固体流体组合精密驱动装置及方法
本发明涉及精密微操作领域,具体地,涉及一种固体流体组合精密驱动装置及方法,尤其涉及一种固体进出流体腔室引起所包络流体和固体总体积变化而产生精密驱动的装置及方法。
背景技术:
1、随着微精密技术的迅速发展,航空航天领域、医疗领域、生命科学等领域,对精密线性位移驱动的精度、速度、稳定性、驱动力和行程提出了越来越高的要求,其定位精度直接影响到生产加工的精度。
2、当前,精密线性位移驱动大多通过智能材料技术解决,例如通过压电材料驱动技术实现电能向机械能的转换,能够实现精密驱动的要求。但传统的机械驱动方式,直线驱动器受其工作原理和机械结构限制,无法满足超精密和高精度位移驱动的要求,如何通过机械驱动的方式解决精密驱动的问题是本领域的技术难题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种固体流体组合精密驱动装置及方法,具体为一种固体进出流体腔室引起所包络流体和固体总体积变化而产生精密驱动的装置及方法。
2、根据本发明提供的一种固体流体组合精密驱动装置,包括流体腔室、固体驱动件以及随动体,驱使所述固体驱动件的部分或全部进出所述流体腔室能够引起流体腔室体积变化使得流体腔室中的流体驱使所述随动体产生平动或转动,所述流体为不可压缩流体。
3、根据本发明提供的一种固体流体组合精密驱动方法,通过驱使所述固体驱动件的部分或全部进出所述流体腔室引起流体腔室体积变化使得流体腔室中的流体驱使所述随动体产生平动或转动,所述流体为不可压缩流体。
4、优选地,平动随动体的横截面积或转动随动体的转动面的面积小于、等于或大于固体驱动件的横截面积。
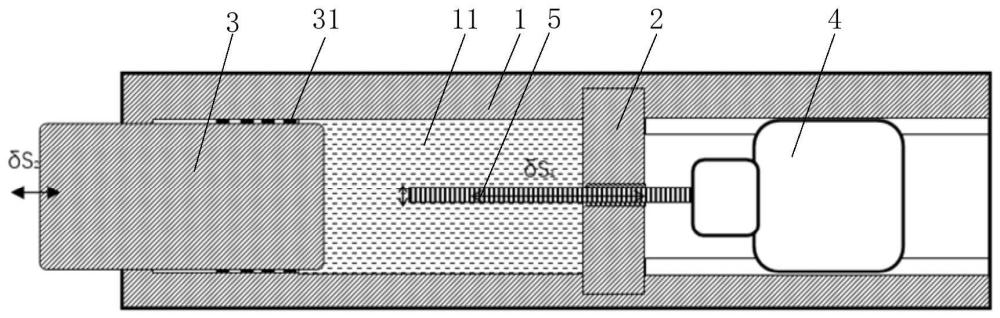
5、优选地,包括:驱动壳体、布置在所述驱动壳体上的封闭端、布置在所述驱动壳体输出端上的随动体以及与所述固体驱动件的一端驱动相连的动力机构;
6、所述驱动壳体、封闭端、随动体三者围成所述流体腔室,所述动力机构布置在所述流体腔室的外部,所述固体驱动件的另一端穿过封闭端延伸到所述流体腔室的内部,当所述动力机构运行时能够驱使所述固体驱动件的另一端朝向或背向所述流体腔室的方向运动进而能够引起所述流体腔室内含物总体积的改变从而驱使所述随动体运动。
7、优选地,所述固体驱动件与封闭端之间能够采用如下任一种配合形式:
8、固体驱动件为表面设置有外螺纹的圆柱体结构,所述封闭端的中部为具有匹配所述外螺纹的刚性内螺纹孔;
9、固体驱动件为表面设置有外螺纹的圆柱体结构,所述封闭端的中部为具有匹配所述外螺纹的柔性内螺纹孔且所述外螺纹与内螺纹孔之间过盈配合;
10、固体驱动件为表面设置有外螺纹的圆柱体结构,所述封闭端的中部为柔性结构体;
11、所述固体驱动件包括传动件以及依次布置在所述传动件上的多个填充体,所述传动件贯穿所述流体腔室且两端均延伸到所述流体腔室的外部,所述封闭端的中部为具有通孔的柔性结构体;
12、所述固体驱动件为圆柱体的光滑结构,所述封闭端的中部为具有通孔的柔性结构体,所述驱动壳体与动力机构之间驱动连接,当动力机构运行时能够沿驱动壳体的内壁运动进而驱使所述固体驱动件沿轴向方向运动。
13、优选地,所述动力机构布置在所述驱动壳体的内部并与所述驱动壳体的内壁滑动配合。
14、优选地,所述动力机构上设置有位移传感器,所述位移传感器用于采集所述动力机构的运动位移,进而使得所述动力机构能够停止在目标位置。
15、优选地,所述固体驱动件的数量为多个,每个所述固体驱动件均连接有动力机构且多个固体驱动件的运动相互之间不干涉。
16、优选地,所述随动体的数量为一个或多个,多个所述随动体形状全部相同、部分相同或均不相同,其中,所述随动体能够以不同夹角的姿态被配置在所述驱动壳体上。
17、优选地,所述随动体与所述驱动壳体之间设置有弹簧;和/或
18、所述随动体上设置有防止自身脱离所述驱动壳体的限位结构。
19、与现有技术相比,本发明具有如下的有益效果:
20、本发明通过在壳体内设计一个流体腔室并通过固定伸入到流体腔室中的方式,进而使得流体成为驱动随动体运动的驱动力,通过将固体的外径设计为小于随动体外径的方式满足超精密和高精度位移驱动的要求,实现了通过机械驱动的方式解决了精密驱动的问题,结构简单,操作便捷,易于实现。
技术特征:
1.一种固体流体组合精密驱动装置,其特征在于,包括流体腔室(11)、固体驱动件(5)以及随动体(3),驱使所述固体驱动件(5)的部分或全部进出所述流体腔室(11)能够引起流体腔室(11)体积变化使得流体腔室(11)中的流体驱使所述随动体(3)产生平动和/或转动,所述流体为不可压缩流体。
2.一种固体流体组合精密驱动方法,其特征在于,通过驱使所述固体驱动件(5)的部分或全部进出所述流体腔室(11)引起流体腔室(11)体积变化使得流体腔室(11)中的流体驱使所述随动体(3)产生平动和/或转动,所述流体为不可压缩流体。
3.根据权利要求1所述的装置或权利要求2所述的方法,其特征在于,所述平动随动体(3)的横截面积或转动随动体(3)的转动面积大于、等于或小于固体驱动件(5)的横截面积。
4.根据权利要求1所述的装置或权利要求2所述的方法,其特征在于,包括:驱动壳体(1)、布置在所述驱动壳体(1)上的封闭端(2)、布置在所述驱动壳体(1)输出端上的随动体(3)以及与所述固体驱动件(5)的一端驱动相连的动力机构(4);
5.根据权利要求4所述的装置或方法,其特征在于,所述固体驱动件(5)与封闭端(2)之间能够采用如下任一种配合形式:
6.根据权利要求5所述的装置或方法,其特征在于,所述动力机构(4)布置在所述驱动壳体(1)的内部并与所述驱动壳体(1)的内壁滑动配合。
7.根据权利要求5所述的装置或方法,其特征在于,所述动力机构(4)上设置有位移传感器,所述位移传感器用于采集所述动力机构(4)的运动位移,进而使得所述动力机构(4)能够停止在目标位置。
8.根据权利要求4所述的装置或方法,其特征在于,所述固体驱动件(5)的数量为多个,每个所述固体驱动件(5)均连接有动力机构(4)且多个固体驱动件(5)的运动相互之间不干涉。
9.根据权利要求4所述的装置或方法,其特征在于,所述随动体(3)的数量为一个或多个,多个所述随动体(3)形状全部相同、部分相同或均不相同,其中,所述随动体(3)能够以不同夹角的姿态被配置在所述驱动壳体(1)上。
10.根据权利要求4所述的装置或方法,其特征在于,所述随动体(3)与所述驱动壳体(1)之间设置有弹簧(6);和/或
技术总结
本发明涉及精密微操作领域,提供了一种固体流体组合精密驱动装置及方法,包括流体腔室、固体驱动件以及随动体,驱使所述固体驱动件的部分或全部进出所述流体腔室能够引起流体腔室体积变化使得流体腔室中的流体驱使所述随动体产生平动或转动。本发明通过在壳体内设计一个流体腔室并通过固定伸入到流体腔室中的方式,进而使得流体成为驱动随动体运动的驱动力,通过将固体的外径设计为小于随动体外径的方式满足超精密和高精度位移驱动的要求,实现了通过机械驱动的方式解决了精密驱动的问题,结构简单,操作便捷,易于实现。
技术研发人员:杨斌堂
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!