情况下,确定所述车辆当前所处的功能模式;在所述车辆处于洗车或者拖车模式下,确定所述车辆当前所满足的第一目标挡位切换条件为第三切换条件,所述第三切换条件为空挡位对应的切换条件。
32、在另一种可能的实现方式中,所述装置还包括:
33、第二确定模块,用于在所述车辆当前处于非驻车挡位,且所述车辆处于启动状态的情况下,获取所述车辆的速度;在所述速度小于第一预设速度的情况下,确定所述车辆满足所述驻车挡位切换条件;在所述车辆当前处于非驻车挡位,且电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件。
34、在另一种可能的实现方式中,所述第二确定模块,用于在所述车辆当前处于空挡位,且所述电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件;在所述车辆当前处于前进挡位或者倒车挡位,所述车辆处于上电状态,且所述电源与充电枪或者逆变枪连接的情况下,确定所述车辆满足所述驻车挡位切换条件。
35、在另一种可能的实现方式中,所述装置还包括:
36、第三确定模块,用于在所述车辆当前处于空挡位,且所述车辆处于启动状态,所述电子驻车制动系统处于夹紧状态的情况下,确定所述车辆当前所处道路的坡度和上下坡状态中的至少一项;
37、第四确定模块,用于基于所述车辆当前所处道路的坡度和上下坡状态中的至少一项,确定所述车辆当前所满足的第二目标挡位切换条件;
38、第三控制模块,用于基于所述第二目标挡位切换条件,控制所述车辆从所述空挡位切换至第二目标挡位,且向所述电子驻车制动系统发送第二释放请求,所述电子驻车制动系统用于基于所述第二释放请求控制所述车辆取消驻车,所述第二目标挡位为所述第二目标挡位切换条件对应的挡位,且所述第二目标挡位为前进挡位或者倒车挡位。
39、另一方面,提供了一种控制设备,所述控制设备包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以实现上述任一项所述的车辆挡位控制方法。
40、另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以实现上述任一项所述的车辆挡位控制方法。
41、另一方面,提供了一种计算机程序产品,所述计算机程序产品中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以实现上述任一项所述的车辆挡位控制方法。
42、本技术实施例提供了一种车辆挡位控制方法,该方法在车辆由非驻车挡位切换至驻车挡位时,通过电子驻车制动系统控制车辆驻车,在车辆由驻车挡位切换至非驻车挡位时,通过电子驻车制动系统取消车辆驻车。由此可知,该方法取消了驻车挡位锁止机构,使用电子驻车制动系统来代替驻车挡位锁止机构,在驻车挡位与非驻车挡位之间进行切换时,实现电子驻车制动系统的联动,这样既可以降低车辆成本,又能使车辆在驻车挡位时实现驻车功能。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!