满足ASIL-C功能安全目标的电驱动架构及其控制方法与流程
本发明涉及电动汽车电驱动总成设计,具体涉及一种满足asil-c功能安全目标的电驱动架构及其控制方法。
背景技术:
1、随着汽车向电动化、电驱化和自动驾驶方向发展,对于四驱电动汽车,整车对动力需求高时,前后驱同时提供动力。在高速巡航等工况,考虑到整车经济性和续航里程,需要动力中断,整车由四驱模式进入两驱模式,动力中断电驱动总成由电动机模式进入发电机模式。
2、实现动力中断得主要方式有液力变矩器、离合器、同步器和爪式离合器等。
3、2000年5月,国际电工委员会正式发布了iec61508标准,名为《电气/电子/可编程电子安全系统的功能安全》。功能安全前身iec61508标准正式发布,iec61508主要针对由电气/电子/可编程电子部件构成系统或者起安全作用的电气/电子/可编程电子系统(e/e/pe),建立一个覆盖整体安全生命周期基础的评价方法。目的是要针对以电子为基础的安全系统提出一个一致的、合理的技术方案,统筹考虑单独系统(如传感器、通信系统、控制装置、执行器等)中元件与安全系统组合的问题。iec61508标准的核心是风险概念和安全功能。风险是指危害事件频率(或可能性)以及事件后果严重性。通过应用包括e/e/pes或其他技术构成的安全功能,使风险降低到可以容忍的水平。
4、功能安全是从iec61508中派生出来的,主要定位在汽车行业中特定的电气器件、电子设备、可编程电子器件等专门用于汽车领域的部件,旨在提高汽车电子、电气产品功能安全的国际标准。功能安全为汽车安全提供了一个生命周期(管理、开发、生产、经营、运行、报废)理念,并在这些生命周期阶段中提供必要的支持。该标准涵盖功能性安全方面的整体开发过程(包括需求定义、设计、实施、集成、验证、确认和配置),于2011年发布了第1版,2018年发布了第2版。
5、传统电驱动减速箱多为单档或两档减速箱,对于四驱车,兼顾到续航里程,需要在高速巡航、刹车等工况实现动力中断,来增加电动车续航里程。同时整车驾驶对动力性要求高的加速工况可以通过结合提供动力输出。
技术实现思路
1、本发明的目的就是针对上述技术的不足,提供一种满足asil-c功能安全目标的电驱动架构及其控制方法,通过电机驱动换挡毂,采用拨叉同步器方式实现动力断开结合,使得该电驱动总成能满足动力中断和结合,同时电子架构能满足功能安全asil-c目标。
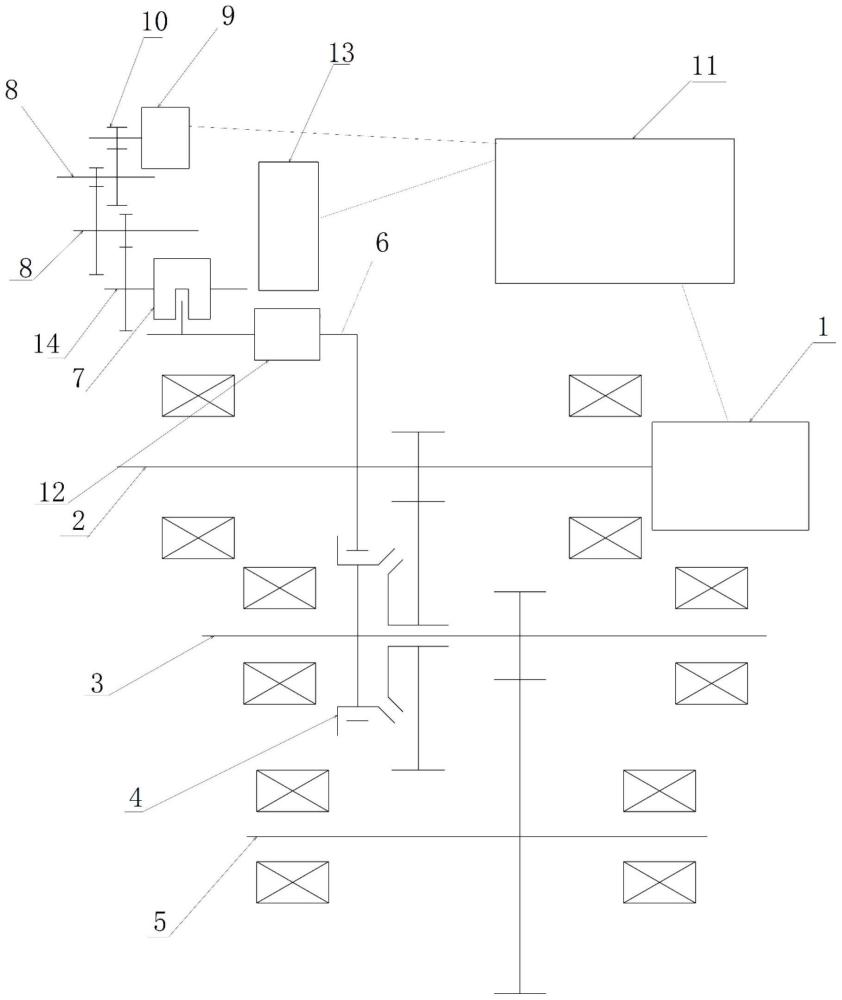
2、为实现上述目的,本发明所设计的满足asil-c功能安全目标的电驱动架构,包括驱动电机和减速箱,所述减速箱的减速箱输入轴与所述驱动电机连接,所述减速箱的减速箱中间轴连有同步器和差速器,所述同步器通过拨叉连有换挡毂,所述换挡毂通过两个双联齿轮连有换挡电机,所述换挡电机与所述驱动电机的电机齿轮相连,还包括与所述驱动电机及换挡电机连接的辅助控制器,所述辅助控制器还连有所述线性位置传感器,所述拨叉上设有与所述线性位置传感器对应的位置传感器磁铁,所述线性位置传感器和位置传感器磁铁的座位校准信号满足asil-a功能安全目标,所述换挡电机上集成有角度传感器,满足asil-b功能安全目标。
3、优选地,在所述换挡毂上设置上止点和下止点,当所述拔叉运动到所述上止点和下止点上时与所述换挡电机的壳体锁止无法进行轴向转动,所述拔叉从上止点运行到下止点时的转动角度为δθ,通过对所述换挡毂进行曲线使所述换挡电机的旋转角度θ1=δθ*i,i为所述换挡电机与换挡毂的速比。
4、优选地,所述辅助控制器根据所述换挡电机的角度闭环控制以及所述线性位置传感器进行校准,确认所述同步器在档状态,并通过所述驱动电机的转速和轮端转速对比判断当前指令是否正确执行。
5、优选地,所述同步器在整车大油门加速或者跑坡起步需要大力矩输出时,处于结合状态,使所述驱动电机作为辅助驱动和主驱单元一起提供动力输出到整车轮端。
6、优选地,所述同步器在整车处于匀速或者高速巡航时,处于断开状态,所述驱动电机不提供动力输出。
7、一种满足asil-c功能安全目标的电驱动架构的控制方法,当驾驶员脚踩油门,给整车油门踏板信号时,整车将油门信号发送至所述辅助控制器,所述辅助控制器向所述驱动电机发出电机扭矩请求信号,所述辅助控制器接收到所述驱动电机的确认信号后,计算出所述驱动电机需要的电流,并将电流指令发送至电池包,所述电池包接收到电流指令后通过母线和igbt转换成所述驱动电机需要的三相电流为所述驱动电机提供电力,所述辅助控制器调节所述驱动电机的转速增加直至与整车的车速匹配;当所述辅助控制器检测到整车轮速通过速比还原后与所述驱动电机的转速差小于设定转速阈值时,所述辅助控制器向所述换挡电机发出结合指令,所述换挡电机换挡转动,使所述同步器的齿套与所述减速箱中间轴的结合齿结合,完成所述驱动电机的动力接入,所述辅助控制器根据所述换挡电机的角度闭环控制以及所述线性位置传感器进行校准,确认所述同步器在档状态,并通过所述驱动电机的转速和轮端转速对比判断结合指令是否正确执行。
8、优选地,所述同步器在整车大油门加速或者跑坡起步需要大力矩输出时,处于结合状态,所述辅助控制器向所述换挡电机发出结合指令,所述换挡电机换挡转动,使所述同步器的齿套与所述减速箱中间轴的结合齿结合,完成所述驱动电机的动力接入,使所述驱动电机作为辅助驱动和主驱单元一起提供动力输出到整车轮端。
9、优选地,所述同步器在整车处于匀速或者高速巡航时,处于断开状态,所述辅助控制器向所述换挡电机发出断开指令,所述换挡电机换挡转动,使所述同步器的齿套与所述减速箱中间轴的结合齿断开,所述驱动电机不提供动力输出。
10、优选地,所述转速阈值为200~300rpm。
11、本发明与现有技术相比,具有以下优点:
12、1、通过换挡电机驱动换挡毂完成角度到直线运动转换,最终实现整车层面动力中断和结合;
13、2、功能安全上,线性位置传感器和位置传感器磁铁的座位校准信号满足asil-a功能安全目标,换挡电机上集成有角度传感器,满足asil-b功能安全目标,整个电驱动架构满足asil-c功能安全目标;
14、3、拨叉上设置线性位置传感器和位置传感器磁铁,换挡电机上集成有角度传感器,实现两路独立线号校准,通过功能安全目标分解实现三电asil-c功能安全目标;
15、4、当整车需要大动力输出时,能够将驱动电机和主驱动单元一起提供动力输出到整车轮端。
技术特征:
1.一种满足asil-c功能安全目标的电驱动架构,包括驱动电机(1)和减速箱,所述减速箱的减速箱输入轴(2)与所述驱动电机(1)连接,所述减速箱的减速箱中间轴(3)连有同步器(4)和差速器(5),所述同步器(4)通过拨叉(6)连有换挡毂(7),所述换挡毂(7)通过两个双联齿轮(8)连有换挡电机(9),所述换挡电机(9)与所述驱动电机(1)的电机齿轮(10)相连,其特征在于:还包括与所述驱动电机(1)及换挡电机(9)连接的辅助控制器(11),所述辅助控制器(11)还连有所述线性位置传感器(12),所述拨叉(6)上设有与所述线性位置传感器(12)对应的位置传感器磁铁(13),所述线性位置传感器(12)和位置传感器磁铁(13)的座位校准信号满足asil-a功能安全目标,所述换挡电机(9)上集成有角度传感器,满足asil-b功能安全目标。
2.根据权利要求1所述满足asil-c功能安全目标的电驱动架构,其特征在于:在所述换挡毂(7)上设置上止点和下止点,当所述拔叉(6)运动到所述上止点和下止点上时与所述换挡电机(9)的壳体锁止无法进行轴向转动,所述拔叉(6)从上止点运行到下止点时的转动角度为δθ,通过对所述换挡毂(7)进行曲线使所述换挡电机(9)的旋转角度θ1=δθ*i,i为所述换挡电机(9)与换挡毂(7)的速比。
3.根据权利要求1所述满足asil-c功能安全目标的电驱动架构,其特征在于:所述辅助控制器(11)根据所述换挡电机(9)的角度闭环控制以及所述线性位置传感器(12)进行校准,确认所述同步器(4)在档状态,并通过所述驱动电机(1)的转速和轮端转速对比判断当前指令是否正确执行。
4.根据权利要求1所述满足asil-c功能安全目标的电驱动架构,其特征在于:所述同步器(4)在整车大油门加速或者跑坡起步需要大力矩输出时,处于结合状态,使所述驱动电机(1)作为辅助驱动和主驱单元一起提供动力输出到整车轮端。
5.根据权利要求1所述满足asil-c功能安全目标的电驱动架构,其特征在于:所述同步器(4)在整车处于匀速或者高速巡航时,处于断开状态,所述驱动电机(1)不提供动力输出。
6.一种如权利要求1所述满足asil-c功能安全目标的电驱动架构的控制方法,其特征在于:当驾驶员脚踩油门,给整车油门踏板信号时,整车将油门信号发送至所述辅助控制器(11),所述辅助控制器(11)向所述驱动电机(1)发出电机扭矩请求信号,所述辅助控制器(11)接收到所述驱动电机(1)的确认信号后,计算出所述驱动电机(1)需要的电流,并将电流指令发送至电池包,所述电池包接收到电流指令后通过母线和igbt转换成所述驱动电机(1)需要的三相电流为所述驱动电机(1)提供电力,所述辅助控制器(11)调节所述驱动电机(1)的转速增加直至与整车的车速匹配;当所述辅助控制器(11)检测到整车轮速通过速比还原后与所述驱动电机(1)的转速差小于设定转速阈值时,所述辅助控制器(11)向所述换挡电机(9)发出结合指令,所述换挡电机(9)换挡转动,使所述同步器(4)的齿套与所述减速箱中间轴(3)的结合齿结合,完成所述驱动电机(1)的动力接入,所述辅助控制器(11)根据所述换挡电机(9)的角度闭环控制以及所述线性位置传感器(12)进行校准,确认所述同步器(4)在档状态,并通过所述驱动电机(1)的转速和轮端转速对比判断结合指令是否正确执行。
7.根据权利要求5所述满足asil-c功能安全目标的电驱动架构的控制方法,其特征在于:所述同步器(4)在整车大油门加速或者跑坡起步需要大力矩输出时,处于结合状态,所述辅助控制器(11)向所述换挡电机(9)发出结合指令,所述换挡电机(9)换挡转动,使所述同步器(4)的齿套与所述减速箱中间轴(3)的结合齿结合,完成所述驱动电机(1)的动力接入,使所述驱动电机(1)作为辅助驱动和主驱单元一起提供动力输出到整车轮端。
8.根据权利要求1所述满足asil-c功能安全目标的电驱动架构,其特征在于:所述同步器(4)在整车处于匀速或者高速巡航时,处于断开状态,所述辅助控制器(11)向所述换挡电机(9)发出断开指令,所述换挡电机(9)换挡转动,使所述同步器(4)的齿套与所述减速箱中间轴(3)的结合齿断开,所述驱动电机(1)不提供动力输出。
9.根据权利要求5所述满足asil-c功能安全目标的电驱动架构的控制方法,其特征在于:所述转速阈值为200~300rpm。
技术总结
本发明涉及电动汽车电驱动总成设计技术领域,公开了一种满足ASIL‑C功能安全目标的电驱动架构,包括驱动电机和减速箱,减速箱输入轴与驱动电机连接,减速箱中间轴连有同步器和差速器,同步器通过拨叉连有换挡毂,换挡毂通过两个双联齿轮连有换挡电机,换挡电机与电机齿轮相连,还包括与驱动电机及换挡电机连接的辅助控制器,辅助控制器连有线性位置传感器,拨叉上设有位置传感器磁铁,线性位置传感器满足ASIL‑A,换挡电机上集成有角度传感器,满足ASIL‑B。本发明还公开了一种满足ASIL‑C功能安全目标的电驱动架构的控制方法。本发明满足ASIL‑C功能安全目标的电驱动架构及其控制方法,采用拨叉同步器方式实现动力断开结合,满足动力中断和结合,满足功能安全ASIL‑C目标。
技术研发人员:苏江波,周贝,魏波,莫健琴,睢乐
受保护的技术使用者:智新科技股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!