一种步履式行走装置用机架支腿及调节方法与流程
本发明涉及光伏组件安装设备,具体涉及一种步履式行走装置用机架支腿及调节方法。
背景技术:
1、随着我国光伏时代来临,光伏产业进入新的发展阶段,将面临着更高的要求和挑战。受益于光伏产业链成本的持续下降,我国光伏度电成本与火电度电成本价差持续收窄,光伏发电具有巨大的发展潜力。
2、就光伏组件的安装来说,目前的安装方式均为人工安装,在一些中大型的分布式光伏发电系统以及集中式光伏发电系统条件下仍采用人工安装,那安装的效率必然低下,且会耗费大量的时间和成本,同时长时间在露天环境下工作对工人的要求也会相应提高。
3、因此,智能化安装设备以成为光伏组件安装的趋势。步履式行走装置为智能化安装设备转给你的行走移动机构,包括机架、导梁以及机架、导梁对应的支腿。光伏组件智能安装设备需架设立桩上,立桩理想状态下是间距分布均匀呈直线排列,前后各一排,但由于建造误差,立桩的位置间距存在偏差,所以需要在光伏组件智能安装设备上安装可调支腿,其通过支腿站立在立桩上,便可将其架设在桩上且帮助设备在桩上行走。
技术实现思路
1、本发明的目的在于提供一种步履式行走装置用机架支腿及调节方法,用于支撑步履式行走装置的机架,能够对机架支腿的位置进行微调,使机架支腿准确落在立桩上,以适应立桩的位置间距偏差。
2、本发明通过下述技术方案实现:
3、一种步履式行走装置用机架支腿,包括接触底板、机架连接件、竖直伸缩件、第一水平伸缩件和第二水平伸缩件;
4、所述接触底板用于放置在立桩上;
5、所述第一水平伸缩件设置在接触底板上端面,用于调节机架支腿的x向位移;
6、所述竖直伸缩件用于调节接触底板的竖直位移,实现支腿的抬升与下落;
7、所述第二水平伸缩件设置在机架连接件底部,用于调机架支腿的y向位移;
8、所述机架连接件包括底板和顶板,所述底板和顶板之间通过立板连接,所述底板与竖直伸缩件滑动连接,所述顶板用于与机架连接,且所述底板和顶板间能穿过导梁;所述底板和顶板分别设置用于穿过竖直伸缩件的第一通孔和第二通孔,所述第一通孔和第二通孔的内径均大于竖直伸缩件的外径。
9、本发明所述x向和y分别指机架的长度方向和宽度方向或x向和y分别指机架的宽度方向和长度方向,其中,机架的长度方向即为步履式行走装置的移动方向。
10、由于步履式行走装置包括了机架和导梁,机架在驱动机构驱动下能在导梁上移动,因此,本发明用于支撑机架的机架支腿除了能够实现对机架的支撑之外,还需要能够通过导梁,因此,本发明合理设计了所述的机架连接件,所述的机架连接件并不是一个简单的平板结构,而且箱式结构,箱式结构的顶部用于与机架连接,箱式结构的中部空腔可通过导梁,实现了既能支撑机架,又能允许导梁穿过。
11、本发明所述第一水平伸缩件用于调节竖直伸缩件的x向位移,即能用于调节支腿的x向位移,以适应同一排中相邻两个立桩之间的桩间距误差;所述第二水平伸缩件用于调节支腿的y向位移,以适应同一行两个桩之间的立桩间距误差;所述竖直伸缩件能实现接触底板竖向位移的调节,实现支腿的抬升与下落。
12、因此,本发明所述机架支腿能够根据桩间距、水平度、高度上等误差对机架支腿的位置进行微调,以保证机架支腿能准确稳定地落在立桩上。
13、进一步地,第二水平伸缩件的结构包括丝杠传动机构、液压缸或气缸;所述第一水平伸缩件的结构包括丝杠传动机构、液压缸或气缸。
14、进一步地,竖直伸缩件采用丝杠传动机构,所述竖直伸缩件包括竖直丝杠和设置在竖直丝杠上的套筒,所述套筒外壁设置有滑动块,所述滑动块滑动设置在底板的底部,所述滑动块与第二水平伸缩件的伸缩端端部连接。
15、即本发明的机架支腿上下移动采用丝杠传动,具有自锁功能,能实现长时间支撑上部的结构纹丝不动,具有较大的承载能力
16、进一步地,底板的下端面设置有第二滑槽,所述滑动块在第二水平伸缩件的驱动下在第二滑槽内相对机架连接件进行y向位移。
17、进一步地,顶板上端面在机架连接件水平移动方向的两侧均至少设置有两个压紧块;所述压紧块和顶板之间具有能够容纳机架下边缘的间距。
18、进一步地,机架下边缘通过螺栓紧固在压紧块和顶板之间。
19、进一步地,立板的外壁上设置有加强筋。
20、进一步地,接触底板上连接有限位趾;
21、所述限位趾具有连接部和限位部;所述连接部用于与接触底板连接,所述限位部设置有两个,两个限位部置于立桩的两侧。
22、进一步地,竖直伸缩件的底部通过球铰连接有底座,所述底座由第一水平伸缩件驱动进行x向位移。
23、基于上述步履式行走装置用机架支腿的移动方法,包括以下步骤:
24、s1、当需要移动机架时,由控制系统控制竖直伸缩件向上移动进行抬升,直到接触底板(1)的高度高于立桩顶部圆面上的耳板;
25、s2、由控制系统控制移动控制机构使机架移动,当移动到指定位置时,由控制系统控制竖直伸缩件向下移动进行下落,使接触底板落在立桩顶部圆面上耳板一侧;
26、s3、由控制系统调节第一水平伸缩件和/或第二水平伸缩件,使机架支腿在x向、y向进行微调,实现机架支腿平稳放置在立桩顶部圆面上。
27、本发明与现有技术相比,具有如下的优点和有益效果:
28、1、本发明所述机架支腿中的第一水平伸缩件、第二水平伸缩件和竖直伸缩件能够分别对机架支腿的x向位移、y向位移和接触挡板的竖直高度进行调节,通过接触挡板的竖直位移实现机架支腿的抬升和落下,实现了机架的移动需要和机架支腿对机架的支撑作用,x向位移、y向位移,以及球铰连接方式能够对机架的位置进行微调,以弥补立桩的位置间距(由于土建施工时不可避免存在桩间距、水平度、高度上等误差)偏差。
29、2、本发明通过在接触底板上连接有限位趾,当机架支腿落在立桩上时,限位趾两侧的限位部与立桩两侧的外壁接触,提高了机架支腿放置在立桩上的稳定性。
技术特征:
1.一种步履式行走装置用机架支腿,其特征在于,包括接触底板(1)、机架连接件(5)、竖直伸缩件(6)、第一水平伸缩件(7)和第二水平伸缩件(8);
2.根据权利要求3所述的一种步履式行走装置用机架支腿,其特征在于,所述第二水平伸缩件(8)的结构包括丝杠传动机构、液压缸或气缸;所述第一水平伸缩件(7)的结构包括丝杠传动机构、液压缸或气缸。
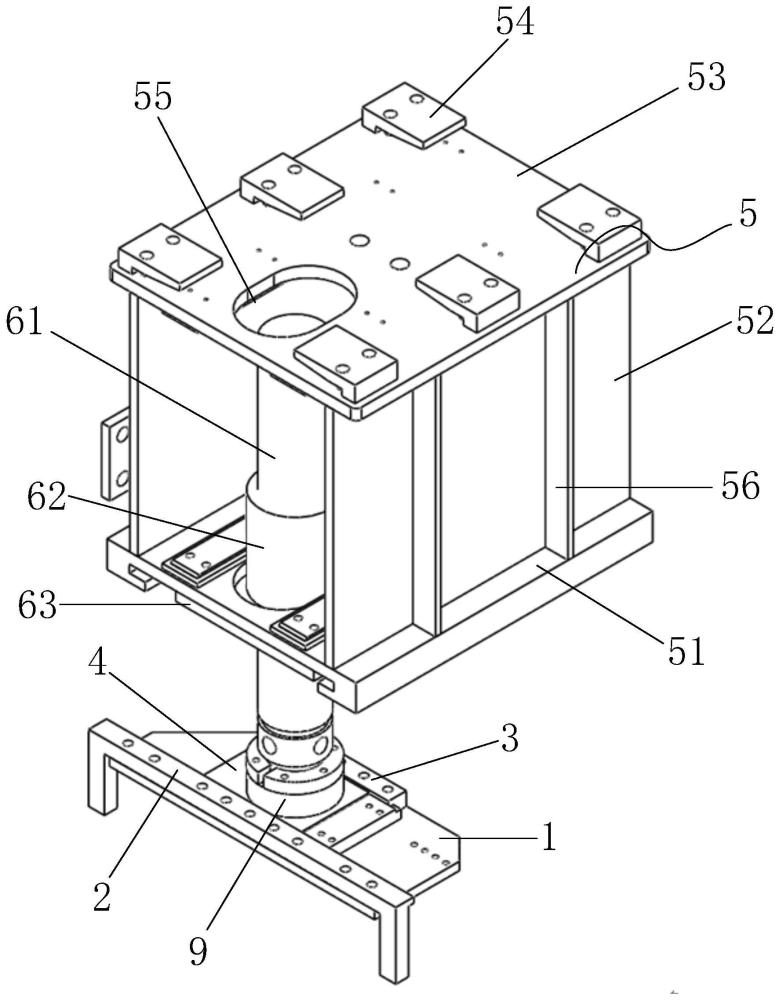
3.根据权利要求2所述的一种步履式行走装置用机架支腿,其特征在于,所述竖直伸缩件(6)采用丝杠传动机构,所述竖直伸缩件(6)包括竖直丝杠(61)和设置在竖直丝杠上的套筒(62),所述套筒(62)外壁设置有滑动块(63),所述滑动块(63)滑动设置在底板(51)的底部,所述滑动块(63)与第二水平伸缩件(8)的伸缩端端部连接。
4.根据权利要求3所述的一种步履式行走装置用机架支腿,其特征在于,所述底板(51)的下端面设置有第二滑槽,所述滑动块(63)在第二水平伸缩件(8)的驱动下在第二滑槽内相对机架连接件(5)进行y向位移。
5.根据权利要求1所述的一种步履式行走装置用机架支腿,其特征在于,所述顶板(53)上端面在机架连接件(5)水平移动方向的两侧均至少设置有两个压紧块(54);所述压紧块(54)和顶板(53)之间具有能够容纳机架下边缘的间距。
6.根据权利要求5所述的一种步履式行走装置用机架支腿,其特征在于,所述机架下边缘通过螺栓紧固在压紧块(54)和顶板(53)之间。
7.根据权利要求1所述的一种步履式行走装置用机架支腿,其特征在于,所述立板(52)的外壁上设置有加强筋(56)。
8.根据权利要求1所述的一种步履式行走装置用机架支腿,其特征在于,所述接触底板(1)上连接有限位趾(2);
9.根据权利要求8所述的一种步履式行走装置用机架支腿,其特征在于,所述竖直伸缩件(6)的底部通过球铰(9)连接有底座(4),所述底座(4)由第一水平伸缩件(7)驱动进行x向位移。
10.基于权利要求1-9任一项所述的一种步履式行走装置用机架支腿的移动方法,其特征在于,包括以下步骤:
技术总结
本发明涉及光伏组件安装设备技术领域,具体公开了一种步履式行走装置用机架支腿及调节方法,包括接触底板、机架连接件、竖直伸缩件、第一水平伸缩件和第二水平伸缩件;第一水平伸缩件设置在接触底板上端面,用于调节机架支腿的X向位移;所述竖直伸缩件的下端与接触底板连接,用于实现接触底板抬升与下落,第二水平伸缩件用于调节机架支腿的Y向位移;机架连接件的底板与第二水平伸缩件滑动连接,机架连接件的顶板用于与机架连接,且所述底板和顶板之间能穿过导梁。本发明用于支撑步履式行走装置的机架,能够对机架支腿的位置进行微调,使机架支腿准确落在立桩上,以适应立桩的位置间距偏差。
技术研发人员:吴小平,李博,黄松和,廖然,李跃,翁晓军,吴晓,刘坤
受保护的技术使用者:通威新能源有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!