一种用于管道内检测的爬行机器人及其工作方法与流程
本发明属于自动无损检测,具体涉及一种用于管道内检测的爬行机器人及其工作方法。
背景技术:
1、目前在役火电压力管道焊缝的无损检测大多需要搭架子、开挖、拆除保温层等前期大量准备工作,耗时耗力、风险高,部分埋地铺设管道由于穿越河流等环境限制无法开挖进行无损检测,人工检测受到了很大的限制,给生产运行带来巨大安全隐患,严重影响安全经济运行。因此,有必要采用自动无损检测技术对管道内部进行远程检测,在免搭架子、开挖、拆保温层的情况下对管道焊缝进行无损检测。
2、火电压力管道内壁为曲面且弯头较多,机器人在管道内部爬行时不仅要进行周向和轴向曲面运动,还要通过近乎90度的弯角。常规的管道内检测机器人无法在携带检测设备情况下完成在狭小空间内的过弯和转向,难以实现狭小空间内管道内壁焊缝的自动无损检测功能。
技术实现思路
1、为了解决上述现有问题,本发明的目的在于提供一种用于管道内检测的爬行机器人及其工作方法,检测效率高、检测功能齐全,能够使爬行机器人在狭小空间内完成过弯和转向,到达人力不可达的位置进行检测,具有广泛的适用性。
2、本发明通过以下技术方案来实现:
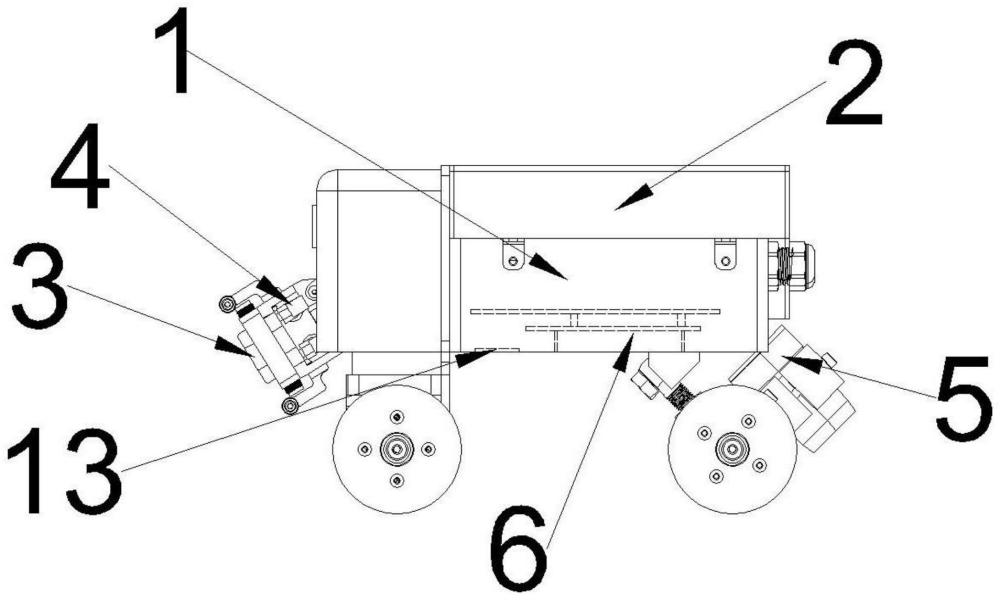
3、本发明公开的一种用于管道内检测的爬行机器人,包括本体,本体内部设有驱动电机、陀螺仪、气缸和控制单元;本体下部设置有一对前驱动轮和一对后从动轮,前驱动轮和后从动轮均为永磁轮;一对前驱动轮分别通过传动轴和差速机构与驱动电机连接;气缸通过相控阵探头支架连接有相控阵检测探头;本体上设有电磁测厚探头和图像采集装置;相控阵检测探头、电磁测厚探头、图像采集装置、驱动电机、陀螺仪和气缸分别与控制单元连接。
4、优选地,前驱动轮的磁性大于后从动轮。
5、优选地,所述差速机构包括第二锥齿轮和一对第一锥齿轮,一对第一锥齿轮分别与前驱动轮和传动轴固定连接并相对设置,第二锥齿轮分别与一对第一锥齿轮啮合;第二锥齿轮通过传动轴与驱动电机连接。
6、优选地,相控阵探头支架包括连接架和连接铰片;连接架的一端与气缸连接,并通过若干连接铰片与本体连接;连接架通过若干第二连接螺栓固定相控阵检测探头。
7、进一步优选地,连接架连接有若干凹型支撑架,凹型支撑架通过第三连接螺栓连接有若干导轮,若干导轮分布在相控阵检测探头周围。
8、优选地,一对后从动轮通过后从动轮轴连接,所述后从动轮轴外部穿套有方形连杆,方形连杆内设有若干轴承,所述后从动轮轴与若干轴承连接;方形连杆连接有活节螺栓,活节螺栓的孔眼通过第一连接螺栓与本体连接;方形连杆上设有电磁测厚探头支架,电磁测厚探头可拆卸地与电磁测厚探头支架连接。
9、优选地,本体上还设置有照明装置和耦合剂喷施机构,耦合剂喷施机构与外部的耦合剂输送系统连接,照明装置和耦合剂喷施机构分别连接至控制单元。
10、优选地,本体内部设有电磁测厚板卡,电磁测厚板卡与电磁测厚探头连接;本体通过若干挂耳连接有相控阵板卡,相控阵板卡与相控阵检测探头连接,相控阵板卡的接口经防水处理。
11、优选地,图像采集装置为高清摄像头,驱动电机为伺服电机。
12、本发明公开的上述用于管道内检测的爬行机器人的工作方法,包括
13、控制单元连接至上位机,爬行机器人进入待检管道,驱动电机驱动前驱动轮转动并带动后从动轮转动,沿管道行驶;气缸通过相控阵探头支架将相控阵检测探头提离管道内壁;通过陀螺仪实时检测爬行机器人的姿态和位置;利用图像采集装置和照明装置行进至环焊缝部位,控制气缸带动相控阵探头支架调整相控阵检测探头与管道内壁的距离;爬行机器人沿环焊缝周向行驶一圈,利用电磁测厚探头进行管道壁厚检测,利用图像采集装置进行宏观检测,利用相控阵检测探头进行相控阵检测;检测信号经控制单元传输至上位机,并接受来自上位机的控制指令。
14、与现有技术相比,本发明具有以下有益的技术效果:
15、本发明公开的一种用于管道内检测的爬行机器人,利用一对前驱动轮和一对后从动轮作为行进工具,永磁轮能够使爬行机器人实现沿管道环焊缝的周向运动;同时,一对前驱动轮通过差速机构传动,能够使爬行机器人在狭小空间内完成过弯和转向,提高爬行机器人的操控稳定性。相控阵探头支架采用气缸控制伸收,使得相控阵探头支架伸出后在气压作用下具有一定的自适应力,避免探头受力太大损坏探头,同时又能保证探头和管道曲面的贴合度。机器人上设置有陀螺仪,陀螺仪模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,姿态测量精度0.05度,稳定性较高,可以实时检测机器人在管道内部的姿态和位置。爬行机器人集成了电磁测厚探头、图像采集装置和相控阵检测探头,能够同时完成管道焊缝的壁厚检测、宏观检测和相控阵检测,检测效率高、检测功能齐全,能够通过管道内壁到达人力不可达的位置进行检测,具有广泛的适用性。
16、进一步地,前驱动轮的磁性大于后从动轮,既保证了机器人在进行周向运动时有足够的吸附力不会从上方掉落,又能避免从动轮磁力太大而产生较大的吸附力导致机器人无法完成在管道内的转弯动作。
17、进一步地,控阵探头支架的连接架分别与气缸和本体连接,可以确保气缸将相控阵探头伸出时,探头支架在连接铰片的作用下不会发生角度转动,与焊缝角度保持平行。同时若干连接铰片的组合式设计既保证了相控阵探头的伸出长度,又不会在收回相控阵探头时因连接片过长而卡阻相控阵探头。通过若干第二连接螺栓固定相控阵检测探头,能够方便对相控阵探头的伸出长度进行调节。
18、更进一步地,相控阵探头周围分布的若干导轮,在相控阵探头进行检测时,既能保证相控阵检测过程中探头楔块与管道表面耦合良好,又能辅助探头楔块在管道内壁表面顺滑移动,提高检测效率和检测准确度。
19、进一步地,方形连杆连接有活节螺栓,活节螺栓的孔眼通过第一连接螺栓与本体连接,能够随时调节电磁探头与管壁之间的距离。
20、进一步地,照明装置能够在管道内部黑暗空间中提供稳定光源,方便观察管道内部情况;耦合剂喷施机构能够在检测的同时喷施耦合剂,提高检测效率。
21、本发明公开的上述用于管道内检测的爬行机器人的工作方法,操作简便、检测效率高、检测功能齐全,能够使爬行机器人在狭小空间内完成过弯和转向,到达人力不可达的位置进行检测,具有良好的应用前景。
技术特征:
1.一种用于管道内检测的爬行机器人,包括本体(1),其特征在于,本体(1)内部设有驱动电机(12)、陀螺仪(13)、气缸(20)和控制单元;本体(1)下部设置有一对前驱动轮(9)和一对后从动轮(10),前驱动轮(9)和后从动轮(10)均为永磁轮;一对前驱动轮(9)分别通过传动轴(14)和差速机构与驱动电机(12)连接;气缸(20)通过相控阵探头支架(4)连接有相控阵检测探头(3);本体(1)上设有电磁测厚探头(5)和图像采集装置(7);相控阵检测探头(3)、电磁测厚探头(5)、图像采集装置(7)、驱动电机(12)、陀螺仪(13)和气缸(20)分别与控制单元连接。
2.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,前驱动轮(9)的磁性大于后从动轮(10)。
3.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,所述差速机构包括第二锥齿轮(16)和一对第一锥齿轮(15),一对第一锥齿轮(15)分别与前驱动轮(9)和传动轴(14)固定连接并相对设置,第二锥齿轮(16)分别与一对第一锥齿轮(15)啮合;第二锥齿轮(16)通过传动轴与驱动电机(12)连接。
4.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,相控阵探头支架(4)包括连接架(41)和连接铰片(44);连接架(41)的一端与气缸(20)连接,并通过若干连接铰片(44)与本体(1)连接;连接架(41)通过若干第二连接螺栓(22)固定相控阵检测探头(3)。
5.根据权利要求4所述的用于管道内检测的爬行机器人,其特征在于,连接架(41)连接有若干凹型支撑架(43),凹型支撑架(43)通过第三连接螺栓(45)连接有若干导轮(42),若干导轮(42)分布在相控阵检测探头(3)周围。
6.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,一对后从动轮(10)通过后从动轮轴连接,所述后从动轮轴外部穿套有方形连杆(17),方形连杆(17)内设有若干轴承,所述后从动轮轴与若干轴承连接;方形连杆(17)连接有活节螺栓(18),活节螺栓(18)的孔眼通过第一连接螺栓(11)与本体(1)连接;方形连杆(17)上设有电磁测厚探头支架,电磁测厚探头(5)可拆卸地与电磁测厚探头支架连接。
7.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,本体(1)上还设置有照明装置(8)和耦合剂喷施机构,耦合剂喷施机构与外部的耦合剂输送系统连接,照明装置(8)和耦合剂喷施机构分别连接至控制单元。
8.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,本体(1)内部设有电磁测厚板卡(6),电磁测厚板卡(6)与电磁测厚探头(5)连接;本体(1)通过若干挂耳(21)连接有相控阵板卡(2),相控阵板卡(2)与相控阵检测探头(3)连接,相控阵板卡(2)的接口经防水处理。
9.根据权利要求1所述的用于管道内检测的爬行机器人,其特征在于,图像采集装置(7)为高清摄像头,驱动电机(12)为伺服电机。
10.权利要求1~9所述的用于管道内检测的爬行机器人的工作方法,其特征在于,包括:
技术总结
本发明公开的一种用于管道内检测的爬行机器人及其工作方法,属于自动无损检测技术领域。本体内部设有驱动电机、陀螺仪、气缸和控制单元;本体下部设置有一对前驱动轮和一对后从动轮,前驱动轮和后从动轮均为永磁轮;一对前驱动轮分别通过传动轴和差速机构与驱动电机连接;气缸通过相控阵探头支架连接有相控阵检测探头;本体上设有电磁测厚探头和图像采集装置;相控阵检测探头、电磁测厚探头、图像采集装置、驱动电机、陀螺仪和气缸分别与控制单元连接。本发明的操作简便、检测效率高、检测功能齐全,能够使爬行机器人在狭小空间内完成过弯和转向,到达人力不可达的位置进行检测,具有良好的应用前景。
技术研发人员:李巍,李太江,李生文,王博,娄正计,陈盛广,孙琦,许博炜,程晔锋,李聚涛,杨强斌,刘思静,王奇
受保护的技术使用者:西安热工研究院有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!