一种工业机器人多级升降自动拍摄装置的制作方法
本技术涉及机器人,特别是一种工业机器人多级升降自动拍摄装置。
背景技术:
1、目前,在大型公司企业银行机房等巡检工作中,还是主要以人工巡检为主要的巡检方式,而人工巡检方式往往面临着工作强度大、工作效率低、检测质量差、检测信息管理不灵活和巡检过程可能存在人身安全等缺点,随着社会的不断发展,将产生越来越多的巡检工作,巡检到位率、及时性等问题都无法保证,采用机器人代替人工进行巡检成为了历史的选择;于是巡检机器人应运而生。
2、巡检机器人使得对机房设备全天候巡检、数据采集、视频监控、温湿度测量、气压检测变得轻松容易,提高机房设备的安全运行。机房巡检机器人在使用时,通过装置在设备上的摄像机对机房进行全视角扫描监控。然而,大多现有巡检机器人在对机房设备进行监控时,摄像头的高度固定,巡检时不能全面的了解监控设备的状态,给监控造成较大困难,且一些摄像头能够进行高度调节的巡检机器人,其升降机构较为单一,升降速度较慢,影响工作效率。
3、对此,本实用新型提出一种工业机器人多级升降自动拍摄装置,予以解决。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种工业机器人多级升降自动拍摄装置,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
3、为了实现上述目的,本实用新型一方面的实施例提供一种工业机器人多级升降自动拍摄装置,包括底座,所述底座的顶部固定连接有一个升降机构,所述升降机构的一侧固定安装有云台,所述云台的内部固定安装有摄像头,所述底座的一侧固定安装有第一壳体,所述第一壳体的一侧固定安装有一个第二壳体,所述升降机构的一侧位于第二壳体的内部,所述第二壳体的内部固定安装有控制器;
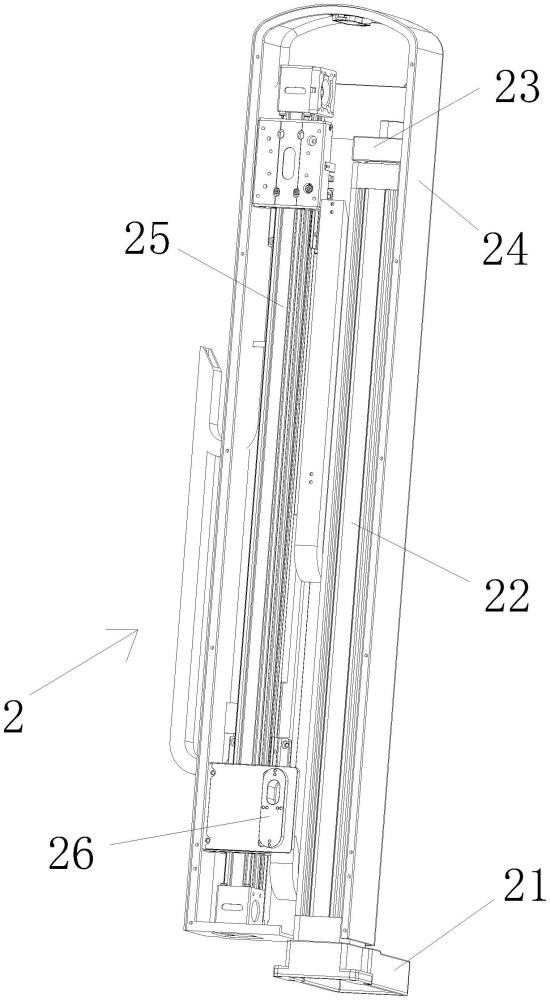
4、所述升降机构包括固定座,所述固定座的通过螺栓固定安装于底座的一侧,所述固定座的顶部固定安装有一个电动缸,所述电动缸的输出端固定连接有一个连接板,所述连接板的一侧固定连接有一个升降壳体,所述升降壳体的内部固定安装有一个直线模组,所述直线模组的输出端固定连接有一个滑块,所述升降壳体的一侧固定连接有一个挡盖。
5、由上述任一方案优选的是,所述挡盖的一侧开设有一个滑槽,所述滑槽的内部滑动连接于滑块的外表面。
6、由上述任一方案优选的是,所述云台通过螺栓固定连接于滑块的一侧。
7、采用上述方案达到的技术效果是:便于通过滑块带动云台进行升降。
8、由上述任一方案优选的是,所述电动缸位于升降壳体的内部,所述升降壳体的外部滑动连接于第二壳体的内部。
9、采用上述方案达到的技术效果是:提升装置的稳定性。
10、由上述任一方案优选的是,所述挡盖的一侧开设有若干通孔,若干所述通孔的内部均插接有固定螺栓,所述挡盖通过固定螺栓固定连接于升降壳体的一侧。
11、由上述任一方案优选的是,若干所述通孔呈对称分布。
12、采用上述方案达到的技术效果是:便于拆装,以便于后期维护。
13、与现有技术相比,本实用新型所具有的优点和有益效果为:
14、本实用新型通过直线模组的设置,能够起到一级升降的作用,通过直线模组带动滑块升降,以带动云台进行升降,进而实现摄像头的高度调节,电动缸的设置,能够起到二级升降的效果,电动缸带动连接板进行升降,进而能够带动升降壳体、直线模组进行升降,不仅能够提升装置升降的范围,还能够通过电动缸和直线模组进行同步工作,以提升调节速度,通过多级升降的设置,有效的提升了装置的工作效率,保证了装置的实用性。
15、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种工业机器人多级升降自动拍摄装置,其特征在于:包括底座(1),所述底座(1)的顶部固定连接有一个升降机构(2),所述升降机构(2)的一侧固定安装有云台(3),所述云台(3)的内部固定安装有摄像头(4),所述底座(1)的一侧固定安装有第一壳体(5),所述第一壳体(5)的一侧固定安装有一个第二壳体(6),所述升降机构(2)的一侧位于第二壳体(6)的内部,所述第二壳体(6)的内部固定安装有控制器;
2.根据权利要求1所述的一种工业机器人多级升降自动拍摄装置,其特征在于:所述挡盖(7)的一侧开设有一个滑槽(71),所述滑槽(71)的内部滑动连接于滑块(26)的外表面。
3.根据权利要求2所述的一种工业机器人多级升降自动拍摄装置,其特征在于:所述云台(3)通过螺栓固定连接于滑块(26)的一侧。
4.根据权利要求3所述的一种工业机器人多级升降自动拍摄装置,其特征在于:所述电动缸(22)位于升降壳体(24)的内部,所述升降壳体(24)的外部滑动连接于第二壳体(6)的内部。
5.根据权利要求4所述的一种工业机器人多级升降自动拍摄装置,其特征在于:所述挡盖(7)的一侧开设有若干通孔,若干所述通孔的内部均插接有固定螺栓,所述挡盖(7)通过固定螺栓固定连接于升降壳体(24)的一侧。
6.根据权利要求5所述的一种工业机器人多级升降自动拍摄装置,其特征在于:若干所述通孔呈对称分布。
技术总结
本技术涉及机器人技术领域,特别是一种工业机器人多级升降自动拍摄装置,包括底座,所述底座的顶部固定连接有一个升降机构,所述升降机构的一侧固定安装有云台,所述云台的内部固定安装有摄像头,所述底座的一侧固定安装有第一壳体,所述第一壳体的一侧固定安装有一个第二壳体,所述升降机构的一侧位于第二壳体的内部,所述第二壳体的内部固定安装有控制器。本技术的优点在于:本技术通过直线模组的设置,能够起到一级升降的作用,通过直线模组带动滑块升降,以带动云台进行升降,进而实现摄像头的高度调节,电动缸的设置,能够起到二级升降的效果,通过多级升降的设置,有效的提升了装置的工作效率,保证了装置的实用性。
技术研发人员:沈明星,田子豪,谷玉龙
受保护的技术使用者:河南超维智能科技有限公司
技术研发日:20230613
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!