一种基于深度学习的现场高风险作业监控装置的制作方法
本技术涉及监控装置,具体为一种基于深度学习的现场高风险作业监控装置。
背景技术:
1、监控装置,即通过摄像探头的作用,来实现对外部环境进行实时监控的装置,其能够将外部监测下来的环境通过传播系统传播或送到监视器上显示出来,现实生活中监控装置的运用非常广泛;
2、例如公开号为cn216531456u的一种高点监控摄像机,通过设置旋转云台、电动伸缩杆、清理板、清理毛刷的配合使用,便于对摄像机主体镜头进行清理,使得在清理时,工作人员通过外界的控制器启动电动伸缩杆,之后使电动伸缩杆带动清理板向上移动,然后在启动旋转云台旋转,从而在旋转云台的旋转下带动摄像机主体旋转,之后在摄像机主体的旋转下使清理毛刷对镜头表面的灰尘进行清理,在清理完成后,通过电动伸缩杆带动清理板下移即可,此方式操作简单,便于对镜头的清理,保证摄像机主体的正常使用,其次通过设置驱蚊灯,便于对蚊虫的驱赶,避免蚊虫叮嘱在摄像机主体上,通过设置防护顶盖,便于对摄像机主体的保护,避免雨水淋湿,通过设置驱鸟器,便于对鸟类的驱赶,避免鸟类在摄像机主体上筑巢;
3、然而上述摄像机在实际的使用过程中,对摄像头本体的防护效果较差,容易受到外界物品的侵蚀,不够实用,存在一定的缺陷;
4、因此我们便提出了基于深度学习的现场高风险作业监控装置能够很好的解决以上问题。
技术实现思路
1、本实用新型的目的在于提供一种基于深度学习的现场高风险作业监控装置,以解决上述背景技术提出上述摄像机在实际的使用过程中,对摄像头本体的防护效果较差,容易受到外界物品的侵蚀,不够实用,存在一定的缺陷的问题。
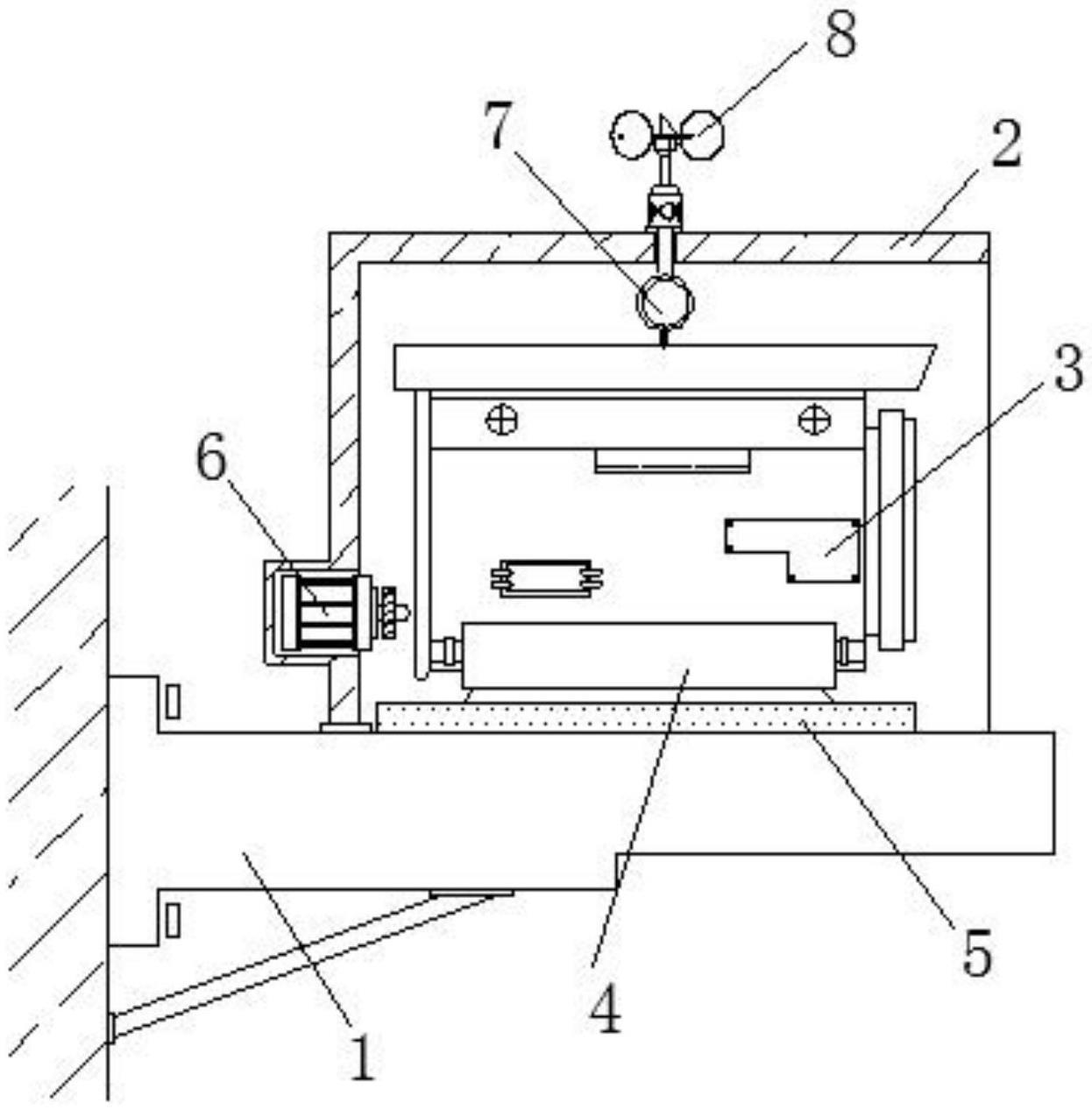
2、为实现上述目的,本实用新型提供如下技术方案:一种基于深度学习的现场高风险作业监控装置,包括支撑座,所述支撑座的顶部固定连接有固定框,所述支撑座的顶部安装有摄像头;
3、还包括:
4、活动板,设置在所述支撑座的内部,所述活动板与支撑座构成上下滑动结构,所述摄像头的底部安装有旋转云台,所述旋转云台的底部与活动板固定连接,所述摄像头的顶部固定连接有固定板;
5、所述固定框的顶部固定安装有驱鸟器,所述驱鸟器的底部固定连接有往复丝杠。
6、优选的,所述固定框的内侧顶部设置有活动杆,所述活动杆的两端均与固定框的内壁构成上下滑动结构,且活动杆的底部通过连接杆与所述固定板固定连接。
7、优选的,所述往复丝杠贯穿所述活动杆,且往复丝杠与活动杆螺纹连接。
8、通过采用以上技术方案,使得驱鸟器在转动的过程中,带动往复丝杠的旋转,进一步的使得活动杆在固定框的内侧上下移动,从而能够带动摄像头的上下移动,并且通过云台的作用,还能够带动摄像头的旋转,从而来提高摄像头的监控范围。
9、优选的,所述固定框的内部安装有电机,所述电机的右端连接有驱动轴,所述固定框的内部设置有旋转轴,所述旋转轴通过锥形齿轮与驱动轴啮合连接。
10、通过采用以上技术方案,使得电机带动驱动轴的旋转,从而通过锥形齿轮的作用,能够带动旋转轴的转动。
11、优选的,所述旋转轴远离驱动轴的一端固定连接有转动板,所述转动板的外侧壁活动轴连接有连杆,所述连杆的另一端活动轴连接有活塞板。
12、优选的,所述支撑座的顶部前后两侧均固定连接有水箱,所述活塞板与水箱的内侧壁构成左右滑动结构,且水箱的内侧壁安装有喷头,所述喷头与摄像头对应。
13、通过采用以上技术方案,旋转轴转动能够带动转动板的旋转,转动板在转动的过程中,能够使得活塞板在水箱内部的左右滑动,从而来将水箱内部的水从喷头处喷洒在摄像头的周围,来对摄像头的镜头进行喷水清洗。
14、与现有技术相比,本实用新型的有益效果是:该基于深度学习的现场高风险作业监控装置,通过固定框可以对支撑座上的摄像头进行包裹防护着,起到了对摄像头的保护效果,并且通过驱鸟器的设置,能够对鸟类进行驱赶,避免鸟类对摄像头造成损坏,适用于高风险作业的监控,其具体内容如下:
15、(1)该基于深度学习的现场高风险作业监控装置,设置有固定框可以对支撑座上的摄像头进行包裹防护着,起到了对摄像头的保护效果,并且通过驱鸟器的设置,能够对鸟类进行驱赶,避免鸟类对摄像头造成损坏,适用于高风险作业的监控;
16、(2)该基于深度学习的现场高风险作业监控装置,设置有转动板,通过电机的作用,使得锥形齿轮组的运转,从而来带动转动板的旋转,转动板在转动的过程中,能够使得活塞板在水箱内部的左右滑动,从而来将水箱内部的水从喷头处喷洒在摄像头的周围,来对摄像头的镜头进行喷水清洗。
技术特征:
1.一种基于深度学习的现场高风险作业监控装置,包括支撑座(1),所述支撑座(1)的顶部固定连接有固定框(2),所述支撑座(1)的顶部安装有摄像头(3);
2.根据权利要求1所述的一种基于深度学习的现场高风险作业监控装置,其特征在于:所述固定框(2)的内部安装有电机(6),所述电机(6)的右端连接有驱动轴,所述固定框(2)的内部设置有旋转轴(12),所述旋转轴(12)通过锥形齿轮与驱动轴啮合连接。
3.根据权利要求2所述的一种基于深度学习的现场高风险作业监控装置,其特征在于:所述旋转轴(12)远离驱动轴的一端固定连接有转动板(13),所述转动板(13)的外侧壁活动轴连接有连杆(14),所述连杆(14)的另一端活动轴连接有活塞板(16)。
4.根据权利要求3所述的一种基于深度学习的现场高风险作业监控装置,其特征在于:所述支撑座(1)的顶部前后两侧均固定连接有水箱(11),所述活塞板(16)与水箱(11)的内侧壁构成左右滑动结构,且水箱(11)的内侧壁安装有喷头(15),所述喷头(15)与摄像头(3)对应。
技术总结
本技术公开了一种基于深度学习的现场高风险作业监控装置,包括支撑座,所述支撑座的顶部固定连接有固定框,所述支撑座的顶部安装有摄像头;活动板,设置在所述支撑座的内部,所述活动板与支撑座构成上下滑动结构,所述摄像头的底部安装有旋转云台,所述旋转云台的底部与活动板固定连接,所述摄像头的顶部固定连接有固定板;所述固定框的顶部固定安装有驱鸟器,所述驱鸟器的底部固定连接有往复丝杠。该基于深度学习的现场高风险作业监控装置通过固定框可以对支撑座上的摄像头进行包裹防护着,起到了对摄像头的保护效果,并且通过驱鸟器的设置,能够对鸟类进行驱赶,避免鸟类对摄像头造成损坏。
技术研发人员:王立营,崔志建,王新波,曲宝晨,杨宝清
受保护的技术使用者:华能临沂发电有限公司
技术研发日:20230320
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!