一种车辆换挡控制方法、装置、设备及存储介质与流程
本技术涉及车辆控制,尤其涉及一种车辆换挡控制方法、装置、设备及存储介质。
背景技术:
1、随着商用车技术的不断进步和环保要求的日益严格,混动重卡车辆作为一种高效且环保的运输工具,逐渐成为市场的新宠,混动重卡车辆集成了发动机、电机和变速箱等复杂传动系统,在提供强大动力的同时,也面临着换挡控制复杂多变的挑战。
2、混动重卡车辆的换挡点是一个关键的控制参数,它直接影响到车辆的动力性和经济性,若不能准确把控换挡点,容易导致换挡失败,换挡失败多发生在重载或大坡道的工况,在这种情况下,车辆受坡道的影响,输出轴转速变化快,不满足挂挡速差条件,从而容易发生挂挡打齿和挂挡失败的问题。
3、当前换挡策略一般根据油门和车速这两参数进行需求挡位升降挡判断,然而在加速和减速过程中,油门和车速的变化可能非常迅速,导致控制系统在短时间内多次触发升降挡操作,导致驾驶不稳定。如果只依赖油门和车速来判断,那么在加速和减速的临界点,可能会出现频繁升降挡的情况。
4、因此,得到一种高效且更准确的混动重卡车辆换挡控制方法,具有重要的现实意义和应用价值。
技术实现思路
1、针对上述问题,本技术提供了一种车辆换挡控制方法,包括以下内容:
2、第一方面,本技术提供了一种车辆换挡控制方法,该方法包括:
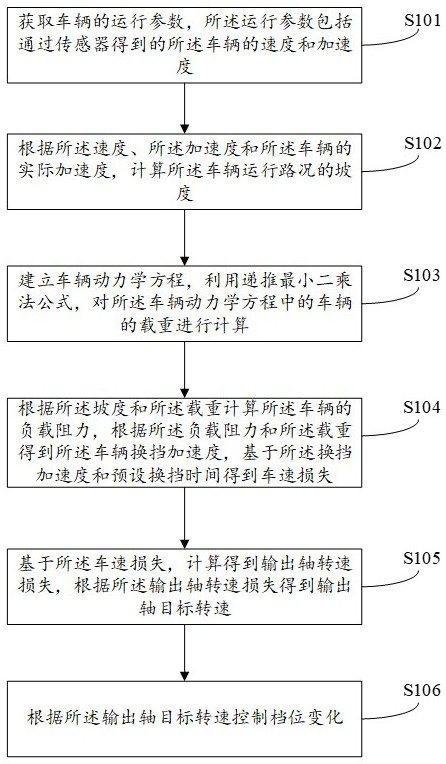
3、获取车辆的运行参数,所述运行参数包括通过传感器得到的所述车辆的速度和加速度;
4、根据所述速度、所述加速度和所述车辆的实际加速度,计算所述车辆运行路况的坡度;
5、建立车辆动力学方程,利用递推最小二乘法公式,对所述车辆动力学方程中的车辆的载重进行计算;
6、根据所述坡度和所述载重计算所述车辆的负载阻力,根据所述负载阻力和所述载重得到所述车辆的换挡加速度,基于所述换挡加速度和预设换挡时间得到车速损失;
7、基于所述车速损失,计算得到输出轴转速损失,根据所述输出轴转速损失得到输出轴目标转速;
8、根据所述输出轴目标转速控制挡位变化。
9、可选的,所述获取车辆的运行参数包括:
10、采集所述传感器的信号,所述传感器包括变速箱输出轴传感器和三轴加速度传感器;
11、通过所述变速箱输出轴传感器采集车辆速度信号,根据所述车辆速度信号得到所述速度;
12、通过所述三轴加速度传感器采集加速度信号,根据所述加速度信号得到所述加速度。
13、可选的,所述根据所述速度、所述加速度和所述车辆的实际加速度,计算所述车辆运行路况的坡度包括:
14、选定系统状态变量为速度和坡度倾角正弦值,基于车辆运动学原理,建立关于速度和坡度倾角正弦值的状态转移方程;
15、利用卡尔曼滤波算法,根据所述状态转移方程,结合所述速度和所述加速度,计算坡道倾角。
16、可选的,所述建立车辆动力学方程,利用递推最小二乘法公式,对所述车辆动力学方程中的车辆的载重进行计算包括:
17、建立至少包括发动机扭矩、电机扭矩、车辆负载阻力、车速、加速度和坡度参数的车辆动力学方程;
18、将所述车辆动力学方程转化为最小二乘算法形式,利用递推最小二乘法,通过迭代计算,求解出车辆载重的估计值。
19、可选的,其特征在于,对车辆的载重进行计算前,所述方法还包括:
20、获取车辆的所述加速度,将所述加速度与预设的加速度范围进行比较;
21、当所述加速度处于所述预设的加速度范围时,对所述车辆进行载重计算。
22、第二方面,本技术提供了一种车辆换挡控制装置,该装置包括:
23、获取单元,用于获取车辆的运行参数,所述运行参数包括通过传感器得到的所述车辆的速度和加速度;
24、第一计算单元,用于根据所述速度、所述加速度和所述车辆的实际加速度,计算所述车辆运行路况的坡度;
25、第二计算单元,用于建立车辆动力学方程,利用递推最小二乘法公式,对所述车辆动力学方程中的车辆的载重进行计算;
26、第三计算单元,用于根据所述坡度和所述载重计算所述车辆的负载阻力,根据所述负载阻力和所述载重得到所述车辆的换挡加速度,基于所述换挡加速度和预设换挡时间得到车速损失;
27、第四计算单元,用于基于所述车速损失,计算得到输出轴转速损失,根据所述输出轴转速损失得到输出轴目标转速;
28、控制单元,用于根据所述输出轴目标转速控制挡位变化。
29、可选的,所述获取单元具体用于:
30、采集所述传感器的信号,所述传感器包括变速箱输出轴传感器和三轴加速度传感器;
31、通过所述变速箱输出轴传感器采集车辆速度信号,根据所述车辆速度信号得到所述速度;
32、通过所述三轴加速度传感器采集加速度信号,根据所述加速度信号得到所述加速度。
33、可选的,所述第一计算单元具体用于:
34、选定系统状态变量为速度和坡度倾角正弦值,基于车辆运动学原理,建立关于速度和坡度倾角正弦值的状态转移方程;
35、利用卡尔曼滤波算法,根据所述状态转移方程,结合所述速度和所述加速度,计算坡道倾角。
36、可选的,所述第二计算单元具体用于,建立至少包括发动机扭矩、电机扭矩、车辆负载阻力、车速、加速度和坡度参数的车辆动力学方程;
37、将所述车辆动力学方程转化为最小二乘算法形式,利用递推最小二乘法,通过迭代计算,求解出车辆载重的估计值。
38、可选的,所述装置还包括,加速度获取单元,用于获取车辆的所述加速度,将所述加速度与预设的加速度范围进行比较;
39、当所述加速度处于所述预设的加速度范围时,对所述车辆进行载重计算。
40、第三方面,本技术提供了一种计算设备,所述计算设备包括存储器和处理器,所述存储器用于存储指令或代码,所述处理器用于执行所述指令或代码,以使所述设备执行前述第一方面任一实现方式中介绍的车辆换挡控制方法。
41、第四方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有代码,当所述代码被运行时,运行所述代码的设备实现前述第一方面任一实现方式中介绍的车辆换挡控制方法。
42、本技术提供了一种车辆换挡控制方法。在执行所述方法时,先获取车辆的运行参数,所述运行参数包括通过传感器得到的所述车辆的速度和加速度,然后根据所述速度、所述加速度和所述车辆的实际加速度,计算所述车辆运行路况的坡度,再建立车辆动力学方程,利用递推最小二乘法公式,对所述车辆动力学方程中的车辆的载重进行计算,根据所述坡度和所述载重计算所述车辆的负载阻力,根据所述负载阻力和所述载重得到所述车辆的换挡加速度,基于所述换挡加速度和预设换挡时间得到车速损失,再基于所述车速损失,计算得到输出轴转速损失,根据所述输出轴转速损失得到输出轴目标转速,最后根据所述输出轴目标转速控制挡位变化。如此通过计算车辆的载重和坡度预测,进而在换挡前预测车辆的车速损失,预估输出轴转速变化,提前调整输出轴的转速,以保证换挡成功率。进一步的,该方法能够提升车辆的行驶性能、安全性和用户体验,为车辆的整体性能和品质提升做出了重要贡献。
- 还没有人留言评论。精彩留言会获得点赞!