激光雷达接收模组AA装置及双工位AA设备的制作方法
本申请涉及激光雷达接收模组组装,尤其涉及一种激光雷达接收模组aa装置及双工位aa设备。
背景技术:
1、激光雷达在自动驾驶领域广泛运用,激光雷达包括基座、发射模组和接收模组,发射模组首先与基座完成组装,完成组装的基座和发射模组组合体再与接收模组进行组装。
2、目前,激光雷达接收模组与基座发射模组组合体的组装通过人工或者半自动的方式进行,难以保证接收模组与发射模组两者之间的精确对位,影响最终产品的稳定性和一致性。
技术实现思路
1、本申请的目的在于提供一种激光雷达接收模组aa装置及双工位aa设备,该激光雷达接收模组aa装置可以实现接收模组与发射模组两者之间的精确对位,保证最终产品的稳定性和一致性。
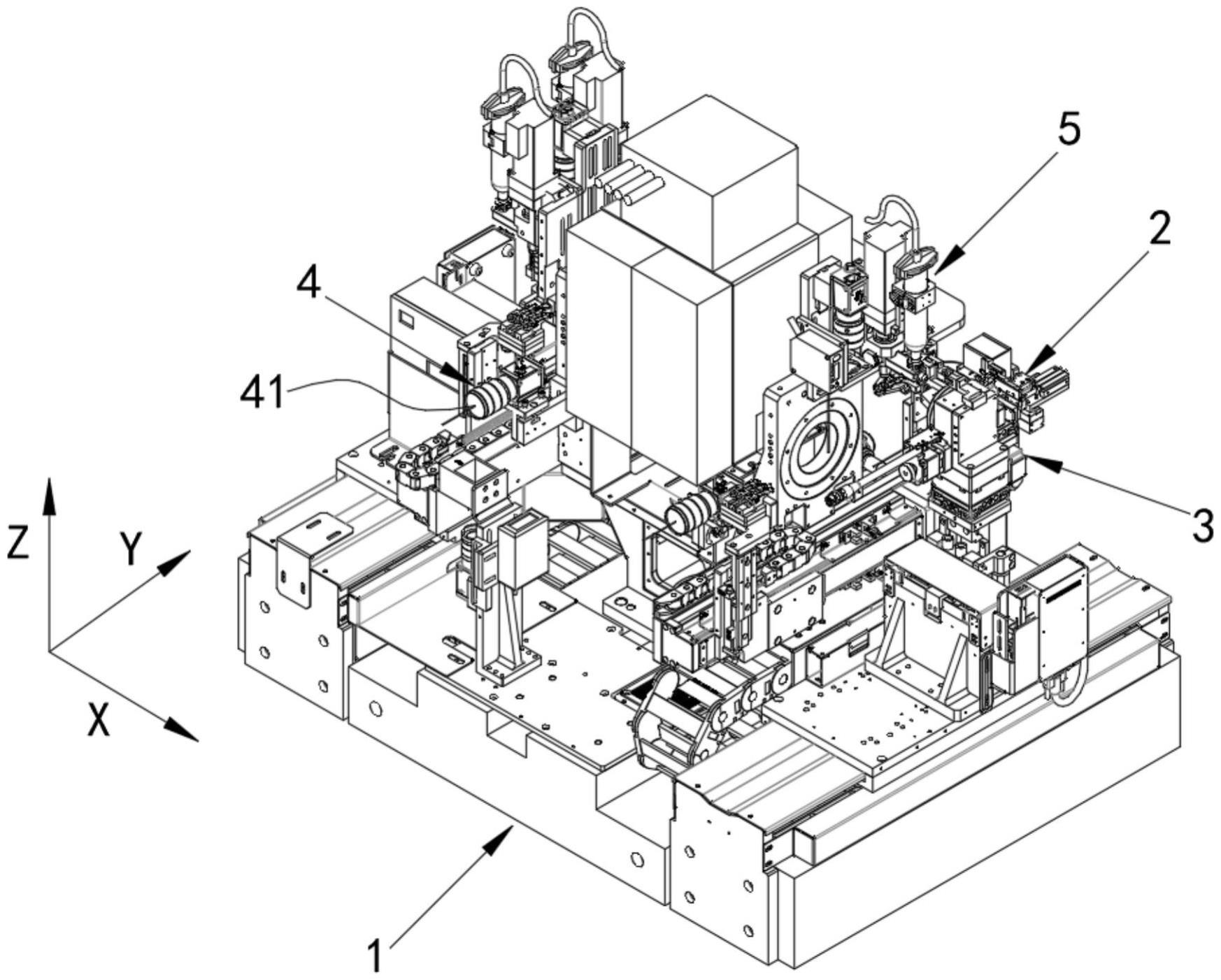
2、为此,第一方面,本申请实施例提供了一种激光雷达接收模组aa装置,用于组装基座发射模组组合体和接收模组,所述基座发射模组组合体包括基座和发射模组,所述激光雷达接收模组aa装置包括:底座;第一治具平台,设置于所述底座上,用于定位基座发射模组组合体;第二治具平台,与所述底座上的第一治具平台相对设置,所述第二治具平台包括调节机构以及设置于所述调节机构上的夹爪机构,所述夹爪机构用于抓取接收模组并与所述第一治具平台上的所述基座发射模组组合体对准;对准检测机构,包括标靶和光斑检测相机,所述标靶反射所述发射模组发出的激光至所述接收模组,所述光斑检测相机用于采集所述标靶上的光斑图像;打胶机构,用于对完成对位的基座发射模组组合体和接收模组进行打胶;以及固化机构,用于对打胶后的基座发射模组组合体和接收模组进行uv固化。
3、在一种可能的实现方式中,所述调节机构包括:第一滑动组件,可沿第一方向滑动设置;第二滑动组件,设置于所述第一滑动组件上,且可沿第二方向滑动设置;以及第三滑动组件,设置于所述第二滑动组件上,且可沿第三方向滑动设置;其中,所述第一方向、第二方向和第三方向两两垂直设置。
4、在一种可能的实现方式中,所述夹爪机构包括:第一调节座,设置于所述第三滑动组件上;旋转组件,设置于所述第一调节座上;以及夹爪组件,设置于所述旋转组件的旋转部,用于抓取所述接收模组。
5、在一种可能的实现方式中,所述夹爪机构还包括设置于所述夹爪组件上的第一点亮组件,所述第一点亮组件用于点亮所述接收模组。
6、在一种可能的实现方式中,所述第一治具平台包括:第二调节座;夹紧组件,设置于所述第二调节座上,用于夹紧所述基座发射模组组合体;第二点亮组件,设置于所述第二调节座上,用于点亮所述发射模组。
7、在一种可能的实现方式中,所述固化机构设置于所述第二调节座上。
8、第二方面,本申请实施例提供了一种双工位aa设备,包括:机架;以及如前所述的激光雷达接收模组aa装置,两个所述激光雷达接收模组aa装置镜像设置于所述机架上。
9、在一种可能的实现方式中,所述激光雷达接收模组aa装置包括第一治具平台和第二治具平台;所述双工位aa设备还包括:第一供料机构,设置于所述机架上,用于输送所述基座发射模组至所述第一治具平台或者接收所述第一治具平台处完成组装的成品;以及第二供料机构,设置于所述机架上,用于提供所述接收模组至所述第二治具平台的夹爪机构。
10、在一种可能的实现方式中,所述第一供料机构包括:第一升降弹夹,所述第一升降弹夹的内部滑动设置有用于承载所述基座发射模组组合体的第一料盘;第一推杆组件,设置于所述第一升降弹夹的一侧,用于推动所述第一料盘进出所述第一升降弹夹;以及第一上料组件,用于抓取所述第一料盘上的所述基座发射模组组合体并移送至所述第一治具平台;或者抓取所述第一治具平台上的成品至所述第一料盘。
11、在一种可能的实现方式中,所述第二供料机构包括:第二升降弹夹,所述第二升降弹夹的内部滑动设置有用于承载所述接收模组的第二料盘;第二推杆组件,设置于所述第二升降弹夹的一侧,用于推动所述第二料盘进出所述第二升降弹夹;以及第二上料组件,用于抓取所述第二料盘上的所述接收模组并移送至所述夹爪机构。
12、根据本申请实施例提供的激光雷达接收模组aa装置及双工位aa设备,该激光雷达接收模组aa装置通过第一治具平台对基座发射模组组合体进行定位,通过第二治具平台的夹爪机构抓取接收模组,并通过调节机构移动接收模组与基座发射模组组合体进行对位,发射模组发出的激光经标靶反射回接收模组,通过光斑检测相机实时采集标靶上的光斑图像,通过调节机构调整接收模组的位置,寻求最佳位置,完成基座发射模组组合体与接收模组的预aa,通过打胶机构对完成对位的基座发射模组组合体和接收模组进行打胶,通过固化机构对打胶后的基座发射模组组合体和接收模组进行uv固化,可以实现接收模组与发射模组两者之间的精确对位,保证最终产品的稳定性和一致性。
技术特征:
1.一种激光雷达接收模组aa装置,用于组装基座发射模组组合体和接收模组,所述基座发射模组组合体包括基座和发射模组,其特征在于,所述激光雷达接收模组aa装置包括:
2.根据权利要求1所述的激光雷达接收模组aa装置,其特征在于,所述调节机构(31)包括:
3.根据权利要求2所述的激光雷达接收模组aa装置,其特征在于,所述夹爪机构(32)包括:
4.根据权利要求3所述的激光雷达接收模组aa装置,其特征在于,所述夹爪机构(32)还包括设置于所述夹爪组件(323)上的第一点亮组件(324),所述第一点亮组件(324)用于点亮所述接收模组。
5.根据权利要求1所述的激光雷达接收模组aa装置,其特征在于,所述第一治具平台(2)包括:
6.根据权利要求5所述的激光雷达接收模组aa装置,其特征在于,所述固化机构(6)设置于所述第二调节座(21)上。
7.一种双工位aa设备,其特征在于,包括:
8.根据权利要求7所述的双工位aa设备,其特征在于,所述激光雷达接收模组aa装置包括第一治具平台(2)和第二治具平台(3);所述双工位aa设备还包括:
9.根据权利要求8所述的双工位aa设备,其特征在于,所述第一供料机构(8)包括:
10.根据权利要求8所述的双工位aa设备,其特征在于,所述第二供料机构(9)包括:
技术总结
本申请涉及一种激光雷达接收模组AA装置及双工位AA设备,该激光雷达接收模组AA装置用于组装基座发射模组组合体和接收模组,基座发射模组组合体包括基座和发射模组,激光雷达接收模组AA装置包括底座第一治具平台、第二治具平台、对准检测机构、打胶机构和固化机构,第一治具设置于底座上,用于定位基座发射模组组合体;第二治具平台与底座上的第一治具平台相对设置,第二治具平台包括调节机构以及设置于调节机构上的夹爪机构,夹爪机构用于抓取接收模组并与第一治具平台上的基座发射模组组合体对准;对准检测机构,包括标靶和光斑检测相机,该激光雷达接收模组AA装置可以实现接收模组与发射模组两者之间的精确对位,保证最终产品的稳定性和一致性。
技术研发人员:杨军,刘建辉,黄辉
受保护的技术使用者:深圳中科精工科技有限公司
技术研发日:20230419
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!