一种管道机器人的制作方法
本技术涉及管道机器人,尤其是一种管道机器人。
背景技术:
1、现有的管道内壁探伤中常通过采用硬质轮或履带的移动设备将超声波探伤探头移动至管道深处,但是对于管道内壁光滑并且是垂直设计的管道而言,传统的轮式机器人在负载移动时容易出现打滑或是掉落等现象,难以满足安全稳定的探测需求。
技术实现思路
1、本实用新型要解决的技术问题是:为了克服上述中存在的问题,提供了一种管道机器人,其解决了上述等问题。
2、本实用新型解决其技术问题是采取以下技术方案实现的:
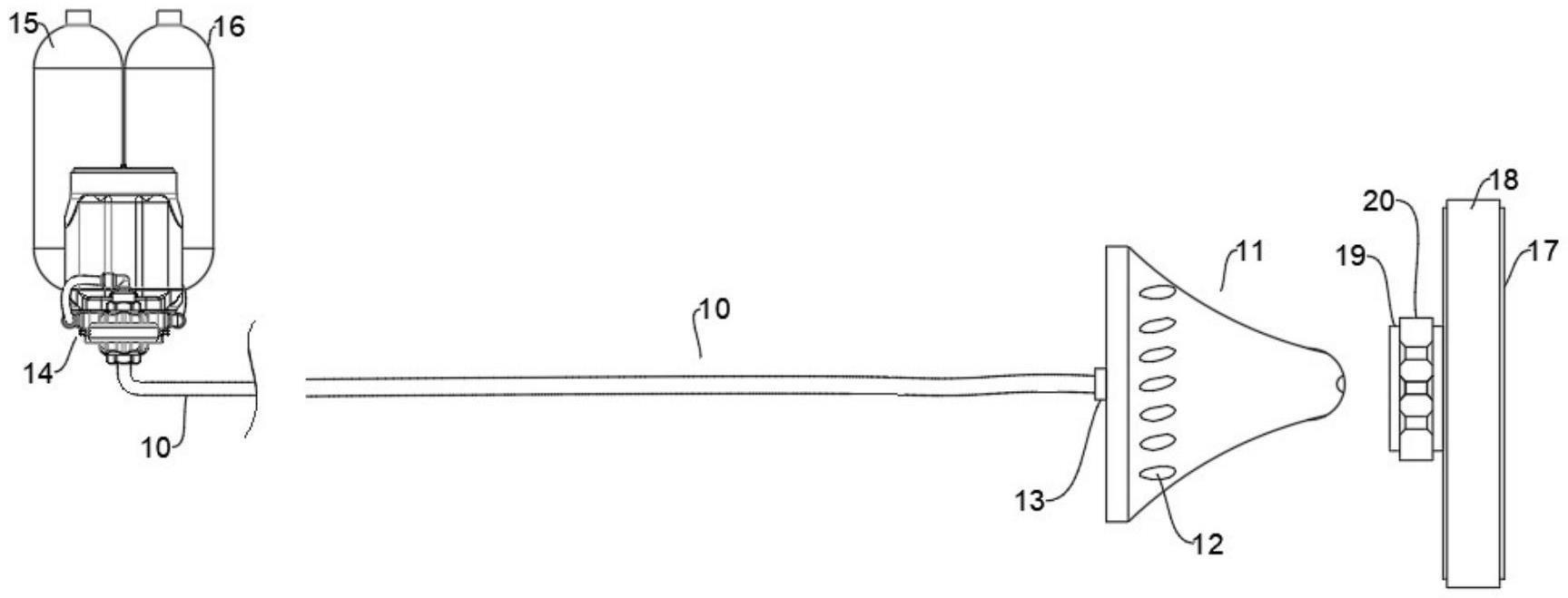
3、一种管道机器人,包括推进头、供压体软管、空压机、气压板,所述气压板的左端面设有凸起的钢珠凸缘架,所述钢珠凸缘架内设有向左敞口的插孔,所述插孔内设有滚动的钢制滚珠,所述推进头的前端呈半球状且其插入所述插孔后与所述钢制滚珠相抵,所述气压板的外圈套装设有可充气的膨胀气囊圈,所述供压体软管的一端通过密封轴承转动设置在所述推进头上且与设置在所述推进头上的气路通道连通,所述供压体软管的另一端与所述空压机的排气口连通,所述空压机的进气口分别与所述压缩喷液储罐以及所述压缩空气储罐连通。
4、优选的,所述气压板上间隔设有前后贯穿的气孔,且每个所述气孔处均设有磁吸贴片进行封堵。
5、优选的,所述气孔以所述气压板的轴线为中心环形阵列间隔设置。
6、优选的,所述推进头的前端弧形面上以所述推进头的轴线为中心环形阵列间隔设有向后敞口的椭圆喷口,所述椭圆喷口与所述供压体软管连通,且所述椭圆喷口的中心轴线的延长线不与所述推进头的中心轴线相交。
7、优选的,所述推进头的尾端以所述推进头的轴线环形阵列间隔固定设有向后敞口的直流喷口,且在所述推进头上间隔固定设有斜置的导流板。
8、优选的,所述钢珠凸缘架的外圈套装固定设有供探伤探头挂设的探伤探头挂载圈。
9、本实用新型的优点和积极效果是:所述空压机通过配比将所述压缩喷液储罐内的液体混合所述压缩空气储罐内的空气加压后由所述供压体软管注入所述推进头并由所述推进头上的所述椭圆喷口或所述直流喷口喷出,进而在喷射的反作用力下是的所述推进头前进并且该过程中所述推进头自转前进并将带有探头的气压板向前顶,所述膨胀气囊圈被充气后与待检测的管道内壁相抵使管道形成密闭空间,通过打开两个对称分布的所述气孔使得空气可以由此排出进而使得所述气压板在管道内稳定的前进,便于探头作业,相比传统的采用硬质移动轮实现移动的设备本装置能有效的防止打滑并且在处理垂直的管道时更加的有效稳定。
技术特征:
1.一种管道机器人,其特征在于:包括推进头(11)、供压体软管(10)、空压机(14)、气压板(17),所述气压板(17)的左端面设有凸起的钢珠凸缘架(19),所述钢珠凸缘架(19)内设有向左敞口的插孔(21),所述插孔(21)内设有滚动的钢制滚珠(22),所述推进头(11)的前端呈半球状且其插入所述插孔(21)后与所述钢制滚珠(22)相抵,所述气压板(17)的外圈套装设有可充气的膨胀气囊圈(18),所述供压体软管(10)的一端通过密封轴承(13)转动设置在所述推进头(11)上且与设置在所述推进头(11)上的气路通道连通,所述供压体软管(10)的另一端与所述空压机(14)的排气口连通,所述空压机(14)的进气口分别与压缩喷液储罐(15)以及压缩空气储罐(16)连通。
2.根据权利要求1所述的一种管道机器人,其特征在于:所述气压板(17)上间隔设有前后贯穿的气孔(25),且每个所述气孔(25)处均设有磁吸贴片进行封堵。
3.根据权利要求2所述的一种管道机器人,其特征在于:所述气孔(25)以所述气压板(17)的轴线为中心环形阵列间隔设置。
4.根据权利要求3所述的一种管道机器人,其特征在于:所述推进头(11)的前端弧形面上以所述推进头(11)的轴线为中心环形阵列间隔设有向后敞口的椭圆喷口(12),所述椭圆喷口(12)与所述供压体软管(10)连通,且所述椭圆喷口(12)的中心轴线的延长线不与所述推进头(11)的中心轴线相交。
5.根据权利要求3所述的一种管道机器人,其特征在于:所述推进头(11)的尾端以所述推进头(11)的轴线环形阵列间隔固定设有向后敞口的直流喷口(24),且在所述推进头(11)上间隔固定设有斜置的导流板(23)。
6.根据权利要求5所述的一种管道机器人,其特征在于:所述钢珠凸缘架(19)的外圈套装固定设有供探伤探头挂设的探伤探头挂载圈(20)。
技术总结
本技术涉及管道机器人技术领域,公开了一种管道机器人,本技术包括推进头、供压体软管、空压机、气压板,气压板的左端面设有凸起的钢珠凸缘架,钢珠凸缘架内设有向左敞口的插孔,插孔内设有滚动的钢制滚珠,推进头的前端呈半球状且其插入插孔后与钢制滚珠相抵,气压板的外圈套装设有可充气的膨胀气囊圈,供压体软管的一端通过密封轴承转动设置在推进头上且与设置在推进头上的气路通道连通。本技术通过空压机通过配比将压缩喷液储罐内的液体混合压缩空气储罐内的空气加压后由供压体软管注入推进头并由推进头上的椭圆喷口或直流喷口喷出,进而在喷射的反作用力下是的推进头前进并且该过程中推进头自转前进并将带有探头的气压板向前顶。
技术研发人员:徐海香
受保护的技术使用者:诸暨晟达工程检测技术有限公司
技术研发日:20230213
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!