一种无线潜艇式微型管道机器人的制作方法
本技术涉及一种无线潜艇式微型管道机器人,具体涉及一种通过无线充电补充电能的潜艇外形的微型管道机器人的设备和方法。
背景技术:
1、现阶段管道机器人的动力源采用的是拉线式的方式,由于受管道大小长度的影响,目前的管道机器人体积过大,难以进入市政水管等小口径的管道内,而且由于需要有线充电所以线体的拖拽是一大难题,其结果是影响了微型管道检测和维护作业的效率。
技术实现思路
1、本实用新型涉及一种无线潜艇式微型管道机器人,目的是解决现有管道机器人体积过大,难以进入微型管道内部检测的问题。
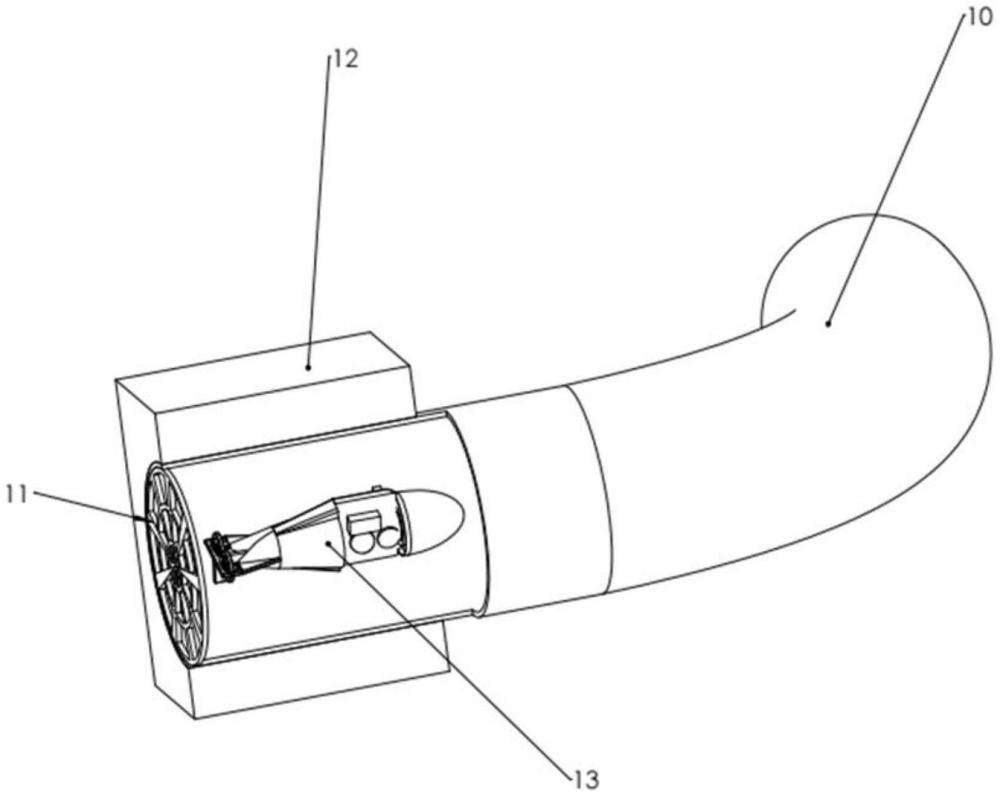
2、为实现上述目的,本实用新型采用以下技术方案:根据本实用新型的一个方案,提供一种无线潜艇式微型管道机器人,包括管道和微型机器人,所述管道外固定设置有无线充电站,所述管道中设有拦截网,所述拦截网与所述无线充电站处于管道的相同区域用于拦截所述微型机器人并在此处利用无线充电站充电,所述的微型机器人前端设有微型摄像装置。
3、进一步的,所述的无线充电站位于管道的最下游的区域。
4、进一步的,所述的潜艇式微型机器人后端设有螺旋桨用于控制微型机器人的移动和变向。
5、进一步的,所述的微型机器人上装有微型流速传感器用来检测微型机器人所在位置的水流速度。
6、进一步的,所述的微型机器人上装有微型水压传感器用来检测微型机器人所在位置的水压大小。
7、进一步的,所述的微型机器人内部设有无线充电接收装置用来接收所述无线充电站的电能,完成机器人电能的补充。
8、进一步的,所述的微型机器人内部设有无线控制装置用于控制微型机器人的运动。
9、进一步的,所述的微型机器人内部设有信息传输装置用于将微型摄像装置拍摄到的画面通过数据记录存储设备存储。
10、进一步的,所述的微型摄像装置外设有透明罩用于隔离水来保护所述的微型摄像装置并且不影响拍摄罩外的管道。
11、与现有技术相比,本实用新型的优点和创新之处在于:
12、1、本实用新型中机器人可实现迷你的外形能够进入管径更加狭窄的地方,进而实现机器人微型管道的巡检作业。
13、2、无线充电装置能够将机器人做的无线化运行,避免机器人像常规的管道机器人一样拖着长长的线体,工作极度不方便。
技术特征:
1.一种无线潜艇式微型管道机器人,其特征在于,包括管道(10)和微型机器人(13),所述管道(10)外固定设置有无线充电站(12),所述管道(10)中设有拦截网(11),所述拦截网(11)与所述无线充电站(12)处于管道(10)的相同区域用于拦截所述微型机器人(13)并在此处利用无线充电站(12)充电,所述的微型机器人(13)前端设有微型摄像装置(14)。
2.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的无线充电站(12)位于管道(10)的最下游的区域。
3.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型机器人(13)后端设有螺旋桨(17)用于控制微型机器人(13)的移动和变向。
4.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型机器人(13)上装有微型流速传感器(15)用来检测微型机器人(13)所在位置的水流速度。
5.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型机器人(13)上装有微型水压传感器(16)用来检测微型机器人(13)所在位置的水压大小。
6.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型机器人(13)内部设有无线充电接收装置(19)用来接收所述无线充电站(12)的电能,完成机器人(13)电能的补充。
7.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型机器人(13)内部设有无线控制装置(18)用于控制微型机器人的运动。
8.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型机器人(13)内部设有数据记录存储设备(20)用于将微型摄像装置拍摄到的画面存储便于人员查看。
9.根据权利要求1所述的一种无线潜艇式微型管道机器人,其特征在于,所述的微型摄像装置(14)外设有透明罩用于隔离水来保护所述的微型摄像装置(14)并且不影响拍摄罩外的管道。
技术总结
本技术公开了一种无线潜艇式微型管道机器人,包括管道和微型机器人,所述管道外固定设置有无线充电站,所述管道中设有拦截网,所述拦截网与所述无线充电站处于管道的相同区域用于拦截所述微型机器人并在此处利用无线充电站充电,与现有技术相比,本技术的一种无线潜艇式微型管道机器人不仅可实现迷你的外形能够进入管径更加狭窄的地方,进而实现机器人微型管道的巡检作业,而且无线充电装置能够将机器人做的无线化运行,避免机器人像常规的管道机器人一样拖着长长的线缆。
技术研发人员:孙文,刘志斌,姚才阳
受保护的技术使用者:浙江钱塘机器人及智能装备研究有限公司
技术研发日:20230724
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!