自动变速器的换挡控制方法、装置、设备及存储介质与流程
本技术涉及车辆,特别是涉及一种自动变速器的换挡控制方法、装置、计算机设备及存储介质。
背景技术:
1、目前商用车上配置有多挡机械式自动变速器,可以有效针对整车动力源输出进行降速增扭,提高整车的动力性以及燃油经济性。多挡机械式自动变速器,是在传统的手动变速器(amt)上添加变速器控制器、换挡等执行机构以及输入轴转速传感器等来实现自动换挡。多挡机械式自动变速器的工作原理是由传感器获取车辆行驶数据,将实时的车辆行驶数据传给变速器控制单元(tcu),tcu将车辆行驶数据进行处理按照内部控制逻辑将控制信号传给相应执行机构,以此来实现变速器的起步与自动换挡等功能。在自动换挡过程中,较为严重的换挡冲击问题将直接影响驾乘的舒适性,也会缩短变速器关键零部件的使用寿命。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够降低自动换挡过程中换挡冲击度的自动变速器的换挡控制方法、装置、计算机设备及计算机可读存储介质。
2、第一方面,本技术提供了一种自动变速器的换挡控制方法。所述方法包括:
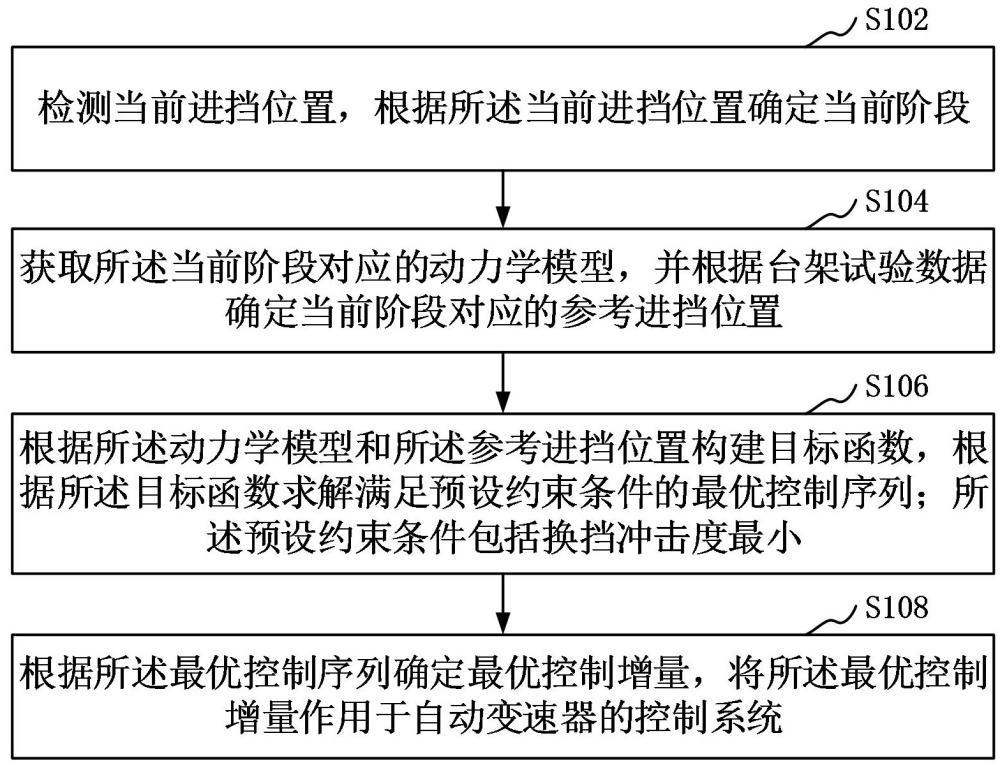
3、检测当前进挡位置,根据所述当前进挡位置确定当前阶段;
4、获取所述当前阶段对应的动力学模型,并根据台架试验数据确定当前阶段对应的参考进挡位置;
5、根据所述动力学模型和所述参考进挡位置构建目标函数,根据所述目标函数求解满足预设约束条件的最优控制序列;所述预设约束条件包括换挡冲击度最小;
6、根据所述最优控制序列确定最优控制增量,将所述最优控制增量作用于自动变速器的控制系统。
7、在其中一个实施例中,所述根据所述动力学模型和所述参考进挡位置构建目标函数,包括:
8、通过所述动力学模型,基于当前状态信息和控制时域的控制增量,构建预测时域的预测状态信息;
9、根据所述预测状态信息和所述当前进挡位置构建预测时域的目标进挡位置;
10、根据所述目标进挡位置和所述参考进挡位置构建目标函数。
11、在其中一个实施例中,所述当前阶段包括消除空行程阶段,所述消除空行程阶段对应的动力学模型为:
12、;
13、其中,为滑动齿套质量,为滑动齿套加速度,为结合套的转动惯量,为结合套的旋转角加速度,为目标挡位齿轮的转动惯量,为目标挡位齿轮的旋转角加速度,为目标挡位齿轮受到的力矩,为滑动齿套受到的力矩,为滑动齿套轴向运动时受到的力矩。
14、在其中一个实施例中,所述当前阶段包括进挡同步阶段,所述进挡同步阶段对应的动力学模型为:
15、;
16、其中,为滑动齿套质量,为滑动齿套加速度,为结合套的转动惯量,为结合套的旋转角加速度,为目标挡位齿轮的转动惯量,为目标挡位齿轮的旋转角加速度,为目标挡位齿轮受到的力矩,为滑动齿套受到的力矩,为滑动齿套轴向运动时受到的力矩,为滑动齿套半轴所受到的力矩,为滑动齿套的等效转动半径,为目标进挡齿轮的等效转动半径,表示正转速差进挡,表示负转速差进挡,为目标挡位齿轮受到的垂直端面的力矩,为目标挡位齿轮的端面摩擦力,为滑动齿套受到的垂直端面的力矩,为滑动齿套的端面摩擦力。
17、在其中一个实施例中,所述当前阶段包括进齿消除空行程阶段,所述进齿消除空行程阶段对应的动力学模型为:
18、;
19、其中,为滑动齿套质量,为滑动齿套加速度,为结合套的转动惯量,为结合套的旋转角加速度,为目标挡位齿轮的转动惯量,为目标挡位齿轮的旋转角加速度,为目标挡位齿轮受到的力矩,为滑动齿套受到的力矩,为滑动齿套轴向运动时受到的力矩。
20、在其中一个实施例中,在当前阶段为消除空行程阶段的情况下,所述根据台架试验数据确定当前阶段对应的参考进挡位置,包括:
21、根据台架试验数据确定当前阶段对应的预估进挡位置;
22、获取道路坡度影响因子、车身质量影响因子以及油门踏板影响因子;
23、根据所述道路坡度影响因子、所述车身质量影响因子以及所述油门踏板影响因子对所述预估进挡位置进行修正,得到参考进挡位置。
24、在其中一个实施例中,所述目标函数为:
25、;
26、其中,为预测时域,为控制时域,为权重系数,为权重矩阵,为控制增量,为目标进挡位置,为参考进挡位置,为时间参数,为松弛因子。
27、第二方面,本技术还提供了一种自动变速器的换挡控制装置。所述装置包括:
28、检测模块,用于检测当前进挡位置,根据所述当前进挡位置确定当前阶段;
29、获取模块,用于获取所述当前阶段对应的动力学模型,并根据台架试验数据确定当前阶段对应的参考进挡位置;
30、计算模块,用于根据所述动力学模型和所述参考进挡位置构建目标函数,根据所述目标函数求解满足预设约束条件的最优控制序列;所述预设约束条件包括换挡冲击度最小;
31、控制模块,用于根据所述最优控制序列确定最优控制增量,将所述最优控制增量作用于自动变速器的控制系统。
32、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
33、检测当前进挡位置,根据所述当前进挡位置确定当前阶段;
34、获取所述当前阶段对应的动力学模型,并根据台架试验数据确定当前阶段对应的参考进挡位置;
35、根据所述动力学模型和所述参考进挡位置构建目标函数,根据所述目标函数求解满足预设约束条件的最优控制序列;所述预设约束条件包括换挡冲击度最小;
36、根据所述最优控制序列确定最优控制增量,将所述最优控制增量作用于自动变速器的控制系统。
37、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
38、检测当前进挡位置,根据所述当前进挡位置确定当前阶段;
39、获取所述当前阶段对应的动力学模型,并根据台架试验数据确定当前阶段对应的参考进挡位置;
40、根据所述动力学模型和所述参考进挡位置构建目标函数,根据所述目标函数求解满足预设约束条件的最优控制序列;所述预设约束条件包括换挡冲击度最小;
41、根据所述最优控制序列确定最优控制增量,将所述最优控制增量作用于自动变速器的控制系统。
42、上述自动变速器的换挡控制方法、装置、计算机设备及存储介质,检测当前进挡位置,根据当前进挡位置确定当前阶段;获取当前阶段对应的动力学模型,并根据台架试验数据确定当前阶段对应的参考进挡位置;根据动力学模型和参考进挡位置构建目标函数,根据目标函数求解满足预设约束条件的最优控制序列;预设约束条件包括换挡冲击度最小;根据最优控制序列确定最优控制增量,将最优控制增量作用于自动变速器的控制系统。通过上述方式,能够根据进挡位置确定对应的阶段,使用与阶段对应的动力学模型,提升了动力学模拟的准确性;结合换挡冲击度对约束条件进行设置,保证生成的控制增量产生作用时换挡冲击度最小,提升了换挡的平顺性;在多个控制周期内不断地根据动力学模型修正和求解换挡冲击度小的控制序列,提升了换挡控制的精确性。
- 还没有人留言评论。精彩留言会获得点赞!